
被譽(yù)為“鉆井導(dǎo)彈與制導(dǎo)技術(shù)”的旋轉(zhuǎn)導(dǎo)向鉆井是一項(xiàng)涉及多學(xué)科的高新科技尖端技術(shù)。它具有機(jī)械鉆速和井身軌跡控制精度高、位移延伸能力強(qiáng)等特點(diǎn),且可以有效地克服滑動(dòng)導(dǎo)向工具給系統(tǒng)帶來(lái)的摩擦阻力過(guò)大和井眼清清等問(wèn)題,其中穩(wěn)定平臺(tái)的控制是旋轉(zhuǎn)導(dǎo)向鉆井系統(tǒng)的關(guān)鍵。雖然傳統(tǒng)的PID控制對(duì)固定輸入已有很好的控制效果,但鉆井過(guò)程中的鉆井液脈沖壓力不可能保持固定值,由此會(huì)帶來(lái)過(guò)程對(duì)象模型的某些不確定性。因此,設(shè)計(jì)中充分考慮到系統(tǒng)的魯棒性和自適應(yīng)性需在控制中加入智能控制以保證系統(tǒng)的性能指標(biāo)。根據(jù)工程上對(duì)穩(wěn)定平臺(tái)的要求,這里提出了采用前饋模糊控制算法控制穩(wěn)定平臺(tái)系統(tǒng)的設(shè)計(jì)方案,試驗(yàn)結(jié)果表明該控制方法抗干擾能力強(qiáng)、魯棒性好。
2 穩(wěn)定平臺(tái)前饋模糊控制系統(tǒng)原理
旋轉(zhuǎn)導(dǎo)向鉆井工具的穩(wěn)定平臺(tái)是整個(gè)導(dǎo)向工具中的關(guān)鍵。穩(wěn)定平臺(tái)可以不受鉆桿旋轉(zhuǎn)的影響而相對(duì)穩(wěn)定于一個(gè)給定角度,從而使旋轉(zhuǎn)導(dǎo)向系統(tǒng)能夠在鉆柱、工具和導(dǎo)向塊旋轉(zhuǎn)時(shí),鉆井工具穩(wěn)定跟蹤預(yù)置的鉆井軌跡,實(shí)現(xiàn)斜井和水平井的鉆采目。旋轉(zhuǎn)導(dǎo)向鉆井穩(wěn)定平臺(tái)前饋控制的原理圖如圖l所示。

圖1中,G1(s)為模糊控制器;G2(s)為PID控制;G3(s)為下發(fā)電機(jī)的傳遞甬?dāng)?shù);Gd(s)和Gf(s)為系統(tǒng)引入的前饋環(huán)節(jié),其中:Gd(s)為前饋調(diào)節(jié)器函數(shù),Gf(s)為干擾通道的傳遞函數(shù);H1(s)為位置反饋通道傳遞函數(shù);H2(s)為速度反饋通道傳遞函數(shù)。這樣既能保證平臺(tái)隨動(dòng)的精度,又能使穩(wěn)定平臺(tái)有較強(qiáng)的自適應(yīng)性。
3 模糊控制器的設(shè)計(jì)
3.1 模糊控制器的基本結(jié)構(gòu)
由于鉆井工程中存在大量井下參數(shù)以及其嚴(yán)重的復(fù)雜性和不確定性,欲提高旋轉(zhuǎn)導(dǎo)向鉆井穩(wěn)定平臺(tái)系統(tǒng)的控制功能,需引入模糊控制器。根據(jù)旋轉(zhuǎn)導(dǎo)向鉆井穩(wěn)定平臺(tái)控制系統(tǒng)對(duì)精度和實(shí)時(shí)性要求,該設(shè)計(jì)采用雙輸入單輸出的二維模糊控制器。模糊控制器的結(jié)構(gòu)原理如圖2所示。該控制器是一個(gè)兩輸入、單輸出的模糊控制器,其中E和Ec為模糊控制器輸入,u為模糊控制器輸出,通過(guò)模糊控制規(guī)則控制u,以滿足不同時(shí)刻E和Ec的要求。

3.2 模糊控制器控制規(guī)則
取偏差角α為偏差E,轉(zhuǎn)速ω為偏差變化Ec,取扭矩發(fā)生器驅(qū)動(dòng)電壓信號(hào)為輸出u。根據(jù)不同的α及ω系統(tǒng)控制u。在導(dǎo)向鉆井工具運(yùn)行時(shí),系統(tǒng)的轉(zhuǎn)速ω和偏差角α輸入數(shù)據(jù)分別為測(cè)量系統(tǒng)的角速度和角位置信號(hào)。偏差角的值為操作命令指定所給定的角位置和姿態(tài)測(cè)量傳感器的實(shí)際角位置之差。因此,模糊控制器控制規(guī)則如下:
(1)當(dāng)轉(zhuǎn)速較大時(shí),只做降速控制,不考慮實(shí)時(shí)角位置的測(cè)量值。因?yàn)榧词故瞧罱堑扔诹銜r(shí),只要轉(zhuǎn)速不等于零,系統(tǒng)的動(dòng)態(tài)過(guò)程就未結(jié)束。
(2)當(dāng)轉(zhuǎn)速為零時(shí),系統(tǒng)只按偏差角調(diào)整。使對(duì)象根據(jù)α從規(guī)定方向趨近給定角。
(3)當(dāng)轉(zhuǎn)速較小時(shí),需根據(jù)ω、α綜合考慮控制輸出的變化。需要注意這兩個(gè)量之間的符號(hào)關(guān)系,即就是:ω和α同號(hào)時(shí),旋轉(zhuǎn)運(yùn)動(dòng)正在使偏差角增加,控制量輸出應(yīng)與輸入反號(hào)且盡可能取較大值。使對(duì)象盡快在該轉(zhuǎn)向半周內(nèi)使ω為零甚至反向;若ω和α反號(hào),說(shuō)明現(xiàn)在偏差角減少,可以利用小轉(zhuǎn)速轉(zhuǎn)動(dòng),提高對(duì)象響應(yīng)時(shí)間來(lái)減少降速。降速的減少可根據(jù)系統(tǒng)的多個(gè)動(dòng)態(tài)指標(biāo)綜合調(diào)整。隨著α的減少,可適當(dāng)增加一些減速作用以減少超調(diào)角度。
系統(tǒng)工作時(shí),系統(tǒng)將根據(jù)輸入的α和ω來(lái)查詢模糊控制規(guī)則表,從而自動(dòng)決定輸出u的大小。
3.3 基于模糊控制器的設(shè)計(jì)
設(shè)計(jì)ω,α和u的論域界定為7個(gè)等級(jí)。語(yǔ)言模糊集取NL,NM,NS,ZE,PS,PM,PL,含義分別為:負(fù)大、負(fù)中、負(fù)小、零、正小、正中、正大。3個(gè)量均選用三角形隸屬度函數(shù),且均采用線性劃分,其中ω的實(shí)際論域?yàn)?plusmn;120 r/m,α的實(shí)際論域?yàn)?plusmn;180°,u的實(shí)際論域需根據(jù)系統(tǒng)響應(yīng)的靈敏度和穩(wěn)定性等指標(biāo)綜合調(diào)整確定。控制器模擬推理采用較簡(jiǎn)單的Mandani算法。
4 系統(tǒng)仿真實(shí)驗(yàn)
該系統(tǒng)設(shè)計(jì)的控制對(duì)象為下發(fā)電機(jī),其傳遞函數(shù)為G(s)=Km/(Tms+1),其中Km是廣義對(duì)象總的放大系數(shù),等效時(shí)間常數(shù)Tm主要取決于平臺(tái)本身轉(zhuǎn)動(dòng)的摩擦系數(shù)和轉(zhuǎn)動(dòng)慣量等機(jī)械參數(shù)。Km=1/f,Tm=J/f,其中f為平臺(tái)轉(zhuǎn)動(dòng)摩擦系數(shù),J為平臺(tái)轉(zhuǎn)動(dòng)慣量。
在系統(tǒng)設(shè)計(jì)中,取J=0.01l kg·m2,取鋼對(duì)鋼的動(dòng)摩擦系數(shù)f=0.15。可得到Km=6.67,Tm=0.073。即傳遞函數(shù)為:
G(s)=6.67/(0.073 s+1) (1)
圖3為前饋模糊控制系統(tǒng)仿真框圖。
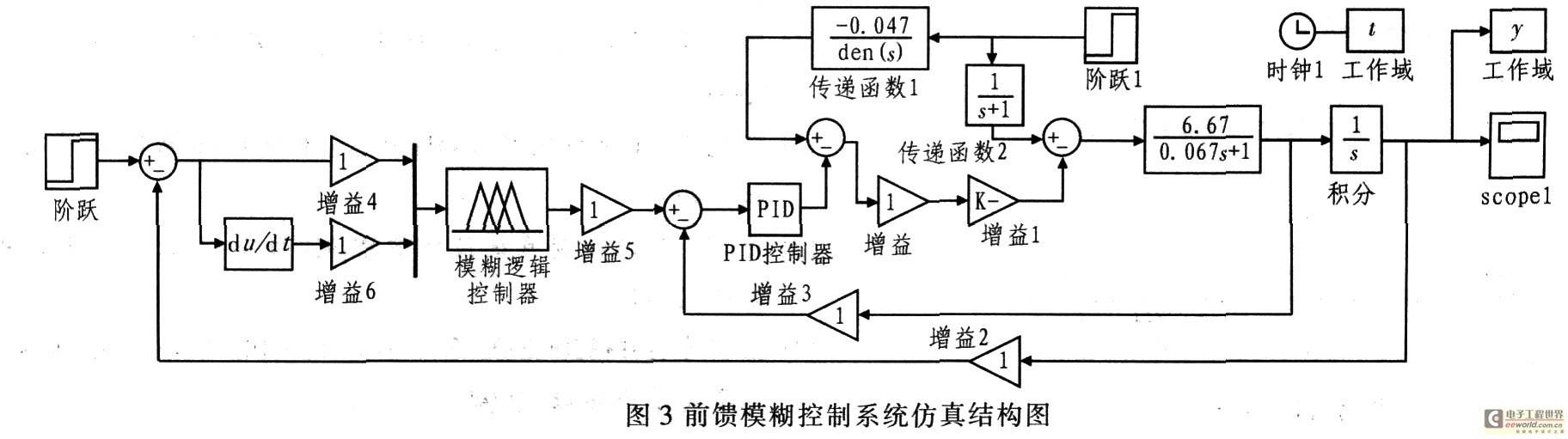
4.1 系統(tǒng)性能仿真分析
在MATLAB軟件中,用FUZZY工具箱按照模糊控制器的控制規(guī)則構(gòu)造模糊控制器,在Simulink中組建如圖3所示的穩(wěn)定平臺(tái)前饋模糊控制系統(tǒng)的Simulink仿真模型。
為了突出所采用的前饋模糊控制算法的優(yōu)越性,還對(duì)比了采用前饋PID控制算法,通過(guò)仿真比較它們的控制性能。其仿真結(jié)果如圖4所示。
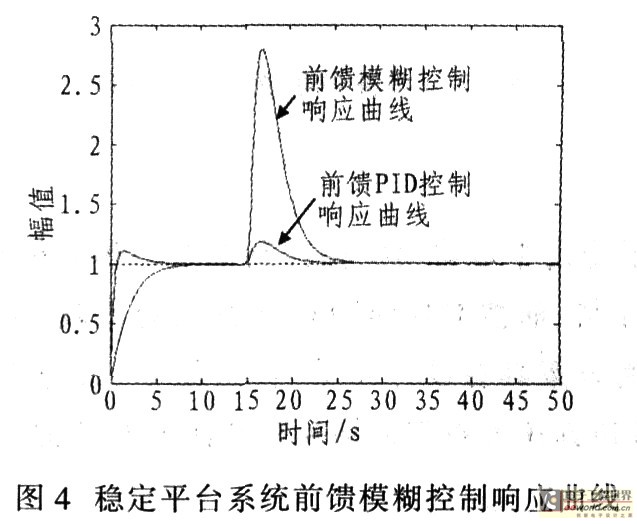
由圖4明顯發(fā)現(xiàn):前饋模糊控制方式控制性能較好,前饋PID控制的響應(yīng)速度雖快,但是其抗擾動(dòng)能力相對(duì)較差.在相同擾動(dòng)的情況下,其超調(diào)量過(guò)大,系統(tǒng)出現(xiàn)明顯的波動(dòng)。而前饋模糊控制,在無(wú)擾動(dòng)信號(hào)時(shí),系統(tǒng)未出現(xiàn)明顯超調(diào),而系統(tǒng)運(yùn)行穩(wěn)定后加相同擾動(dòng),系統(tǒng)也未出現(xiàn)明顯波動(dòng),并能夠很快進(jìn)入穩(wěn)定運(yùn)行狀態(tài),抗干擾能力明顯加強(qiáng)。由此可見(jiàn),前饋模糊控制具有響應(yīng)速度快,抗干擾能力強(qiáng)的特點(diǎn),因此采用前饋模糊控制穩(wěn)定平臺(tái)系統(tǒng)可有效提高系統(tǒng)動(dòng)態(tài)響應(yīng)。穩(wěn)定平臺(tái)串級(jí)模糊控制系統(tǒng)的實(shí)際使用中,改變系統(tǒng)模型參數(shù)后系統(tǒng)響應(yīng)曲線基本重合,如圖5所示。說(shuō)明前饋模糊控制的導(dǎo)向鉆井穩(wěn)定平臺(tái)有很好的自適應(yīng)性和魯棒性。
4.2 前饋模糊控制抗擾動(dòng)性仿真
鉆井時(shí)井下情況復(fù)雜,除了工具自身產(chǎn)生的模型參數(shù)變化外,其他各種各樣的擾動(dòng)隨時(shí)都有可能產(chǎn)生,如鉆機(jī)憋鉆、卡鉆、巖層性質(zhì)導(dǎo)致鉆頭受力不均,鉆井液壓力、排量波動(dòng)等。為了測(cè)試前饋模糊控制的抗擾動(dòng)性,分別以常數(shù)信號(hào)、脈沖信號(hào)、產(chǎn)生正態(tài)分布的隨機(jī)信號(hào)代表各種擾動(dòng),對(duì)系統(tǒng)進(jìn)行抗干擾能力的仿真研究。仿真結(jié)果如圖6所示。仿真表明,采用前饋模糊控制穩(wěn)定平臺(tái)系統(tǒng)能達(dá)到很好的控制要求,針對(duì)多種干擾,系統(tǒng)的波動(dòng)很小,能夠很快進(jìn)入穩(wěn)定運(yùn)行狀態(tài),控制效果良好。


5 結(jié)語(yǔ)
建立了穩(wěn)定平臺(tái)前饋模糊控制系統(tǒng)的仿真模型,通過(guò)對(duì)前饋模糊控制、前饋PID兩種控制方式的比較,實(shí)驗(yàn)得出前饋模糊控制方案具有設(shè)計(jì)簡(jiǎn)單、算法簡(jiǎn)單、系統(tǒng)魯棒性強(qiáng)等特點(diǎn)。通過(guò)仿真還可看到前饋模糊控制能有效抑制各種不確定性的干擾因素。這種控制器結(jié)構(gòu)簡(jiǎn)單,易于實(shí)現(xiàn),而且結(jié)果精度較高。從而驗(yàn)證了前饋模糊控制算法在導(dǎo)向鉆井穩(wěn)定平臺(tái)控制系統(tǒng)中的可行性。