摘 要:
隨著被測(cè)目標(biāo)速度和加速度的提高,對(duì)光電跟蹤伺服系統(tǒng)的快速捕獲能力也提出了越來(lái)越高的要求。采用經(jīng)典控制方法不能完全滿足工程需求。本文設(shè)計(jì)了一種比例因子自調(diào)整二維模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器" title="模糊控制器">模糊控制器加入到光電跟蹤伺服系統(tǒng)中。仿真結(jié)果表明,伺服系統(tǒng)的動(dòng)態(tài)性能有了很大的提高。
引 言:
近年來(lái),人們廣泛的將模糊控制技術(shù)應(yīng)用于生產(chǎn)生活各個(gè)領(lǐng)域。它以其不依靠被控對(duì)象的精確數(shù)學(xué)模型、適應(yīng)性好、系統(tǒng)魯棒性好以及易于實(shí)現(xiàn)無(wú)超調(diào)控制[1]而受到業(yè)內(nèi)人士青睞。尤其是二維模糊控制器,以其設(shè)計(jì)相對(duì)簡(jiǎn)單,控制精度較高而備受矚目。本文在經(jīng)典控制方法的基礎(chǔ)上,加入比例因子自調(diào)整二維模糊控制器構(gòu)成一種伺服控制系統(tǒng)模型,通過(guò)編寫(xiě)M文件的S函數(shù)來(lái)進(jìn)行經(jīng)典控制方法和模糊控制器之間的切換,仿真結(jié)果表明,光電跟蹤伺服系統(tǒng)的動(dòng)態(tài)性能有很大改善。
一、光電跟蹤伺服系統(tǒng)的數(shù)學(xué)模型
光電跟蹤伺服系統(tǒng)屬于雙閉環(huán)單輸入單輸出位置隨動(dòng)系統(tǒng),內(nèi)環(huán)為速度環(huán),外環(huán)為位置環(huán)。本文針對(duì)的控制對(duì)象是光電跟蹤系統(tǒng)轉(zhuǎn)臺(tái),其傳遞函數(shù)是:
![]()
速度環(huán)和位置環(huán)的控制器利用超前-滯后補(bǔ)償方法設(shè)計(jì),閉環(huán)系統(tǒng)的主要組成環(huán)節(jié)可以參見(jiàn)參考文獻(xiàn)[2],這里不再詳述。
二、模糊控制器設(shè)計(jì)
控制系統(tǒng)工具箱(Control System Toolbox)是MATLAB軟件包中的專(zhuān)門(mén)針對(duì)控制系統(tǒng)工程設(shè)計(jì)的函數(shù)和工具的集合。該工具箱提供了豐富的算法程序以完成一般控制系統(tǒng)的設(shè)計(jì)、分析和建模
SIMULINK是用來(lái)建模、分析和仿真各種動(dòng)態(tài)系統(tǒng)的交互環(huán)境,通過(guò)SIMULINK提供的豐富功能塊,可以迅速地創(chuàng)建動(dòng)態(tài)系統(tǒng)模型。模糊邏輯工具箱,利用基于模糊邏輯的系統(tǒng)設(shè)計(jì)工具,通過(guò)GUI,可以完成模糊控制推理系統(tǒng)設(shè)計(jì)的全過(guò)程,利用簡(jiǎn)單的模糊規(guī)則對(duì)復(fù)雜的系統(tǒng)行為進(jìn)行建模,然后將這些規(guī)則應(yīng)用于模糊推理系統(tǒng);S函數(shù)是SIMIULINK提供的一種功能強(qiáng)大的編程機(jī)制,通過(guò)S-function用戶可以實(shí)現(xiàn)用戶自己的算法。
1、模糊控制輸入變量的設(shè)計(jì)和選擇
系統(tǒng)中的模糊控制器采用雙輸入單輸出型控制器。輸入變量為偏差信號(hào)E和偏差變化率EC。輸出變量為控制量U。E、EC、U的量化論域均為(-6 6),模糊子集均為{NB,NM,NS,ZO,PS,PM,PB}。在MATLAB主界面命令窗口中鍵入FUZZY命令,將進(jìn)入模糊控制器的圖形用戶界面FIS編輯器,分別建立E、EC、U的隸屬度函數(shù)。這里選用三角形(trimf)隸屬度函數(shù)。
2、模糊控制規(guī)則的建立
模糊控制規(guī)則有兩種方法:經(jīng)驗(yàn)歸納法和推理合成法,本文中采用的是經(jīng)驗(yàn)歸納法。
模糊控制規(guī)則的建立遵循以下原則:
當(dāng)偏差為正向較大且偏差變化為正向較大時(shí),控制量U的輸出應(yīng)為正向較大;
當(dāng)偏差為正向較小或零且誤差變化為正向較小或零時(shí),控制量U的輸出應(yīng)為正向較小或零;
當(dāng)偏差為負(fù)向較小且誤差變化為較小時(shí),控制量U的輸出應(yīng)為負(fù)向較小;
當(dāng)偏差為負(fù)向較大且偏差變化為負(fù)向較大時(shí),控制量U的輸出應(yīng)為負(fù)向較大。
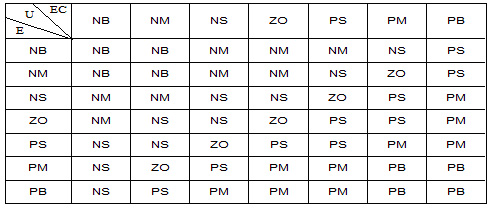
在FIS編輯器中設(shè)計(jì)模糊控制規(guī)則,如表一所示:
表一 光電跟蹤伺服系統(tǒng)的模糊控制規(guī)則表
Table.1 Fuzzy control rule table of opto-electronic tracking servo system
![]()
三、帶有二維模糊控制器的光電跟蹤伺服系統(tǒng)仿真模型簡(jiǎn)介:
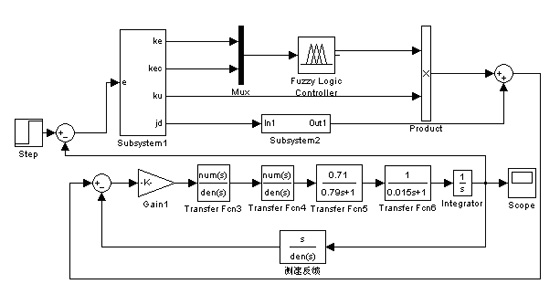
如圖一所示,光電跟蹤伺服系統(tǒng)是雙環(huán)隨動(dòng)系統(tǒng),他由速度環(huán)和位置環(huán)構(gòu)成,在位置環(huán)上,模糊控制器和常規(guī)經(jīng)典控制器被設(shè)計(jì)成按系統(tǒng)偏差大小進(jìn)行分段控制。
圖一 帶有自調(diào)整因子二維模糊控制器的光電跟蹤伺服系統(tǒng)SIMULINK仿真模型
Fig.1 simulation model of SIMULINK of opto-electronic tracking servo system with self-tuning two-dimension fuzzy controller
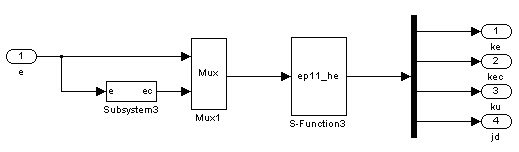
圖二 Subsystem1的SIMIULINK仿真模型
Fig.2 simulation model of SIMULINK of Subsystem1
Subsystem1子系統(tǒng)如圖二所示,偏差E和EC是S-函數(shù)的兩個(gè)輸入,S-函數(shù)的輸出是比例因子Ke、Kec和Ku還有位置環(huán)常規(guī)控制器的輸入jd。
應(yīng)用S-函數(shù)ep11_he.m能實(shí)現(xiàn)兩種控制器之間的切換,切換點(diǎn)選取為0.1。當(dāng)系統(tǒng)偏差絕對(duì)值大于切換點(diǎn)時(shí),為模糊控制器工作,使系統(tǒng)偏差迅速減小;小于切換點(diǎn)時(shí),Subsystem1子系統(tǒng)的jd端口輸出為e,常規(guī)控制器控制工作,保證系統(tǒng)控制精度[3]。ep11_he.m對(duì)模糊控制器的兩個(gè)輸入E和EC的比例因子Ke和Kec進(jìn)行配置。由于比例因子Ke和Kec的取值對(duì)光電跟蹤伺服控制系統(tǒng)的動(dòng)態(tài)性能影響很大。Ke選取較大,系統(tǒng)的超調(diào)量也較大,過(guò)渡過(guò)程較長(zhǎng),但上升時(shí)間變短;Kec的取值越大,系統(tǒng)超調(diào)量越小,但系統(tǒng)的響應(yīng)速度變慢,同時(shí),模糊控制器輸出比例因子Ku選擇過(guò)小將導(dǎo)致動(dòng)態(tài)過(guò)程變長(zhǎng),過(guò)大又會(huì)使系統(tǒng)振蕩[4]。按照這一規(guī)律(經(jīng)過(guò)仿真試驗(yàn)驗(yàn)證),在S-函數(shù)ep11_he.m中,特別將兩個(gè)輸入E和EC分別與兩個(gè)輸入比例因子Ke和Kec聯(lián)系,使Ke和Kec隨著E和EC的變化而變化,當(dāng)偏差較大時(shí),Ke取較大值,系統(tǒng)上升時(shí)間變短,響應(yīng)速度較快;當(dāng)偏差較小時(shí),Ke應(yīng)為較小值,使系統(tǒng)超調(diào)下降;同樣,對(duì)于偏差變化可以使之與EC建立聯(lián)系,在系統(tǒng)響應(yīng)的上升時(shí)間里,保持較大值,以減小系統(tǒng)超調(diào)量;當(dāng)EC較小時(shí),Kec的值迅速減小,系統(tǒng)保持較快的響應(yīng)速度。ep11_he.m中對(duì)于Ku的取值原則,在系統(tǒng)響應(yīng)的上升狀態(tài)中,使Ku取較大的值,減小系統(tǒng)的動(dòng)態(tài)過(guò)程時(shí)間;當(dāng)系統(tǒng)E和EC比較小時(shí),Ku取較小的值,避免系統(tǒng)振蕩。
四、結(jié)果分析:
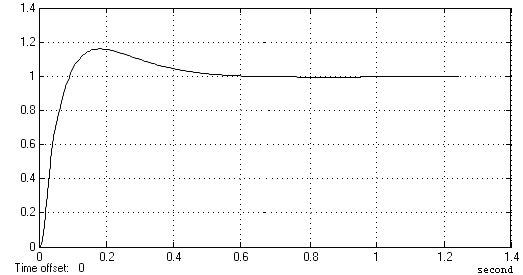
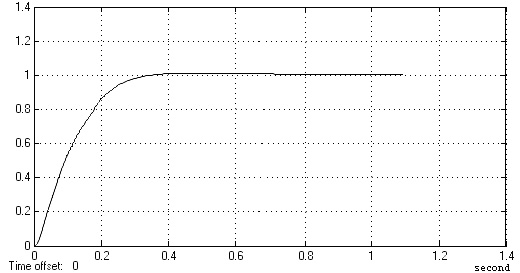
經(jīng)過(guò)仿真,得到常規(guī)控制器階躍響應(yīng)曲線(圖三)和帶有二維模糊控制控制器的光電跟蹤伺服系統(tǒng)(圖四、圖五)的階躍響應(yīng)曲線如下:
圖三 光電跟蹤伺服系統(tǒng)經(jīng)典控制器的階躍響應(yīng)曲線
Fig.3 step response of classic control of opto-electronic tracking servo system
圖四 帶有二維模糊控制器的光電跟蹤伺服系統(tǒng)階躍響應(yīng)曲線
Fig.4 step response of opto-electronic tracking servo system with two-dimension fuzzy control
圖五 帶有自調(diào)整因子二維模糊控制器光電跟蹤伺服系統(tǒng)的階躍響應(yīng)曲線
Fig.5 step response of opto-electronic tracking servo system with self-tuning two-dimension fuzzy control
對(duì)比帶有自調(diào)整因子的二維模糊控制器光電跟蹤伺服系統(tǒng)(圖五)、經(jīng)典控制器和一般二維模糊控制器的階躍響應(yīng)曲線(如圖三,圖四)可以得出,自調(diào)整因子二維模糊控制器和經(jīng)典控制器(它的超調(diào)較大、高于15%,調(diào)節(jié)時(shí)間以達(dá)到±5%為準(zhǔn)大于0.4秒)和一般二維模糊控制器(它的超調(diào)為1.2%,調(diào)節(jié)時(shí)間以達(dá)到+-5%為準(zhǔn),約0.3秒)相比,它的超調(diào)量較小,為0.6%,調(diào)節(jié)時(shí)間以達(dá)到±5%為準(zhǔn),為0.04秒,仿真表明加入比例因子自調(diào)整二維模糊控制器的光電跟蹤伺服系統(tǒng)具有更好的動(dòng)態(tài)性能。
