
以太網(wǎng)接口通信速度快,傳輸可靠,使用和配置方便,對于20 Mb/s以下的碼速率,100 Mb/s的網(wǎng)卡可以進(jìn)行不丟包轉(zhuǎn)發(fā),采用TCP包格式還可使設(shè)備小型化,便于數(shù)據(jù)的轉(zhuǎn)發(fā),因此有必要擴(kuò)展設(shè)備的以太網(wǎng)功能。
1 整體模塊設(shè)計(jì)
1.1 系統(tǒng)設(shè)計(jì)
系統(tǒng)設(shè)計(jì)框圖如圖1所示。其中,采編器或接收機(jī)解調(diào)輸出的PCM信號及時(shí)鐘輸入到FPGA中進(jìn)行幀同步,IRIG—B碼信息也送到FPGA中進(jìn)行解調(diào),得到時(shí)間信息。數(shù)據(jù)與時(shí)間一起存入SRAM乒乓緩沖區(qū)中,達(dá)到一定大小后,F(xiàn)PGA向ARM處理器發(fā)器中斷,ARM中運(yùn)行的Linux系統(tǒng),將數(shù)據(jù)取走,進(jìn)行TCP/IP打包,發(fā)送給接收計(jì)算機(jī)。
網(wǎng)絡(luò)化采集" height="222" src="http://files.chinaaet.com/images/20111118/384766c4-6d75-4cda-a513-09d019d1e21b.jpg" width="244" />
在設(shè)備開始工作前,需要在計(jì)算機(jī)端進(jìn)行參數(shù)設(shè)置,計(jì)算機(jī)TCP/IP包將參數(shù)發(fā)送給ARM處理器,由ARM處理器轉(zhuǎn)發(fā)給FPGA。幀同步器的設(shè)計(jì)中,碼速率為100b/s~10Mb/s,幀長為4~4096Word,幀同步碼組為4~32,ARM網(wǎng)卡為100Mb/s。
1.2 硬件實(shí)現(xiàn)
PCB采用6層結(jié)構(gòu),相鄰布線層,水平垂直交叉,電路層與電源層單獨(dú)分開,提供良好的電磁兼容特性。
1.2.1 FPGA
FPGA選擇EP1C12,為實(shí)現(xiàn)乒乓緩沖結(jié)構(gòu),采用SRAM為IS61LV25616。輸入信號使用SMA線纜連接,在傳輸過程中會引入衰減,信號輸入輸出易出現(xiàn)阻抗不匹配的情況,選用AD8556構(gòu)成射隨器,對輸入信號進(jìn)行匹配,同時(shí)也增大模擬源的輸出能力。
1.2.2 ARM
在此采用S3C2440,內(nèi)核為ARM920T,最高頻率為400MHz,帶MMU支持操作系統(tǒng)。內(nèi)存采用2×32MB的SDRAM,存儲采用128MB NAND FLASH,網(wǎng)卡采用DM9000A。
1.2.3 ARM與FPGA的接口連接
這里采用總線接口,將FPGA作為一個(gè)存儲設(shè)備掛在ARM的存儲器總線上,如圖2所示。
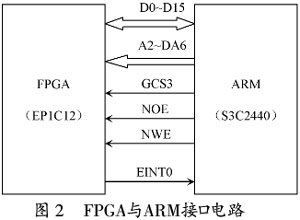
FPGA在ARM中起始地址為0x18000000,以4B對齊,占用0x80個(gè)地址,地址范圍為0x18000000~Ox1800007C,中斷為EINT0。
在FPGA內(nèi)部采用讀/寫指針來模擬FIFO,用一個(gè)地址來讀取FPGA數(shù)據(jù),其余地址用于配置幀同步器與模擬源的參數(shù)。
2 幀同步與B碼解調(diào)
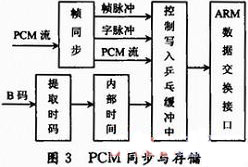
FPGA完成PCM數(shù)據(jù)的幀同步和解調(diào)B碼,寫入到乒乓SRAM緩沖區(qū)中,實(shí)現(xiàn)如圖3所示。
2.1 幀同步模塊
幀同步器根據(jù)幀同步碼組的相關(guān)性和周期性,經(jīng)過相關(guān)運(yùn)算將同步碼從PCM串行流中識別出來,原理框圖如圖4所示。
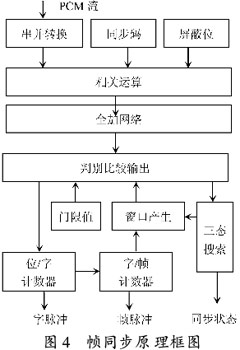
PCM數(shù)據(jù)按時(shí)鐘進(jìn)行串/并轉(zhuǎn)換,與本地幀同步碼進(jìn)行同或運(yùn)算后再與上屏蔽位,由全加網(wǎng)絡(luò)將相關(guān)運(yùn)算結(jié)果按位相加統(tǒng)計(jì)結(jié)果中1的個(gè)數(shù),大于門限值則表示可能接收到了幀同步碼。
為避免虛警和漏檢,使幀同步器穩(wěn)定可靠工作,采用搜索、校核、鎖定三態(tài)邏輯。
系統(tǒng)開始時(shí)處于搜索態(tài),符合相關(guān)器輸出,由搜索態(tài)轉(zhuǎn)入校核態(tài)。在預(yù)期檢測窗口內(nèi)沒有幀碼,從校核返回到搜索態(tài)。連續(xù)通過校核數(shù)α,進(jìn)入鎖定態(tài)。為避免幀同步碼的漏檢,連續(xù)漏檢超過保護(hù)幀數(shù)β,幀同步才返回搜索態(tài),否則保持在鎖定態(tài),幀脈沖由本地產(chǎn)生。
2.2 IRIG—B碼解調(diào)
IRIG時(shí)間序列碼是一種串行碼,共有3種碼元,如圖5所示。
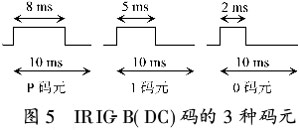
P碼元是位置碼元,連續(xù)2個(gè)P碼為一幀的開始,第1個(gè)P碼元定義為P0,第2個(gè)P碼元為秒脈沖pps,上升沿為該秒的準(zhǔn)時(shí)刻,時(shí)間信息以BCD碼依次分布在其后的碼元中。解調(diào)時(shí)先進(jìn)行pps的提取,再進(jìn)行秒、分、時(shí)、天的信息提取,其流程如圖6所示。

時(shí)鐘頻率為1MHz,用計(jì)數(shù)器對輸入信號的脈寬進(jìn)行計(jì)數(shù)。8ms,5ms,2ms脈寬計(jì)數(shù)為8000,5000,2000。輸入B碼的脈寬會混有干擾,晶振時(shí)鐘也存在一定的誤差,計(jì)數(shù)器的計(jì)時(shí)判別應(yīng)浮動一個(gè)范圍,設(shè)置門限為脈寬的85%~115%,當(dāng)滿足一定范圍的數(shù)值時(shí),分別輸出P碼,0碼,1碼信號。
FPGA中的時(shí)碼產(chǎn)生“天:時(shí):分:秒:毫秒:微秒”信息。解調(diào)出B碼時(shí),F(xiàn)PGA更新內(nèi)部時(shí)間,B碼中不含毫秒與微秒信息,由FPGA根據(jù)秒脈沖信息的準(zhǔn)時(shí)刻來生成。
3 FPGA驅(qū)動程序開發(fā)
在Linux中,所有的硬件設(shè)備都像常規(guī)文件一樣進(jìn)行打開、關(guān)閉和讀/寫。把FPGA當(dāng)作字符設(shè)備進(jìn)行設(shè)計(jì),驅(qū)動由設(shè)備加載與卸載,以及文件操作file_operation結(jié)構(gòu)體中成員函數(shù)組成。
3.1 加載與卸栽設(shè)備驅(qū)動
FPGA設(shè)備驅(qū)動程序初始化流程為動態(tài)獲得主設(shè)備號、字符設(shè)備注冊和申請中斷;卸載流程為注銷設(shè)備,釋放設(shè)備編號。
定義一個(gè)設(shè)備結(jié)構(gòu)體來表示FPGA,如下:
當(dāng)用戶程序讀FPGA設(shè)備時(shí),數(shù)據(jù)還未準(zhǔn)備好,此時(shí)驅(qū)動程序應(yīng)該阻塞該進(jìn)程,將其置入睡眠狀態(tài)直到條件滿足。此時(shí)需要初始化一個(gè)等待隊(duì)列頭,對讀進(jìn)程的休眠和喚醒時(shí)使用:
![]()
在卸載函數(shù)中,刪除一個(gè)cdev,完成字符設(shè)備的注銷,然后釋放設(shè)備編號:
![]()
3.2 文件接口操作
Linux為所有的設(shè)備文件都提供了統(tǒng)一的操作函數(shù),F(xiàn)PGA設(shè)備驅(qū)動。file_operations包含打開函fpga_open、讀函數(shù)fpga_read、設(shè)置參數(shù)函數(shù)fpga_ioctl和關(guān)閉設(shè)備函數(shù)fpga_release。
3.2.1 打開與關(guān)閉FPGA設(shè)備
在打開設(shè)備與關(guān)閉設(shè)備時(shí)會調(diào)用open函數(shù)與release函數(shù),在open函數(shù)中,要對設(shè)備進(jìn)行I/O內(nèi)存資源映射及中斷申請。
設(shè)備驅(qū)動程序中,需通過內(nèi)存管理單元MMU將設(shè)備的虛擬地址映射到物理地址。根據(jù)FPGA在S3C2440中的物理地址,定義如下宏:
![]()
使用ioremap()對FPGA的I/O內(nèi)存資源進(jìn)行映射,把物理內(nèi)存地址映射為一個(gè)內(nèi)核指針:
![]()
數(shù)據(jù)交換采用中斷,需先設(shè)置硬件中斷方式,然后向系統(tǒng)注冊中斷函數(shù),實(shí)現(xiàn)如下:
![]()
FPGA連接在ARM的EINT0上,isr_fpga為中斷處理函數(shù)指針。當(dāng)關(guān)閉FPGA設(shè)備時(shí),需釋放I/O內(nèi)存,釋放中斷:
![]()
3.2.2 驅(qū)動程序控制接口Ioctl
Ioctl用來設(shè)置FPGA中幀同步器和模擬源的參數(shù),部分設(shè)置命令如表1所示。
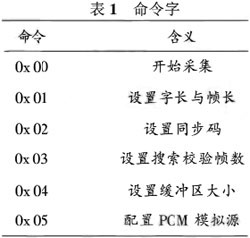
在此,采用統(tǒng)一的命令碼方式,包含幻數(shù)、序數(shù)、傳輸方向、數(shù)據(jù)長度,使用宏_IO(),_IOR(),_IOW()和IOWR()輔助生成,如命令0設(shè)置如下:

在Ioctl中,采用switeh(cmd)來實(shí)現(xiàn)對FPGA參數(shù)的設(shè)置及FPGA狀態(tài)的讀取。
3.2.3 中斷函數(shù)及讀函數(shù)
當(dāng)FPGA產(chǎn)生中斷時(shí),根據(jù)緩沖區(qū)的大小,中斷函數(shù)循環(huán)對FPGA映射后的地址讀取數(shù)據(jù)。ARM與FPGA接口為16位,使用inw讀取,數(shù)據(jù)存放在驅(qū)動程序的緩沖區(qū)中:

應(yīng)用程序讀取數(shù)據(jù)時(shí),調(diào)用read函數(shù),參數(shù)buffer為用戶空間緩沖區(qū)的指針,利用copy_to_user函數(shù)將數(shù)據(jù)從內(nèi)核空間拷貝到用戶空間,當(dāng)設(shè)備中暫時(shí)沒有數(shù)據(jù)時(shí),讀進(jìn)程應(yīng)當(dāng)被休眠:
![]()
flag為一個(gè)標(biāo)志位,當(dāng)flag被中斷函數(shù)設(shè)置為1時(shí)表示設(shè)備中有數(shù)據(jù),此時(shí)讀進(jìn)程可被換醒。
3.2.4 用戶程序及測試
設(shè)備驅(qū)動實(shí)現(xiàn)后,需編寫相應(yīng)的用戶程序來進(jìn)行測試驅(qū)動程序和實(shí)現(xiàn)數(shù)據(jù)的網(wǎng)絡(luò)轉(zhuǎn)發(fā)。在用戶程序中,讀/寫FPGA設(shè)備使用與普通文件一樣的操作函數(shù)。移植Linux時(shí)配置好網(wǎng)卡的地址,然后使用Socket編程實(shí)現(xiàn)數(shù)據(jù)的TCP/IP轉(zhuǎn)發(fā),用遙測軟件接收到的數(shù)據(jù)測試如圖7所示。
通過測試可以看到,同步碼FDB18450被正確識別,IRIG-B解碼為當(dāng)前時(shí)間。
4 結(jié)語
在此,基于FPGA與ARM進(jìn)行遙測數(shù)據(jù)的幀同步遙測數(shù)據(jù)的網(wǎng)絡(luò)轉(zhuǎn)發(fā),充分地利用了FPGA與ARM各自的特點(diǎn),它可使FPGA+ARM在數(shù)據(jù)接收處理中得到廣泛應(yīng)用。