
前言
據(jù)初步調(diào)查統(tǒng)計(jì),75%的汽車交通事故是由汽車倒車“后視”小良造成的。因此,許多非職業(yè)汽車駕駛員很希望能有一種汽車倒車報(bào)警器,在倒車時(shí)不斷測(cè)量汽車尾部與其后面障礙物的距離,并隨時(shí)顯示其距離,在不同
的距離范圍內(nèi)發(fā)出不同的報(bào)警信號(hào),以提高汽車倒車時(shí)的安傘性。增強(qiáng)汽車的后視能力,尤其是增強(qiáng)大型、重型車輛的后視能力,對(duì)于提高行車安全,減輕司機(jī)的勞動(dòng)強(qiáng)度和心理壓力,是十分重要的。
目前,國內(nèi)外都在研究如何利用先進(jìn)的技術(shù),即汽車避撞技術(shù),輔助汽車駕駛者對(duì)影響公路交通安全的人、車、路環(huán)境進(jìn)行實(shí)時(shí)監(jiān)控,在危急情況下由系統(tǒng)主動(dòng)干涉駕駛操縱、輔助駕駛者進(jìn)行麻急處理、防I卜汽車
碰撞事故的發(fā)生。隨著人們對(duì)汽車駕駛輔助系統(tǒng)易用性要求的提高,以及單片機(jī)價(jià)格小斷下降和汽車電子系統(tǒng)網(wǎng)絡(luò)化發(fā)展的要求,新型的倒車?yán)走_(dá)都是以單片機(jī)為核心的智能測(cè)距傳感系統(tǒng)。本文介紹了一種基于MSP430單片機(jī)的超聲波倒車?yán)走_(dá)監(jiān)測(cè)報(bào)警系統(tǒng)。
1 系統(tǒng)測(cè)距原理
超聲波發(fā)射器向某一方向發(fā)射超聲波,在發(fā)射時(shí)刻的同時(shí)開始計(jì)時(shí),超聲波在窄氣中傳播,途中碰到障礙物就立即返回來,超聲波接收器收到反射波就立即停止計(jì)時(shí),超聲波在空氣中傳播的速度為340m/S,根據(jù)計(jì)時(shí)時(shí)間t,就可以計(jì)算出發(fā)射點(diǎn)距障礙物的距離S,即
S=340×t/2 (1)
這就是時(shí)間差測(cè)距法。本系統(tǒng)就是利用單片機(jī)控制超聲波發(fā)射器發(fā)射超盧波脈沖,同時(shí)利用單片機(jī)中的計(jì)數(shù)器開始計(jì)時(shí)。超聲波達(dá)到后面的障礙物就會(huì)反射回來,接收裝氍接收到回波信號(hào)后由外部比較電路產(chǎn)生高電平使單片機(jī)產(chǎn)生外部中斷。單片機(jī)運(yùn)行中斷服務(wù)子程序(ISR)計(jì)算出距離,并傳送給LCD顯示給司機(jī),同時(shí)程序內(nèi)還有比較模塊,若車距小于5 m,則顯示所測(cè)量的距離的同時(shí)單片機(jī)輸出一個(gè)高電平使蜂鳴器報(bào)警,若車距大于5m,則顯示U。U,蜂鳴器不報(bào)警,這樣以聲光兩種方式可靠地向司機(jī)給出報(bào)警信息,來保證倒車或行車的安全。
2系統(tǒng)硬件設(shè)計(jì)
2.1主控制器選擇及硬件組成
與常用的5 1系列單片機(jī)相比,MSP430系列單片機(jī)強(qiáng)大、功耗低、集成度高,其主要缺點(diǎn)是價(jià)格略高。為得到合適的性價(jià)比,選擇TI公司早期生產(chǎn)的MSP430F101,這種型號(hào)的單片機(jī)價(jià)格較低,功能雖然并不強(qiáng)大,但足110以滿足本系統(tǒng)要求。F 1的不足之處主要在于沒有液晶162驅(qū)動(dòng),選擇價(jià)格合理的液晶最示驅(qū)動(dòng)芯片HT 1便可解決這一問題。
系統(tǒng)硬件電路以MPS430F1101單片機(jī)為核心,所示,其主要由超聲波發(fā)射電路、超聲波接收電路、電源電路與報(bào)警電路等組成。
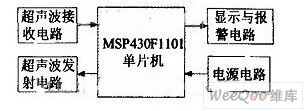
圖1系統(tǒng)硬件組成框圖
2.2超聲波發(fā)射信號(hào)
超聲波發(fā)射硬件電路框圖如圖2所示,單穩(wěn)觸發(fā)器接收來自押S430F1101的P1.3端口輸出的40ms觸發(fā)器的電壓提升和脈寬控制輸出頻率不變、高電平寬度為160us的方波,方波周期為40m s。此脈沖信號(hào)作為555振蕩器的置位脈沖。在置位期問,555定時(shí)產(chǎn)生40的振蕩信號(hào),由超聲波發(fā)射頭T40K 1將電信號(hào)轉(zhuǎn)化成超聲波發(fā)射出去。超聲發(fā)射器便發(fā)射出脈沖數(shù)為7個(gè)的脈沖串(1/40kHz=O.25ms),超聲波發(fā)射器的聲波傳物,再由反射物反射到接收器,傳播距離為2倍測(cè)量距離,由式(1)可知。
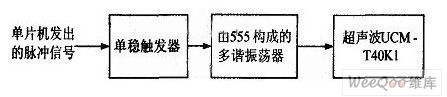
圖2超聲波發(fā)射硬件電路
2.3超聲波接收電路
超聲波接收電路如圖3所示,超聲波接收UCM—R40接收到的回波信號(hào)轉(zhuǎn)換成電壓信號(hào),經(jīng)過兩級(jí)放大及電壓整形電路,整形后的直流電壓并不平滑,需要再加一個(gè)電容C5濾波,濾波后的電壓范圍基本穩(wěn)定,用這個(gè)電1壓驅(qū)動(dòng)光電耦合器件SFH65A-1的發(fā)光二極管,這時(shí)光敏三極管導(dǎo)通,經(jīng)過一個(gè)反相器輸出電平信號(hào),再經(jīng)過一個(gè)反相器使電平信號(hào)基本穩(wěn)定。電平信號(hào)直接輸入單片機(jī)的外部中斷入口,該高電平作為MSP430的外部中斷的中斷信號(hào)使單片機(jī)產(chǎn)生中斷,在中斷服務(wù)程序中停止計(jì)數(shù)器的計(jì)時(shí),并計(jì)算出有關(guān)數(shù)據(jù)。
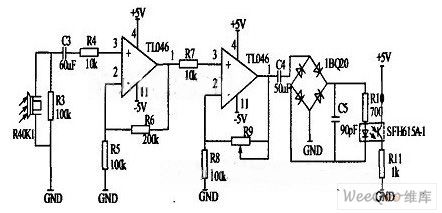
圖3超聲波接收電路
2.4顯示電路與報(bào)警提示設(shè)計(jì)
本系統(tǒng)要求兩位被測(cè)距離顯示和兩種不同距離值的警報(bào)提示信息。而LED顯示電路需要多個(gè)口線支持,所以選擇既能節(jié)省口線,又價(jià)格適中的液晶顯示驅(qū)動(dòng)器HT1621,該芯片同時(shí)提供2kHz和4kHz的兩種音頻格出,符合系統(tǒng)技術(shù)要求。顯示驅(qū)動(dòng)電路如圖4所示。
在外接32.768kHz的晶振頻率下,只需要選接HT1621的片選CS信號(hào)線(低電平有效)、寫允許WR信號(hào)線(低電有效)和串行數(shù)據(jù)輸入線DATA三根引線即可完成片選。LCD顯示器共有l(wèi)0個(gè)電極,其中背電極2個(gè)、段電極8個(gè),它們分別與HTl621的COM0~COMl及SEG0~SEG7相連。由于顯示RAM中的每一位均與一個(gè)顯示段相對(duì)應(yīng),僅需按照命令格式,依次向顯示RAM中寫入決定顯示段的段碼,即可實(shí)現(xiàn)LCD顯示驅(qū)動(dòng)。HT1621工作電壓選擇和單片機(jī)一致的2.5V經(jīng)過汽車電瓶電壓12V經(jīng)過GM6639降壓得到。
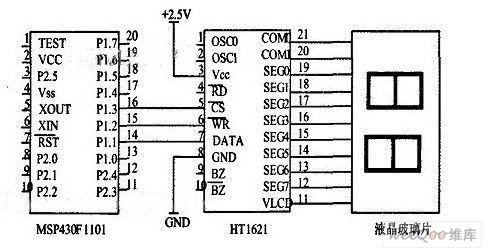
圖4 HTl621與單片機(jī)接線圖
1將 圖4 HTl621與單片機(jī)接線圖
由于HTl621芯片提供了兩種音頻輸出BZ和BZ(有效),在兩個(gè)音頻輸出并接在一個(gè)或門電路上由程序控制在不同的距離范圍內(nèi)選通不同的音頻輸出,這樣可根據(jù)不同的距離發(fā)出不同的報(bào)警提示。
2.5系統(tǒng)主程序設(shè)計(jì)
超盧波倒車?yán)走_(dá)監(jiān)測(cè)報(bào)警系統(tǒng)測(cè)距系統(tǒng)軟件主要完成三個(gè)任務(wù):
(1)Timer—A發(fā)送定時(shí)40ms的脈沖波,并在每一個(gè)脈沖發(fā)射的同時(shí)啟動(dòng)計(jì)數(shù)器,給比較單元CCRO賦初值;
(2)當(dāng)有外部中斷時(shí),進(jìn)入中斷服務(wù)予程序,如果此中斷到來之前計(jì)數(shù)器無溢出,則停止計(jì)算,進(jìn)入數(shù)據(jù)處理單元。如果中斷到來前計(jì)數(shù)器有溢出則進(jìn)入出錯(cuò)管理,屏蔽一個(gè)中斷源,累計(jì)測(cè)量次數(shù)自加一;
(3)用單片機(jī)控制液晶驅(qū)動(dòng)HT162l,計(jì)算得到的距離值,通過串行傳輸方式送給顯示芯片,并比較其大小,當(dāng)距離在小于0.5m時(shí)選通BZ(4knz音頻輸出)離小于2m時(shí)選通BZ(2kHz音頻輸出)。
3總結(jié)
系統(tǒng)利用超聲波在空氣中的可傳播性,在將時(shí)間和速度相乘即得距離的原理,設(shè)計(jì)了一個(gè)基于MSP430的超聲波倒車?yán)走_(dá)監(jiān)測(cè)報(bào)警系統(tǒng),用于實(shí)時(shí)測(cè)得汽車尾部與障礙物的距離,通過LCD顯示距離值,將距離值提供給司機(jī),該系統(tǒng)最大測(cè)量距離是6.5m,精確度是I5cm,它具有成本低、非接觸、速度快、精度高、可靠性強(qiáng)、適應(yīng)性好、操作方便,有著廣泛的應(yīng)用前景。