
1 引言
太陽能以其不竭性和環(huán)保優(yōu)勢已成為當(dāng)今國內(nèi)外最具發(fā)展前景的新能源之一。光伏(pv)發(fā)電技術(shù)在國外已得到深入研究和推廣,我國在技術(shù)上也已基本成熟,并已進(jìn)入推廣應(yīng)用階段[1]。但太陽能存在著密度低、間歇性、光照方向和強(qiáng)度隨時(shí)間不斷變化的問題,這就對太陽能的收集和利用裝置提出了更高的要求。目前很多太陽能電池板陣列基本上都是固定的,不能充分利用太陽能資源,發(fā)電效率低下[2]。如果能始終保持太陽能電池板和光照的垂直,使其最大化地接收太陽能,則能充分利用豐富的太陽能資源。據(jù)實(shí)驗(yàn),在太陽能發(fā)電中,相同條件下,采用自動(dòng)跟蹤發(fā)電設(shè)備要比固定發(fā)電設(shè)備的發(fā)電量提高35%左右[3]。因此,設(shè)計(jì)開發(fā)能自動(dòng)追蹤太陽光照的控制系統(tǒng),是非常有價(jià)值的研究課題。
一種新型的可編程邏輯控制器plc(programmable logic controller)的太陽光自動(dòng)跟蹤系統(tǒng),不僅能自動(dòng)根據(jù)太陽光方向來調(diào)整太陽能電池板的朝向,結(jié)構(gòu)簡單、成本低,而且在跟蹤過程中能自動(dòng)記憶和更正不同時(shí)間的坐標(biāo)位置,不必人工干預(yù),特別適合天氣變化比較復(fù)雜和無人值守的情況,有效地提高了太陽能的利用率,有較好的推廣應(yīng)用價(jià)值和市場應(yīng)用前景。本研究以我校的“國家科技部光伏并網(wǎng)發(fā)電示范項(xiàng)目”一期和二期工程作為研究基礎(chǔ)與研究平臺,控制系統(tǒng)發(fā)電功率為75kwp。
2 自動(dòng)跟蹤系統(tǒng)的組成及工作原理
太陽能電池板自動(dòng)跟蹤控制系統(tǒng)由plc主控單元、傳感器和信號處理單元、光伏模塊、電磁機(jī)械運(yùn)動(dòng)控制模塊和電源模塊組成。系統(tǒng)的組成框圖如圖1所示。

圖1 系統(tǒng)組成框圖
太陽能光伏發(fā)電設(shè)備自動(dòng)跟蹤系統(tǒng)的光敏探測頭(傳感器)是用來檢測太陽光強(qiáng)的。當(dāng)有偏差發(fā)生時(shí),偏差信號經(jīng)過跟蹤plc主控單元(控制器),采用模擬差壓比較原理,進(jìn)行運(yùn)算、比較、發(fā)出指令,使電動(dòng)執(zhí)行器動(dòng)作,驅(qū)動(dòng)機(jī)械部分轉(zhuǎn)動(dòng)推動(dòng)整個(gè)裝置旋轉(zhuǎn),調(diào)整偏差,保證太陽能電池方陣正對太陽光,達(dá)到自動(dòng)跟蹤太陽的目的。太陽能電池方陣在陽光的照射下光伏發(fā)電,通過控制器向蓄電池充電。系統(tǒng)配有自動(dòng)保護(hù)線路,當(dāng)風(fēng)力達(dá)到8級時(shí)自動(dòng)啟動(dòng),切斷跟蹤太陽系統(tǒng),使電池方陣快速收平,在風(fēng)力降下來時(shí)延時(shí)10分鐘,解除防風(fēng)系統(tǒng),恢復(fù)跟蹤過程。固定光強(qiáng)、跟蹤光強(qiáng)、電瓶溫度和自然風(fēng)速等由微機(jī)進(jìn)行數(shù)據(jù)采集,并對蓄電池充電和放電進(jìn)行分級控制。
系統(tǒng)有自動(dòng)和手動(dòng)兩種控制方式,sb1和sb2為控制按鈕,用于手動(dòng)操作,plc輸出的q0或q1分別連接到兩個(gè)繼電器線圈,以控制太陽板的正反兩個(gè)運(yùn)動(dòng)方向。在自動(dòng)運(yùn)行模式下,plc首先比較來自信號處理單元的兩個(gè)模擬輸入的值,然后決定輸出q0或者q1。
2.1 可編程邏輯控制器plc單元
跟蹤控制器采用可編程邏輯控制器plc,它是太陽能電池板跟蹤系統(tǒng)的控制核心,是系統(tǒng)研究工作的重點(diǎn)。系統(tǒng)采用歐姆龍(omron)公司近年推出的α系列plc,該機(jī)型為介于大型機(jī)與小型機(jī)之間的中小型機(jī),最大控制i/o點(diǎn)數(shù)為1184點(diǎn)。在應(yīng)用中,中央處理器單元(cpu)采用c200hx-cpu43-e,它自帶一個(gè)編程口和一個(gè)rs232c口,該cpu具有豐富的指令功能,編程十分方便;開關(guān)量輸入模塊選用c200h-id212;開關(guān)量輸出模塊選用c200h-oc225;與上位機(jī)的通訊,通過在cpu中插入通訊板c200hw-com06-e(該板具有一個(gè)rs232c和一個(gè)rs-422/485)實(shí)現(xiàn)遠(yuǎn)程通訊,由于采用了rs-422接口,采取平衡式發(fā)送,因此數(shù)據(jù)傳輸率高,而且串?dāng)_小,傳輸距離可達(dá)500m。特別對串并聯(lián)的并網(wǎng)光伏太陽能電池陣列的跟蹤系統(tǒng)控制,能發(fā)揮plc現(xiàn)場總線控制的優(yōu)勢,進(jìn)行集中控制。經(jīng)過研究和優(yōu)化設(shè)計(jì),應(yīng)用集成標(biāo)準(zhǔn)線路,采用模擬差壓比較原理,控制器具有跟蹤精度高、范圍寬、自動(dòng)返回功能。限位裝置具有東、西、上、下四個(gè)方位的極限限位功能。采用雙重限位控制結(jié)構(gòu),即控制信號限位和驅(qū)動(dòng)電機(jī)限位,保證了設(shè)備可靠地工作。圖2所示為plc輸入/輸出硬件配置圖。
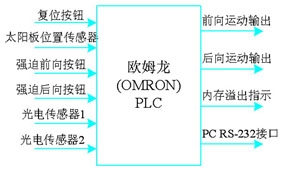
圖2 plc輸入輸出硬件配置圖
2.2 傳感器檢測和信號處理單元
太陽的方位隨著觀測位置和觀測時(shí)間的不同而不同,因此,欲跟蹤太陽就必須先對太陽進(jìn)行檢測定位。檢測太陽光光強(qiáng)的方法有定時(shí)法、坐標(biāo)法、太陽能電池板光強(qiáng)比較法和光敏電阻光強(qiáng)比較法[4]。對這4種控制方法進(jìn)行了對比篩選后認(rèn)為:定時(shí)法電路雖然簡單,但由于季節(jié)的影響,系統(tǒng)的控制精度較差;坐標(biāo)法控制精度較高,但控制電路復(fù)雜;光強(qiáng)比較法使系統(tǒng)的太陽能利用率不能達(dá)到最佳;光敏電阻比較法電路實(shí)現(xiàn)最簡單,對太陽能的利用率最大。基于此,選擇控制精度高和電路易于實(shí)現(xiàn)的光敏電阻光強(qiáng)比較法作為本研究系統(tǒng)的檢測方案。光敏探測頭(傳感器)是太陽能電池板跟蹤系統(tǒng)的光信號接收器,它是利用光敏電阻在光照時(shí)阻值發(fā)生變化的原理,將兩個(gè)完全相同的光敏電阻分別放置于一塊電池板東西方向邊沿處的下方(光與電池板垂直時(shí),一半可接收光,一半在下邊)。如果太陽光垂直照射太陽能電池板時(shí),兩個(gè)光敏電阻接收到的光照強(qiáng)度相同,所以它們的阻值完全相等,此時(shí)電動(dòng)機(jī)不轉(zhuǎn)動(dòng)。當(dāng)太陽光方向與電池板垂直方向有夾角時(shí),接收光強(qiáng)多的光敏電阻阻值減小,驅(qū)動(dòng)電動(dòng)機(jī)轉(zhuǎn)動(dòng),直至兩個(gè)光敏電阻上的光照強(qiáng)度相同。控制靈敏度的高低直接影響跟蹤精度,光敏電阻光強(qiáng)比較法的優(yōu)點(diǎn)在于控制精確,電路設(shè)計(jì)比較容易實(shí)現(xiàn)。經(jīng)過實(shí)驗(yàn)研究,選用質(zhì)量輕、美觀、耐腐蝕的鋁合金材料,光電接收管經(jīng)過嚴(yán)格的計(jì)算、定位,以保證其檢測靈敏度。
圖3所示是太陽光電定位裝置中光電檢測電路的俯視圖,共由9個(gè)光電三極管組成。正中央1個(gè),旁邊8個(gè)圍成一圈。將此檢測板用一不透光的下方開口的圓柱體蓋住,圓柱體的直徑略大于檢測板的外圓。圓柱體的上方中央開一個(gè)與檢測用的光電二極管直徑相同的洞,以便光線通過。將整個(gè)光電檢測裝置安裝在太陽能光電池板上,光電二極管的檢測面與電池板平行。在圓柱體的外面不受圓柱體遮擋的地方(確保會受到光線的照射)也安裝一個(gè)光電二極管,其朝向與圓柱體內(nèi)的光電二極管朝向相同,用于檢測環(huán)境亮度,并與圓柱體內(nèi)的每個(gè)光電二級管及運(yùn)放(可用lm324集成電路中的一個(gè))構(gòu)成一個(gè)比較電路。這樣當(dāng)圓柱體內(nèi)的光電二極管沒有受光線照射時(shí),運(yùn)放將輸出低電平,此電平可接到的輸人端進(jìn)行檢測,圓柱體內(nèi)的每個(gè)光電二級管各用一個(gè)plc的輸入端,共9個(gè)。這樣就可以檢測太陽光線的朝向,來決定哪個(gè)電機(jī)轉(zhuǎn)動(dòng),向哪個(gè)方向轉(zhuǎn)動(dòng)。另外,為了增大光電二極管的檢測范圍,視實(shí)際情況需要,也可再增加一圈緊密排列的光電二極管,外圈的光電二極管與內(nèi)圈的相應(yīng)位置的光電二極管并聯(lián)。
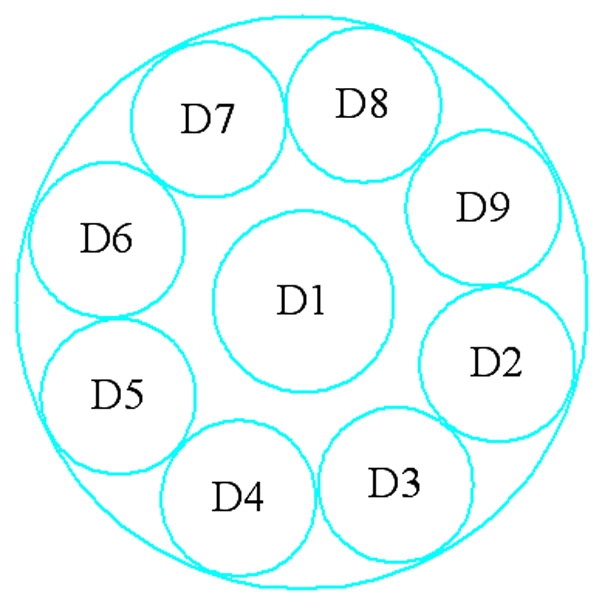
圖3 光電檢測排列
圖4所示為信號處理單元電路,當(dāng)太陽輻射強(qiáng)度增加時(shí),光電電阻阻值減小,1k可變電阻的壓降增加,從而產(chǎn)生與太陽光輻射強(qiáng)度有直接關(guān)系的電壓信號。兩個(gè)傳感器的輸出信號與plc模擬輸入端口連接,并對這兩個(gè)模擬信號進(jìn)行比較運(yùn)算,從而輸出正確的信號,以驅(qū)動(dòng)太陽能電池板跟蹤系統(tǒng)的電磁機(jī)構(gòu)。

圖4 信號處理單元
2.3 光伏模塊
光伏模塊采用三菱光伏智能功率模塊pv-ipm(pm50b4la060),其技術(shù)參數(shù)主要有峰值功率pmax=85w,最佳工作電壓17.5v,這些參數(shù)是在標(biāo)準(zhǔn)的試驗(yàn)條件下測試的(太陽光強(qiáng)度1000w/m3,太陽板溫度25℃,空氣質(zhì)量1.5)。
2.4 電磁機(jī)械運(yùn)動(dòng)控制模塊
抗大風(fēng)自動(dòng)放帆功能,是保證跟蹤發(fā)電裝置,在風(fēng)力達(dá)到一定強(qiáng)度時(shí)防風(fēng)系統(tǒng)啟動(dòng),自動(dòng)調(diào)整受風(fēng)面,避免設(shè)備被風(fēng)吹壞。經(jīng)實(shí)驗(yàn)研究,防風(fēng)傳感器采用德國進(jìn)口產(chǎn)品,防風(fēng)系統(tǒng)采用優(yōu)先工作方式,一旦啟動(dòng)將切斷跟蹤太陽能系統(tǒng),自動(dòng)放帆。
機(jī)械傳動(dòng)機(jī)構(gòu)是跟蹤控制的執(zhí)行機(jī)構(gòu),它不但承受裝置的重量、風(fēng)力,還在室外工作,而且直接影響整機(jī)的精度。經(jīng)研究,水平傳動(dòng)采用電機(jī)、諧波減速機(jī)和兩級蝸輪蝸桿減速機(jī)。仰角傳動(dòng)采用電機(jī)、諧波減速機(jī)和滾珠絲杠,以保證機(jī)械精度和傳動(dòng)效率。
2.5 系統(tǒng)電源模塊
電源電路采用開關(guān)電源設(shè)計(jì),具有高效率、低損耗的特點(diǎn)。采用開關(guān)控制芯片l4960,能提供5.1~40v的輸出電壓和2.5a的輸出電流。電源電路如圖5所示,通過調(diào)整兩個(gè)電阻r3和r4,以產(chǎn)生12~24v直流電壓,24v(dc)用于plc電源,44v(dc)直接取自整流橋側(cè)供給直流電機(jī)。如果用于光伏逆變系統(tǒng)的跟蹤系統(tǒng),220v(ac)可以直接取自光伏逆變電源。
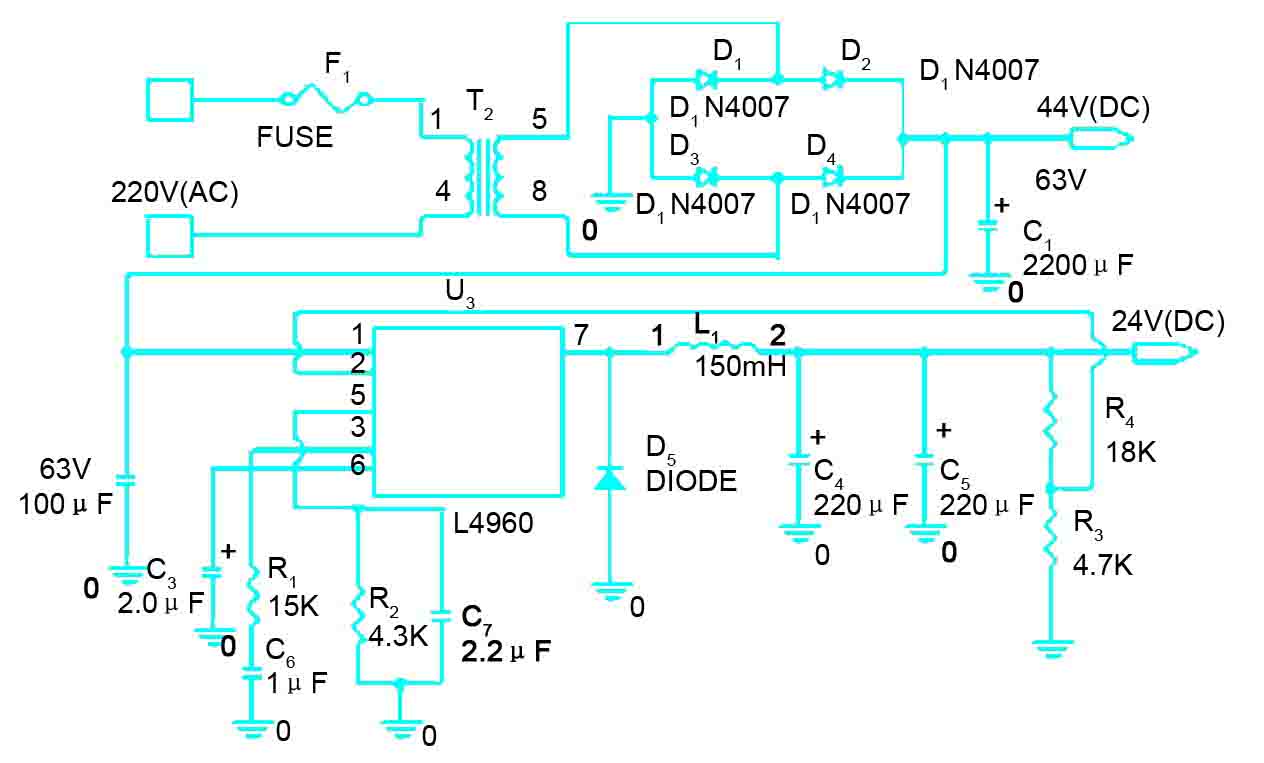
圖5 開關(guān)電源設(shè)計(jì)
3 光伏系統(tǒng)軟件設(shè)計(jì)
并網(wǎng)光伏發(fā)電系統(tǒng)控制軟件采用模塊化設(shè)計(jì),包括plc控制和監(jiān)控程序、pc監(jiān)控和數(shù)據(jù)處理程序兩個(gè)主要部分。
3.1 plc控制和監(jiān)控程序
plc控制語句是整個(gè)太陽能電池板跟蹤系統(tǒng)的重要組成部分,軟件編程采用歐姆龍公司的cx-programmer 7.1,cx-p梯形圖編程支持軟件為使用者提供了從操作界面到程序注釋的全中文操作環(huán)境,支持windows的拖拉及粘貼操作,以及完備的檢索功能和常用標(biāo)準(zhǔn)位簡易輸入功能,為使用者創(chuàng)造了一個(gè)高效的編程操作環(huán)境。通過計(jì)算機(jī)的rs-232c口與plc的rs-232c口連接,對plc進(jìn)行數(shù)據(jù)實(shí)時(shí)監(jiān)控、修改和在線編輯等,方便地把程序傳遞到plc中或從plc中讀出數(shù)據(jù)。plc主要完成如下工作:
(1) 控制跟蹤系統(tǒng)的運(yùn)動(dòng),控制邏輯如圖6所示。
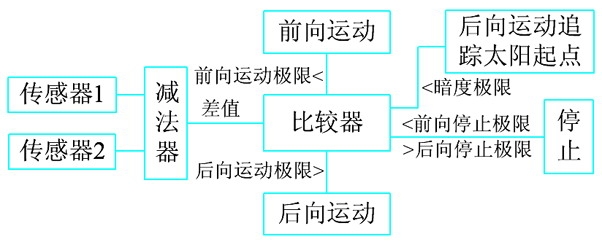
圖6 控制過程的邏輯順序
(2) 此子程序是將plc輸入與輸出狀態(tài)復(fù)制到內(nèi)存的特定位置,稱為標(biāo)記區(qū)域,pc監(jiān)控程序能隨時(shí)直接從內(nèi)存區(qū)域讀取輸入和輸出狀態(tài)。
(3) 采樣數(shù)據(jù)存儲。這是一個(gè)在線采集存儲過程,通過ram數(shù)據(jù)存儲內(nèi)部的特殊矩陣,每一小時(shí)讀取光敏電阻的值。數(shù)據(jù)采集白天進(jìn)行,晚上停止,直到第二天日出。采集的時(shí)間(小時(shí)和分鐘)存儲在不同的矩陣,然后在pc機(jī)的屏幕上顯示出來。當(dāng)ram內(nèi)存滿時(shí),將不再存儲數(shù)據(jù),直到復(fù)位操作將存儲數(shù)據(jù)清除。這部分程序采用順序功能圖表(sequential functioning chart,sfc)進(jìn)行編程,算法如圖7所示。

圖7 存儲過程順序功能圖
3.2 pc監(jiān)控和數(shù)據(jù)處理程序
采用面向?qū)ο蟮母呒壘幊陶Z言visual basic 6.0實(shí)現(xiàn)以下功能:
(1) 自動(dòng)檢測pc機(jī)rs232串口和plc端口的連接狀態(tài)。
(2) 系統(tǒng)監(jiān)控。決定光伏模塊的實(shí)際位置和運(yùn)動(dòng)方向,顯示光敏電阻的讀數(shù),以及內(nèi)存溢出標(biāo)記。
(3) 模塊的強(qiáng)制性前向和反向運(yùn)動(dòng)。通過程序界面,發(fā)出指令控制plc操作。如果出現(xiàn)系統(tǒng)位置異常,可強(qiáng)迫太陽板按照操作要求恢復(fù)初始位置。
(4) 顯示系統(tǒng)設(shè)置。顯示存儲在plc內(nèi)存中的太陽跟蹤系統(tǒng)的設(shè)置,如前向和反向運(yùn)動(dòng)極限,光線暗度極限,前向和反向停止極限,以及對這些參數(shù)設(shè)置可直接進(jìn)行修改。
4 結(jié)束語
本研究基于歐姆龍plc,采用光敏電阻比較法,構(gòu)建了自動(dòng)跟蹤系統(tǒng)模型,使太陽能電池板自動(dòng)保持與太陽光垂直。太陽能電池板自動(dòng)跟蹤太陽光并網(wǎng)發(fā)電系統(tǒng)的研究,有效地提高了太陽能的利用率和光伏發(fā)電系統(tǒng)的效率,增加了全年的發(fā)電功率輸出,從整體上降低了光伏并網(wǎng)發(fā)電的成本,符合構(gòu)建環(huán)保型和節(jié)能型社會發(fā)展的要求,具有很高的經(jīng)濟(jì)效益,并能產(chǎn)生良好的社會影響,具有理論研究意義和應(yīng)用推廣前景。基于plc的太陽能電池板跟蹤系統(tǒng)能用于獨(dú)立的太陽能光伏發(fā)電,也能應(yīng)用于串/并聯(lián)的并網(wǎng)光伏發(fā)電系統(tǒng)的現(xiàn)場總線控制,具有良好的應(yīng)用前景。