
1 整體設計方案及實現框圖
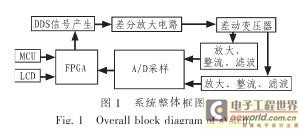
系統(tǒng)整體實現框圖如圖1所示,由信號產生部分、差分放大部分、變壓器耦合部分、信號處理部分、數據采樣部分和處理及顯示部分組成。利用DDS技術產生的信號經THS4503的差分放大之后送入差動變壓器,差動變壓器輸出的信號經放大、整流以及濾波處理之后送入MAXl97采樣,采樣得到的數據經處理單元處理后在LCD上顯示測得的位移量。
2 理論分析與計算
2.1 DDS信號產生理論分析
在系統(tǒng)時鐘頻率和相位累加器位數一定的情況下,輸出波形頻率由頻率控制字決定。設M為所設計的相位累加器的位數,N為頻率控制字,則DDS系統(tǒng)輸出信號的頻率為

實驗中,激勵信號的頻率是100 kHz,采用的時鐘頻率是40 MHz,頻率控制字是24位,相位累加器的位數是29位。然后經過D/A轉換器,輸出的信號經一個截止頻率是150 kHz的有源低通濾波器輸出,得到穩(wěn)定、連續(xù)平滑的波形。
2.2 數據處理方法分析
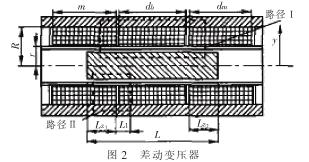
差動變壓器是開磁路,原、副邊間的互感隨磁芯移動而做相應的變化,使輸出的兩次級線圈的電壓隨之發(fā)生變化,將位移的變化轉化為輸出的電壓的變化,整流后采集數據,并進行數據處理,得到d值,圖2所示為差動變壓器數據處理采用查表法:首先采用游標卡尺測量若干組位移值,測量的組數根據測量范圍以及測量結果來確定,并記錄下相應的d值,繪制成一張表格。在實際測量時,根據測得的d值通過查表確定位移范圍,并在這一范圍內采用分段折線法處理得到精確的位移值。采用查表法可精確定位移范圍,得到的數據誤差較小,精度較高。
3 單元模塊電路設計
3.1 線性可變差動變壓器的設計
設計時應該考慮以下兩方面因素:1)能保證銜鐵工作時不會超出線圈之外;2)差動變壓器靈敏度。當按匝數增加時,可使靈敏度S增加,但按匝數的增加將受到線圈導線允許電流密度、導線發(fā)熱的散熱情況及磁飽和等因素的約束。
綜合以上分析,線圈分為上、中、下3段式,長度各為2 cm,中間部分線圈為初級線圈,上下兩部分為次級線圈。初、次級線圈的匝數比均為1:1,與之配套的磁棒長度也為2 cm。此線圈在線性移動范圍內效果較好,但是當移動到邊緣部分時由于磁力線分散,測得非線性的數據,但通過校準后仍能達到很高的精度。
3.2 差分放大電路
選用THS4503來做差分放大電路。由于激勵信號的頻率固定為100 kHz,故在差分放大器的反饋電阻上加上電容,達到濾波與避免自激的效果。從低通濾波器輸出的信號需經過差分放大器放大后輸出一對差分信號為變壓器的初級線圈提供電壓。電源采用±5 V雙電源供電,THS4 503的2個輸出端經2個阻值為12 Ω的隔離電阻與變壓器的初級線圈的兩端相連接。具體電路圖如圖3所示。

3.3 檢波電路
圖4為檢波電路。差動變壓器將位移量轉換成電壓信號,測量信號幅值或有效值再進行數據處理,便可得到相應的位移值。對于有效值的檢測,選用真有效值測量芯片AD637實現。平均電容C1設定平均時間常數,并決定低頻準確度,輸出紋波大小和穩(wěn)定時間。信號經放大后輸入到AD637進行有效值檢波,兩電位器分別進行調零和調幅,以使AD637的輸出更準確。

3.4 A/D采樣電路
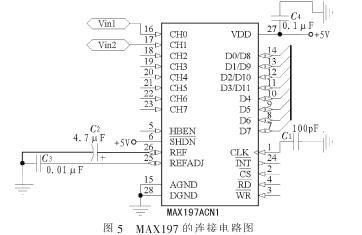
鐵芯在移動的過程中,輸出的電壓值變化范圍較大,因此,接入程控放大器,先通過A/D轉換器采樣,按照事先劃分的幅度帶對待處理信號進行幅度定位,然后控制放大器的檔位,以提高A/D轉換器的采樣精度,從而減小測量誤差。MAXl97采用的是內部時鐘和內部基準源,幾乎不需要外圍電路,電路結構簡單,應用方便。具體電路圖如圖5所示。
3.5 直流電機驅動電路
采用專用芯片L298HN作為電機驅動。電機起動時需要較大的電流,為了保證電機起動時對單片機控制板的供電系統(tǒng)不至于產生影響而產生掉電現象,需要采用光電耦合器TLP521-2GB進行電源隔離,同時應注意需要對L298HN的供電電壓進行去耦,以保證驅動電路的工作穩(wěn)定。電機驅動電路如圖6所示。

4 系統(tǒng)軟件程序設計
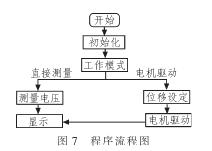
本系統(tǒng)由單片機與FPGA共同控制實現,FPGA主要用于ADC時序的控制以及數據的運算,單片機則用來實現人機的交互。程序采用結構化設計思想,軟件采用模塊化設計,主程序中調用各子程序,有專門的數據處理子程序、信號發(fā)生器子程序、掃描鍵盤子程序等。除了數據運算和顯示外,本系統(tǒng)還附加了自校正功能,即通過比較兩路信號的幅值控制電機的正轉和反轉,最終使鐵芯停在參考零的位置。圖7為程序流程。
5 系統(tǒng)測試與結果分析
5.1 使用儀器及型號
PC機:Intel奔騰D,主頻:2.5 G,內存:1 G;偉福仿真機:E51/S;直流穩(wěn)壓穩(wěn)流電源:SGl733SB3A;雙蹤數字存儲示波器:TEKT-RONLX TDS1002。
5.2 測試內容與結果
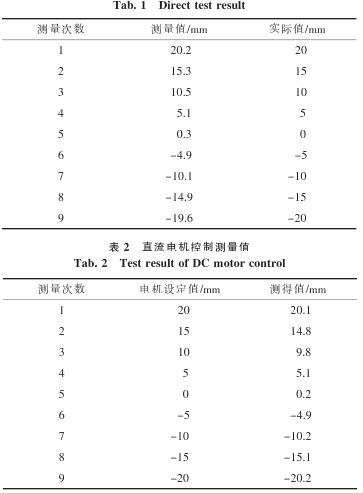
在電路調試的過程中,針對各個模塊分別進行調試,調試結果效果不錯,調試數據表格省略。進行整機調試時,測量了A、B、C 3點的信號波形。其中C處的信號波形良好,無失真。A、B 2點的輸出的直流信號無紋波抖動,而且數值準確。對于位移測量,實驗數據如表l和表2所示。對該位移測量結果進行分析,可以看出位移測量的精度較高,最大誤差是0.5 mm,測量范圍是-20~20 mm,總體來說,整個系統(tǒng)的完成情況較好。
6 結束語
該系統(tǒng)測量位移范圍擴展到-20~20 mm,實際測量到自制差動變壓器的近似線性范圍約為-24~24 mm,能夠實現較高的精度測量,同時也能夠達到不錯的動態(tài)范圍,但線性度不是很好,這主要是受線圈繞制的非理想均勻、對稱以及鐵芯規(guī)格不理想等因素的限制,但通過軟件校正可大大提高位移測量的精度,而且線性度的穩(wěn)定性也會有提高。