作 者:華北電力大學(xué) 控制與計(jì)算機(jī)工程學(xué)院 / 姜棟棟
1 引言
在工業(yè)控制領(lǐng)域中,單片機(jī)作為控制器件,其顯著特點(diǎn)是高性能、高速度、低功耗、價(jià)格低,編程簡(jiǎn)單,但是其可靠性和搞干擾性比較弱,特別是在強(qiáng)電和惡劣的運(yùn)行環(huán)境下,要保證可靠性和安全性,需要采取極為完善的搞干擾措施,這些都給工程的設(shè)計(jì)的難度和費(fèi)用帶來的負(fù)擔(dān)。近年隨著工業(yè)自動(dòng)化控制的高要求以微電子、計(jì)算機(jī)、通信技術(shù)的發(fā)展示,可程編程邏輯控制器(plc)是作為一種專為工業(yè)環(huán)境下使用的數(shù)字運(yùn)算操作的電子系統(tǒng)應(yīng)運(yùn)而生它是以嵌入式cpu為核心,加上其它所需的輸入、輸出擴(kuò)展模塊和通訊模塊可取代傳統(tǒng)氣動(dòng)或電氣控制完成開關(guān)量的模擬量的順序控制,按照邏輯條件進(jìn)預(yù)先設(shè)計(jì)好的順序動(dòng)作,并按照邏輯關(guān)系進(jìn)行故障保護(hù)動(dòng)作的控制。將plc技術(shù)運(yùn)用于現(xiàn)代串級(jí)調(diào)速技術(shù),可明顯改善調(diào)速的性能和減小全速和調(diào)速時(shí)故障的發(fā)生率。
2 現(xiàn)代串級(jí)調(diào)速的概述
現(xiàn)代串級(jí)調(diào)速技術(shù)是引入整流環(huán)節(jié)、斬波環(huán)節(jié)和逆變環(huán)節(jié),通過調(diào)節(jié)斬波環(huán)節(jié)的占空比來改變逆變器兩端電勢(shì)的大小,因?yàn)榇穗妱?shì)與轉(zhuǎn)子側(cè)電勢(shì)串聯(lián)并且電勢(shì) 與轉(zhuǎn)子側(cè)的電勢(shì)相反,所以改變了轉(zhuǎn)子側(cè)總電勢(shì)的大小,進(jìn)而改變了轉(zhuǎn)子側(cè)電流,最終改變了電機(jī)的轉(zhuǎn)速。現(xiàn)代串級(jí)調(diào)速技術(shù)主要分為外反饋式和內(nèi)反饋式,外所饋式主要工作原理是使用逆變變壓器將轉(zhuǎn)差功率吸收并回饋至電網(wǎng),其原理如圖1所示。
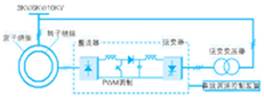
圖1 外反饋式串級(jí)調(diào)速
內(nèi)反饋式串級(jí)調(diào)速技術(shù)是在電動(dòng)機(jī)定子繞組嵌槽中同槽嵌放一個(gè)反饋繞組,則定子鐵芯中的反饋繞組和定子繞組構(gòu)成并代替了逆變變壓器,將轉(zhuǎn)差功率通過反饋繞組及定子繞組吸收并回饋至電網(wǎng),其原理如圖2所示。
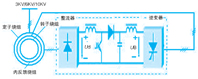
圖2 內(nèi)反饋式串級(jí)調(diào)速
3plc在內(nèi)反饋串級(jí)調(diào)速系統(tǒng)中的應(yīng)用
3.1 plc的選擇
因plc具有編程簡(jiǎn)單、功能強(qiáng)、性價(jià)比高、硬件配套齊全,易用性強(qiáng)、可靠性高、搞干擾能力強(qiáng)和系統(tǒng)設(shè)計(jì)安裝和調(diào)試工作量小的優(yōu)點(diǎn),所以將其應(yīng)用于現(xiàn)代串級(jí)調(diào)速系統(tǒng)中具有明顯的優(yōu)勢(shì)。由于串級(jí)控制系統(tǒng)的檢測(cè)點(diǎn)以及控制量較多,是一個(gè)大規(guī)模的測(cè)控系統(tǒng),因此此次選用西門子公司s7-200系列的cpu224作為系統(tǒng)的控制器。該plc具有14輸入/10輸出共24個(gè)數(shù)字量i/o點(diǎn)、可連接7個(gè)擴(kuò)展模塊、最大可擴(kuò)展168路數(shù)字量i/o點(diǎn)以及兼容ppi,m pi和自由方式的通訊協(xié)議等優(yōu)點(diǎn),因此它是一個(gè)具有較強(qiáng)控制能力的控制器。
另外選用西門子公司的s7-200系列的cpu224ac/dc/繼電器型plc,而沒有選擇晶體管輸出,是因?yàn)槔^電器輸出型有以下優(yōu)點(diǎn):
(1) 繼電器輸出型是隔離輸出,即觸點(diǎn)跟線圈不共地,只要外加線路電路不超過plc繼電器的額定電流就可以了;晶體管輸出就有點(diǎn)麻煩,除了要考慮電流問題外,還要考慮電壓是直流的,地要接對(duì),要考慮是npn還是pnp輸出等問題。
(2) 繼電器輸出型是令cpu驅(qū)動(dòng)繼電器線圈,令觸點(diǎn)吸合,使外部電源通過閉合的觸點(diǎn)驅(qū)動(dòng)外部負(fù)載,可帶較大的外部負(fù)載;而晶體管輸出型是令cpu通過光耦合使晶體管通斷,以控制外部直流負(fù)載,可帶外部負(fù)載小,有時(shí)候要加其他東西來帶動(dòng)大負(fù)載(如繼電器,固態(tài)繼電器等)。
3.2 基于plc的內(nèi)反饋串級(jí)調(diào)速系統(tǒng)
基于plc內(nèi)反饋串級(jí)調(diào)速系統(tǒng)原理如圖3所示,此次設(shè)計(jì)的調(diào)速系統(tǒng)主要是采用plc控制去控制系統(tǒng)中的開關(guān)1km、2km、3km、4km和接入的水阻,在調(diào)速系統(tǒng)處于不同功能狀態(tài)和用戶要求時(shí)采取相應(yīng)的動(dòng)作,當(dāng)啟動(dòng)電機(jī)時(shí)先讓plc控制水阻電機(jī)讓其緩慢增大到最大水阻值,然后合1km使電機(jī)啟動(dòng),再讓plc控制水阻電機(jī)使水阻緩慢減小到最小值,系統(tǒng)這樣串入水阻是因?yàn)榭梢詼p小電機(jī)的大啟動(dòng)電流對(duì)系統(tǒng)的沖擊,當(dāng)水阻值達(dá)到最小時(shí)合1km將水阻短路進(jìn)而使完成電機(jī)的啟動(dòng)階段,當(dāng)調(diào)速時(shí)再合4km和3km進(jìn)入調(diào)速狀態(tài)。
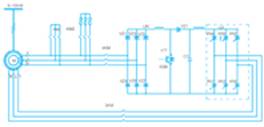
圖3 基于plc的內(nèi)反饋串級(jí)調(diào)速系統(tǒng)原理圖
4 串級(jí)調(diào)速系統(tǒng)在全速狀態(tài)下的故障處理
4.1 全速正常轉(zhuǎn)停車過程中故障處理邏輯控制程序
串級(jí)調(diào)速控制系統(tǒng)的正常停車為就地或遠(yuǎn)方停車按鈕或停車命令,或?yàn)楣收蠒r(shí)系統(tǒng)停車指令。在全速狀態(tài)下,高壓開關(guān)qf保持閉合狀態(tài),接觸器2km處于斷開狀態(tài),而接觸器1km、3km、4km處于閉合狀態(tài),斬波器igbt的導(dǎo)通時(shí)間是整個(gè)周期,水阻的極板在最小位上。當(dāng)按下就地設(shè)備上的停車按鈕或從遠(yuǎn)方觸摸屏發(fā)出停車命令時(shí),控制器plc發(fā)出高壓開關(guān)qf斷開命令, 然后再檢測(cè)qf的輔助觸點(diǎn)是否是真的斷開。如果經(jīng)過一定的時(shí)間,這個(gè)qf斷開信號(hào)沒有返回到plc的輸入端,則plc認(rèn)為高壓開關(guān)發(fā)生故障,發(fā)出報(bào)警信號(hào),提醒工作人員現(xiàn)在設(shè)備發(fā)生故障需要檢查設(shè)備,直至此故障被徹底的解決掉;如果qf的輔助觸點(diǎn)斷開,則這個(gè)斷開信號(hào)將返回到plc的輸入電路。plc會(huì)認(rèn)為有全速轉(zhuǎn)向停車的過程已經(jīng)結(jié)束,發(fā)送命令使得停車狀態(tài)指示燈亮起來。該故障處理流程如圖4所示。
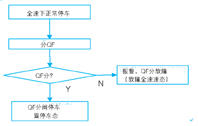
圖4 全速正常轉(zhuǎn)停車過程中故障處理流程
如圖5中信號(hào)1為電容電壓,信號(hào)2為4km返回。在進(jìn)行保護(hù)時(shí),4km分快于2km合。從圖中可以看出,當(dāng)某一時(shí)刻qf跳閘時(shí),電容電壓十分迅速的從70v降至0v。而接觸器4km在qf跳閘后經(jīng)過55ms左右后由閉合狀態(tài)轉(zhuǎn)換到斷開狀態(tài)。
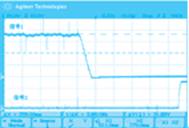
圖5 qf跳閘故障波形圖
4.2 全速態(tài)下緊急停車過程中故障處理邏輯控制程序
串級(jí)調(diào)速控制系統(tǒng)在全速狀態(tài)下在某些特殊的情況下需要緊急停車。如圖6 所示,在這種情況下,plc發(fā)出斷開高壓開關(guān)qf的命令。如果在一定時(shí)間內(nèi)qf狀態(tài)的返回信號(hào)沒有送到plc的輸入端,則plc會(huì)發(fā)出使得接觸器4km斷開的命令;如果這個(gè)qf斷開信號(hào)送到了plc的輸入端,這個(gè)系統(tǒng)在全速狀態(tài)下緊急停車過程結(jié)束,發(fā)送命令使得停車狀態(tài)指示燈亮起來。
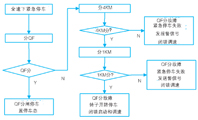
圖6 全速下緊急停車過程故障處理流程
而plc發(fā)出斷開接觸器4km的信號(hào),可以從圖3的基于plc的內(nèi)所饋串級(jí)調(diào)速系統(tǒng)原理圖中得知,這相當(dāng)于是把整流、斬波和逆變這三部分從系統(tǒng)中切除。讓系統(tǒng)在全速、轉(zhuǎn)子繞組開路或者轉(zhuǎn)子繞組串水阻的方式運(yùn)行。如果經(jīng)過一定時(shí)間接觸器4km的斷開信號(hào)沒有返回到plc的輸入端,則plc會(huì)認(rèn)為接觸器4km也發(fā)生故障不能正常操作,在發(fā)報(bào)警信號(hào)的同時(shí),閉鎖系統(tǒng)進(jìn)入調(diào)速狀態(tài)的權(quán)限。
當(dāng)接觸器4km的斷開信號(hào)送到plc的輸入端后,plc發(fā)斷開接觸器1km的命令,既然高壓開關(guān)都不能斷開,但要想使電機(jī)停下來,也只有讓電機(jī)處在轉(zhuǎn)子繞組開路的狀態(tài)。當(dāng)接觸器1km在一段時(shí)間內(nèi)沒有把斷開信號(hào)返回到plc的輸入端,系統(tǒng)也只能保持全速的工作狀態(tài),發(fā)出報(bào)警信號(hào)的同時(shí),閉鎖系統(tǒng)進(jìn)入調(diào)速狀態(tài)的權(quán)限。如果這個(gè)斷開信號(hào)送到了plc的輸入端,則電機(jī)按最壞的處境,保持在轉(zhuǎn)子開路的狀態(tài)下,當(dāng)然這種情況下,電機(jī)是無奈的停止轉(zhuǎn)動(dòng)。plc在發(fā)出報(bào)警信號(hào)的同時(shí),閉鎖系統(tǒng)進(jìn)入啟動(dòng)和調(diào)速狀態(tài)的權(quán)限。
如圖7所示 為逆變停止后停車的電壓波形圖。圖中信號(hào)1為電容電壓,信號(hào)2為4km返回。正常全速或故障轉(zhuǎn)全速時(shí),電容儲(chǔ)能不為零,額定電壓約70v,全速時(shí)電容電壓約40v。
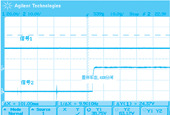
圖7 全速停車過程波形圖
5 結(jié)束語
本文充分考慮了內(nèi)反饋串級(jí)調(diào)速系統(tǒng)的原理,采用西門子公司的plc組成串調(diào)的控制系統(tǒng),充分利用了plc控制系統(tǒng)的全數(shù)字化,簡(jiǎn)單可靠,體積小,控制更加準(zhǔn)確,搞干擾能力強(qiáng)等優(yōu)點(diǎn),并且通過流程圖全面分析了電機(jī)在全速狀態(tài)下可能出現(xiàn)的幾種故障,通過仿真波形可以看出在plc控制系統(tǒng)中,當(dāng)全速狀態(tài)下某種異常情況發(fā)生時(shí),控制系統(tǒng)都能夠及時(shí)準(zhǔn)確的采取相關(guān)的保護(hù)措施,由于全速狀態(tài)是電機(jī)工作的一個(gè)重要狀態(tài),如果全速狀態(tài)下的故障發(fā)生率能夠得到有效的控制,那么對(duì)于維護(hù)整個(gè)調(diào)速系統(tǒng)的穩(wěn)定性將是至關(guān)重要的。
作者簡(jiǎn)介
姜棟棟(1986-) 男 碩士研究生,研究方向?yàn)殡娏﹄娮蛹夹g(shù)和電氣拖動(dòng)及自動(dòng)化。
參考文獻(xiàn)(略)
