
《控制與傳動(dòng)》2012年第2期 太原科技大學(xué) 電子信息工程學(xué)院 孔強(qiáng)強(qiáng) 供稿
1引言
當(dāng)前,國(guó)內(nèi)彈簧產(chǎn)品設(shè)計(jì)制造工藝生產(chǎn)設(shè)備快速發(fā)展,,彈簧材料性能方面也迅速提高,,同樣對(duì)應(yīng)用彈簧的性能要求也越來越高。所以,,能實(shí)現(xiàn)彈簧性能檢測(cè)的智能化設(shè)備的開發(fā),,成為彈簧工業(yè)發(fā)展的需要和必然趨勢(shì)。近年來隨著彈簧生產(chǎn)企業(yè)質(zhì)量意識(shí)的提高,,越來越多的自動(dòng)化設(shè)備,,如傳感器、控制器,、智能儀表等應(yīng)用到工業(yè)生產(chǎn)的控制現(xiàn)場(chǎng)中來,。本設(shè)計(jì)涉及機(jī)械、電子,、控制及氣動(dòng)等各學(xué)科領(lǐng)域技術(shù),,裝置由機(jī)械、電氣,、軟件三部分組成,,是一個(gè)典型的機(jī)電一體化系統(tǒng),可實(shí)現(xiàn)數(shù)控系統(tǒng)的精確定位控制和計(jì)算機(jī)與PLC的串行通信,,并以專家控制方式對(duì)整個(gè)檢測(cè)過程進(jìn)行實(shí)時(shí)監(jiān)控,,具備智能化功能,可自動(dòng)記錄管理數(shù)據(jù),,判斷檢測(cè)結(jié)果,,分析故障原因,該產(chǎn)品的設(shè)計(jì)開發(fā)可大大提高彈簧性能檢測(cè)的高效性和準(zhǔn)確性,。
2彈簧性能檢測(cè)系統(tǒng)概述
2.1檢測(cè)系統(tǒng)的組成[1]
一只彈簧有多個(gè)參數(shù)需要檢測(cè),,如負(fù)荷、剛度,、柔度等,,其中負(fù)荷是最常見的檢測(cè)指標(biāo),它表明了在指定變形的情況下,,該彈簧所產(chǎn)生的負(fù)荷值,,用以控制自動(dòng)機(jī)械所需要的動(dòng)力,同時(shí)又不至于產(chǎn)生過大的載荷,。所以本系統(tǒng)就是通過檢測(cè)彈簧在壓縮或拉伸到一定程度,,其力值輸出是否達(dá)到系統(tǒng)要求,來對(duì)成批彈簧進(jìn)行分選檢測(cè),。彈簧性能檢測(cè)系統(tǒng)由上位機(jī)和下位機(jī)組成,,包括機(jī)械部分,、電氣控制部分,、計(jì)算機(jī)軟件部分,,檢測(cè)系統(tǒng)結(jié)構(gòu)示意圖如圖1所示。
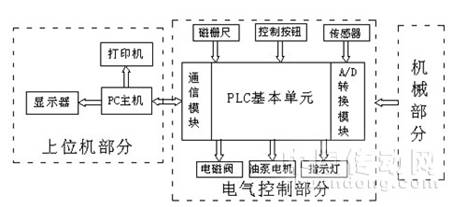
圖1彈簧檢測(cè)系統(tǒng)結(jié)構(gòu)示意圖
2.2工作原理
檢測(cè)系統(tǒng)根據(jù)設(shè)置可完成智能化運(yùn)行,,為實(shí)現(xiàn)彈簧性能檢測(cè)系統(tǒng)檢測(cè)過程的全自動(dòng)化,,達(dá)到智能控制要求,操作員在進(jìn)行操作前需要通過上位機(jī)軟件對(duì)整個(gè)檢測(cè)過程進(jìn)行參數(shù)設(shè)置,,設(shè)置的內(nèi)容包括彈簧類型,、彈簧壓縮次數(shù)、每次壓縮行程,、合格標(biāo)準(zhǔn),、限位設(shè)置等多項(xiàng)內(nèi)容。工作原理為:通過壓力傳感器采集當(dāng)前彈簧壓縮狀態(tài)下的回彈力,,并將其轉(zhuǎn)化成4—20mA的電流型信號(hào),,傳遞給主控制器PLC的模擬量接收模塊。PLC對(duì)所采集的信號(hào)進(jìn)行A/D轉(zhuǎn)換,、濾波,、整流等處理,再與上位機(jī)計(jì)算機(jī)進(jìn)行串行通信,,把處理后的信號(hào)發(fā)送到計(jì)算機(jī)的緩存區(qū)中,。伺服系統(tǒng)接收到控制信號(hào)后,可完成對(duì)伺服電機(jī)的正,、反轉(zhuǎn),,旋轉(zhuǎn)角度,旋轉(zhuǎn)速度等動(dòng)作的控制,,通過同步齒形帶將動(dòng)作再次傳遞給絲杠,,完成絲杠與彈簧座的一同上下動(dòng)作,從而使被測(cè)彈簧實(shí)現(xiàn)伸縮檢測(cè),。整個(gè)檢測(cè)過程的工作原理如圖2所示,。
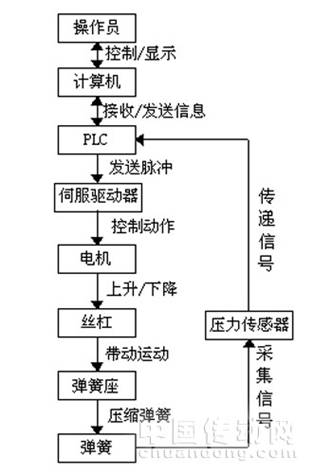
圖2彈簧檢測(cè)裝置工作原理框圖
系統(tǒng)設(shè)有校驗(yàn)、手動(dòng),、自動(dòng)3種工作方式,。校驗(yàn)工作方式:每次系統(tǒng)上電開機(jī)時(shí),設(shè)定的標(biāo)準(zhǔn)長(zhǎng)度的量程對(duì)測(cè)試機(jī)壓頭與底座之問的高度進(jìn)行校驗(yàn),,以保證測(cè)試的準(zhǔn)確性,;手動(dòng)工作方式:在設(shè)備調(diào)試或計(jì)算機(jī)系統(tǒng)出現(xiàn)故障時(shí),可通過手動(dòng)方式測(cè)試彈簧參數(shù),;自動(dòng)工作方式:根據(jù)不同型號(hào)的彈簧,,自動(dòng)將伸縮力分為N等份,,在彈簧壓縮過程中,每經(jīng)過一個(gè)壓縮點(diǎn),,將壓縮力,、彈簧高度、壓縮量作為一組數(shù)據(jù)儲(chǔ)存在相應(yīng)的PLC數(shù)據(jù)寄存器中,。
3系統(tǒng)硬件設(shè)計(jì)
3.1機(jī)械部分設(shè)計(jì)
在機(jī)械部分中,,綜合考慮到技術(shù)性能要求、可靠性要求,、安全性要求和標(biāo)準(zhǔn)化要求等方面,,檢測(cè)裝置采用雙工位作業(yè)設(shè)計(jì),可同時(shí)檢測(cè)2種不同型號(hào)的彈簧,;在機(jī)械結(jié)構(gòu)設(shè)計(jì)上考慮到彈簧產(chǎn)品上下檢測(cè)臺(tái)的方便,,人性化設(shè)備的外形尺寸;在操作方面,,為使操作者能夠多角度操作,,操作箱與床身由活動(dòng)的轉(zhuǎn)向架連接,可旋轉(zhuǎn)180度的角度,;在安全作業(yè)方面,,每個(gè)待測(cè)彈簧放在帶有刪槽的彈簧樁上,防止側(cè)滑,,四周4根同定桿組成防護(hù)欄防止向外彈,,其中一根存上下貨時(shí)可拆卸;在移動(dòng)方面,,檢測(cè)裝置安裝有4個(gè)帶剎車的滑輪,,可方便地移動(dòng)與固定。
3.2電氣部分設(shè)計(jì)
檢測(cè)裝置的電氣控制部分以西門子S7-200PLC為控制核心,,每個(gè)工位配有獨(dú)立壓力傳感器,、電機(jī)、伺服系統(tǒng),、傳送帶,、控制按鈕等,可完成自動(dòng)和手動(dòng)兩種控制功能,。系統(tǒng)主要包括計(jì)算機(jī)系統(tǒng)(主機(jī),、顯示器、打印機(jī)),、PLC基本單元,、模擬量擴(kuò)展單元、通信模塊,、文本顯示器,、磁柵尺,、負(fù)荷傳感器等。PLC控制端口定義見表1,。
|
輸入端口定義(I) |
|
|
I0.0 1#工作臺(tái)自動(dòng)/手動(dòng)切換 |
1=自動(dòng),,0=手動(dòng) |
|
I0.1 1#工作臺(tái)氣缸動(dòng)作狀態(tài)輸入 |
1=向上運(yùn)動(dòng),0=向下運(yùn)動(dòng) |
|
I0.2 控制1#工作臺(tái)電機(jī)向上運(yùn)動(dòng) |
1=啟動(dòng),,0=停止 |
|
I0.3 控制1#工作臺(tái)電機(jī)向下運(yùn)動(dòng) |
1=啟動(dòng),,0=停止 |
|
I0.4 1#工作臺(tái)上限位指示 |
1=彈簧到達(dá)上限位,,0=彈簧未到達(dá)上限位 |
|
I0.5 1#工作臺(tái)下限位指示 |
1=彈簧到達(dá)下限位,,0=彈簧未到達(dá)下限位 |
|
I1.0 2#工作臺(tái)自動(dòng)/手動(dòng)切換 |
1=自動(dòng),0=手動(dòng) |
|
I1.1 2#工作臺(tái)氣缸動(dòng)作狀態(tài)輸入 |
1=向上運(yùn)動(dòng),,0=向下運(yùn)動(dòng) |
|
I1.2 控制2#工作臺(tái)電機(jī)向上運(yùn)動(dòng) |
1=啟動(dòng),,0=停止 |
|
I1.3 控制2#工作臺(tái)電機(jī)向下運(yùn)動(dòng) |
1=啟動(dòng),0=停止 |
|
I1.4 2#工作臺(tái)上限位指示 |
1=彈簧到達(dá)上限位,,0=彈簧未到達(dá)上限位 |
|
I1.5 2#工作臺(tái)下限位指示 |
1=彈簧到達(dá)下限位,,0=彈簧未到達(dá)下限位 |
|
輸出端口定義(O) |
|
|
Q0.0 1#工作臺(tái)伺服器位置給定 |
HSC0 脈沖串輸出端口 |
|
Q0.1 2#工作臺(tái)伺服器位置給定 |
HSC3 脈沖串輸出端口 |
|
Q0.2 1#工作臺(tái)伺服器方向給定 |
1=啟動(dòng),0=停止 |
|
Q0.3 2#工作臺(tái)伺服器方向給定 |
1=啟動(dòng),,0=停止 |
|
Q0.4 1#工作臺(tái)伺服器使能給定 |
1=彈簧到達(dá)上限位,,0=彈簧未到達(dá)上限位 |
|
Q0.5 2#工作臺(tái)伺服器使能給定 |
1=彈簧到達(dá)下限位,0=彈簧未到達(dá)下限位 |
|
Q0.6 1#工作臺(tái)氣缸動(dòng)作狀態(tài)輸出 |
1=向上運(yùn)動(dòng),,0=向下運(yùn)動(dòng) |
|
Q0.7 2#工作臺(tái)氣缸動(dòng)作狀態(tài)輸出 |
1=向上運(yùn)動(dòng),,0=向下運(yùn)動(dòng) |
|
接收緩沖區(qū):VB100,大小為10個(gè)字節(jié) |
發(fā)送緩沖區(qū):VB200,,大小為39個(gè)字節(jié) |
表1PLC輸入/輸出端口定義
PLC實(shí)現(xiàn)系統(tǒng)的定位控制主要表現(xiàn)在:PLC通過對(duì)伺服驅(qū)動(dòng)器的脈沖信號(hào),、正/反轉(zhuǎn)信號(hào)、使能信號(hào)等的控制,,從而使伺服驅(qū)動(dòng)器能夠精確地控制電機(jī)的轉(zhuǎn)速,、轉(zhuǎn)角、方向等,,電機(jī)再帶動(dòng)絲杠運(yùn)動(dòng),,完成彈簧座的定位控制。在定位控制過程中,,主要影響定位精度的因素有:(1)定位控制過程中所涉及到的一系列傳動(dòng)機(jī)械誤差,,包括絲杠間隙、同步齒形帶的松緊等因素,。(2)根據(jù)實(shí)際情況計(jì)算的PLC向伺服驅(qū)動(dòng)器發(fā)送脈沖信號(hào)的準(zhǔn)確度,。
在本檢測(cè)裝置中,PLC選用了SIEMENSS7—200系列PLC,,它具有高速脈沖輸出功能,,能在輸出端產(chǎn)生高速脈沖,,用來驅(qū)動(dòng)負(fù)載實(shí)現(xiàn)精確控制。高速脈沖輸出有高速脈沖串輸出PT0和脈寬調(diào)制PWM兩種方式,。PT0可以輸出一串脈沖(占空比50%),,可以控制脈沖的周期和個(gè)數(shù)。脈沖周期變化范圍是10~65535us或2~65535ms,,為16位無符號(hào)數(shù)據(jù),;脈沖個(gè)數(shù)用雙字無符號(hào)數(shù)表示,取值范圍是1~4294967295之間,。PWM可以輸出連續(xù)的,、占空比可調(diào)的脈沖串,可以控制脈沖的周期和脈寬,。脈沖周期與PTO相同,,脈寬變化范圍是0~65535us或0~65535ms。PT0/PWM輸出不受PLC掃描周期的影響,,這樣可以滿足系統(tǒng)精確定位的要求,。
3.3控制方案設(shè)計(jì)
按數(shù)控系統(tǒng)的進(jìn)給伺服系統(tǒng)有無位置測(cè)量反饋裝置可分為開環(huán)數(shù)控系統(tǒng)和閉環(huán)數(shù)控系統(tǒng)。開環(huán)伺服系統(tǒng)無位置反饋,,是數(shù)控系統(tǒng)中最簡(jiǎn)單的伺服系統(tǒng),,其驅(qū)動(dòng)元件主要為功率步進(jìn)電機(jī)。PLC發(fā)出的指令脈沖,,通過驅(qū)動(dòng)電路放大送到步進(jìn)電機(jī),,電機(jī)輸出軸轉(zhuǎn)過一定的角度,再通過同步齒形帶和絲杠螺母帶動(dòng)絲杠和彈簧座上下移動(dòng),。步進(jìn)電機(jī)軸轉(zhuǎn)過的角度正比于指令脈沖的個(gè)數(shù),,旋轉(zhuǎn)速度的大小正比于指令脈沖的頻率。由于沒有檢測(cè)反饋裝置,,系統(tǒng)中各部分誤差,,如步進(jìn)電機(jī)的步距誤差、機(jī)械系統(tǒng)的誤差等綜合為系統(tǒng)的位置誤差,,所以精度較低,,速度也受到步進(jìn)電機(jī)性能的限制,低速不平穩(wěn),,高速扭矩小,。但開環(huán)系統(tǒng)結(jié)構(gòu)簡(jiǎn)單,易于控制與調(diào)整,,一般用于輕載,、負(fù)載變化不大、精度要求不高的場(chǎng)合,在經(jīng)濟(jì)型數(shù)控機(jī)床和普通機(jī)床改造中使用較多,。在解彈簧檢測(cè)過程中,,壓縮尺寸精度誤差要求為0.1mm,所以在伺服系統(tǒng)控制方式上采用開環(huán)方式控制,。
4系統(tǒng)軟件設(shè)計(jì)
檢測(cè)裝置的軟件部分,,主要指測(cè)試裝置的監(jiān)控軟件和下位機(jī)PLC控制站軟件設(shè)計(jì)。上位機(jī)監(jiān)控系統(tǒng)功能框圖如圖3所示,。
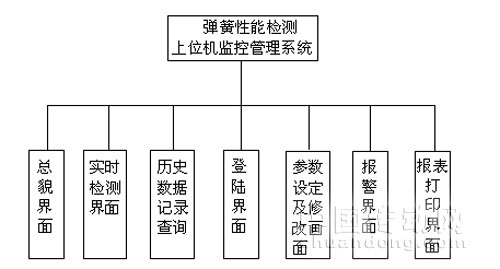
圖3上位機(jī)監(jiān)控系統(tǒng)功能框圖
該軟件是根據(jù)彈簧的檢測(cè)工藝流程,,基于VB6.0編程軟件編制而成的.采用專家控制方式對(duì)整個(gè)檢測(cè)過程進(jìn)行實(shí)時(shí)監(jiān)控,具有彈簧壓縮參數(shù)設(shè)置,、測(cè)試數(shù)據(jù)記錄查詢,、打印報(bào)表、模擬鍵盤輸入等功能,。檢測(cè)裝置的主控制界面如圖4所示,。
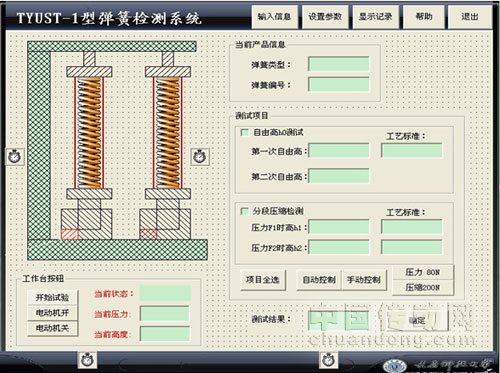
圖4上位機(jī)主控制界面
監(jiān)控軟件一方面通過對(duì)計(jì)算機(jī)緩存區(qū)中接收到的信息進(jìn)行解析,判斷處理,,完成彈簧檢測(cè)過程的實(shí)時(shí)動(dòng)態(tài)顯示、數(shù)據(jù)記錄,、限位報(bào)警,、故障診斷等操作;另一方面通過對(duì)PLC發(fā)送控制信息,,完成對(duì)伺服系統(tǒng)高頻脈沖信號(hào),、開關(guān)量信號(hào)的輸入。PLC與計(jì)算機(jī)的串行通信是通過PLC控制器上的RS-485串口和計(jì)算機(jī)上的RS232串口來完成的,。PLC控制通過“校驗(yàn),、手動(dòng)、自動(dòng)”選擇開關(guān)選擇相應(yīng)的工作方式,,主程序流程圖如圖5所示,。
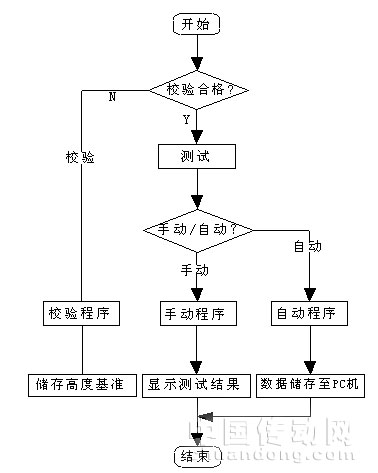
圖5主程序流程圖
5結(jié)語
本系統(tǒng)功能較強(qiáng),采用了可靠性較高的工控計(jì)算機(jī)和PLC進(jìn)行控制,,實(shí)現(xiàn)了檢測(cè)過程的智能化,。自動(dòng)化程度高,可靠性好,,不但排除了原有檢測(cè)過程中人為因素的影響,,使檢測(cè)結(jié)果更加準(zhǔn)確,而且大大降低了工人的勞動(dòng)強(qiáng)度,,節(jié)約了作業(yè)時(shí)間,,提高了生產(chǎn)效率。投入應(yīng)用以來,設(shè)備運(yùn)行正常,,維護(hù),、檢修工作量少,大大降低了維護(hù)檢修費(fèi)用,;另外,,其友好的人機(jī)界面,使得整個(gè)系統(tǒng)更形象直觀,,易于操作,,保證了現(xiàn)場(chǎng)運(yùn)行的安全可靠性,在彈簧工業(yè)發(fā)展中具有較高的推廣價(jià)值,。
參考文獻(xiàn)
[1]王興,,趙媛靜.基于PLC控制的制動(dòng)缸緩解彈簧檢測(cè)裝置[J].工程與實(shí)驗(yàn).2011(5).
[2]章彬宏,王琳.基于PLC的彈簧測(cè)試機(jī)控制系統(tǒng)[J].科技論壇,,2003(9).
[3]廖常初.PLC編程及應(yīng)用[M].北京:機(jī)械工業(yè)出版社.2005.
[4]許萬里.智能彈簧檢測(cè)裝置的研制[J].應(yīng)用科技.2001,,28(7).