
摘要:提出一種高性能低成本的電動(dòng)代步車控制器設(shè)計(jì)方案。該控制器以Atmel公司的AVR單片機(jī)為控制核心,,H橋電路作為直流電機(jī)驅(qū)動(dòng)器,,使用者通過搖桿操控電動(dòng)代步車的速度和轉(zhuǎn)向??刂破鞯能浖糠钟上到y(tǒng)自檢,、搖桿位置檢測和電機(jī)運(yùn)動(dòng)3大部分組成,并靈活使用系統(tǒng)時(shí)標(biāo),,事件觸發(fā)機(jī)制和有限狀態(tài)機(jī)等編程新方法,,以確保系統(tǒng)的安全性和穩(wěn)定性。實(shí)踐表明,,該電動(dòng)代步車控制器能夠?qū)崿F(xiàn)多種故障診斷功能,,電機(jī)啟動(dòng)和停止時(shí)運(yùn)行平穩(wěn),搖桿操作靈活,,系統(tǒng)整體性能良好,,能夠滿足實(shí)際使用要求,。
關(guān)鍵詞:代步車;微處理器,;直流電機(jī),;搖桿
本世紀(jì)將是一個(gè)人口老齡化程度越來越高的世紀(jì),老年人和殘疾人的護(hù)理將是社會(huì)的一個(gè)沉重負(fù)擔(dān),。據(jù)老齡委統(tǒng)計(jì)結(jié)果顯示,,2004年底,中國60歲及以上老年人口為1.43億,,2014年將達(dá)到2億,,2026年將達(dá)到3億,老齡人口的規(guī)模將越來越大,。同時(shí)在我國人口中有8 296萬殘疾人,,占全國總?cè)丝诘谋壤秊?.34%,其中肢體殘疾人數(shù)2 412萬,,占29.07%,。老年人和殘疾人這個(gè)龐大的弱勢群體需要一種適合他們心理和生理的代步車來滿足日常生活及參與社會(huì)活動(dòng)的需要。
隨著科學(xué)技術(shù)的迅速發(fā)展和人民的生活水平的不斷提高,,手動(dòng)輪椅逐漸被性能優(yōu)越,、操作簡單、行駛安全的電動(dòng)代步車所替代,。電動(dòng)代步車的出現(xiàn)除了能滿足老年人或殘疾人室內(nèi)外活動(dòng)的要求之外,,還在醫(yī)療康復(fù)中發(fā)揮著越來越大的作用,。例如,,腿部骨折的患者可以在康復(fù)過程中使用電動(dòng)代步車,那么即使腿腳不便也可以在一定的范圍內(nèi)自由活動(dòng),。電動(dòng)代步車作為醫(yī)療康復(fù)工具時(shí)也將增加若干功能,,例如使用者可以通過調(diào)整座椅和靠背的角度,在電動(dòng)代步車的幫助下實(shí)現(xiàn)平躺或站立等不同姿勢,。
電動(dòng)代步車使用蓄電池作為能源,,以直流電動(dòng)機(jī)作為執(zhí)行機(jī)構(gòu),安全可靠,。老年人,、殘疾人或者康復(fù)者只需要控制搖桿就可以控制電動(dòng)代步車的運(yùn)動(dòng)速度和方向,學(xué)習(xí)簡單,,操作方便,,無需他人看護(hù),這些特點(diǎn)可以很好的擴(kuò)大使用者的運(yùn)動(dòng)空間,,豐富他們的生活,。
由于電動(dòng)代步車的使用對象為老年人或殘疾人,,所以安全性尤為重要??刂破鞅仨毦哂幸欢ǖ墓收显\斷功能,,能夠自動(dòng)排除故障或?qū)⒐收纤鶐淼暮蠊麥p小到最低程度。為了造福萬家,,開發(fā)一款性能穩(wěn)定,、功能完善、價(jià)格低廉的電動(dòng)代步車通用控制器尤為重要,。
1 系統(tǒng)構(gòu)成
電動(dòng)代步車大致可以分為4類:室內(nèi)型,,庭院型,功能型和道路型,。室內(nèi)型電動(dòng)代步車操作輕巧靈活,,適于室內(nèi)使用;庭院型電動(dòng)代步車主要用作戶外短距離代步使用,;功能型電動(dòng)代步工具主要滿足醫(yī)療康復(fù)使用,,功能較多;道路型電動(dòng)代步車動(dòng)力較強(qiáng),,適于在城市道路上較長距離行駛,。本文主要介紹庭院型電動(dòng)代步車。
電動(dòng)代步車的機(jī)械結(jié)構(gòu)延續(xù)了傳統(tǒng)輪椅車的機(jī)械結(jié)構(gòu),,體現(xiàn)出人性化,,具有舒適性和便攜性,同時(shí)為了配合電動(dòng)代步車的特性,,在傳統(tǒng)的機(jī)械結(jié)構(gòu)上加裝了一些減震部件,,使得運(yùn)行更舒適平穩(wěn)。
如圖1所示,,電動(dòng)代步車主要由座椅,、車架、驅(qū)動(dòng)后輪,、導(dǎo)向前輪,、蓄電池、電子控制器構(gòu)成,。座椅固定在車架上,,驅(qū)動(dòng)后輪一般設(shè)置在座椅后部,轉(zhuǎn)向前輪一般設(shè)置在椅座前部,,蓄電池設(shè)置在椅座下方兩個(gè)驅(qū)動(dòng)后輪之間,,電子控制器設(shè)置在椅座的扶手上。

圖2為電動(dòng)代步車控制器結(jié)構(gòu)示意圖,,主要包括微控制器,、電機(jī)驅(qū)動(dòng)電路,、搖桿檢測電路以及人機(jī)對話接口等。為了有效保護(hù)和監(jiān)控電機(jī)的運(yùn)轉(zhuǎn),,提高電動(dòng)代步車的安全性能,,還加入了電源電壓檢測接口、電機(jī)電流檢測,、充電器檢測接口等功能,。

2 硬件設(shè)計(jì)
2.1 微控制器
微控制器并不是功能越豐富越好,應(yīng)遵循以下2條基本原則:一是微控制器的片內(nèi)資源恰好能滿足設(shè)計(jì)要求,,靈活地使用片內(nèi)資源可以減少外圍擴(kuò)展芯片的數(shù)量,,也以減小電路板的面積;二是在滿足功能的前提下,,價(jià)格要盡可能的低,。
本控制器采用Atmel公司的Atmgeal6(L)。該型號(hào)的單片機(jī)片內(nèi)資源較為豐富,,集成了EEPROM,、A/D轉(zhuǎn)換器、PWM等功能模塊,。EEPROM功能可以用于相關(guān)控制參數(shù)的掉電保存:PWM功能通過H橋?qū)崿F(xiàn)對直流電機(jī)的調(diào)速控制,;A/D轉(zhuǎn)換功能可以實(shí)現(xiàn)直流電機(jī)的電流檢測,同時(shí)也可以實(shí)現(xiàn)搖桿位置信息的采集,。作為RISC精簡指令的高速8位單片機(jī),,和51內(nèi)核的單片機(jī)相比,在相同價(jià)格基礎(chǔ)上具有運(yùn)算速度上的優(yōu)勢,。
2.2 電機(jī)驅(qū)動(dòng)電路
電動(dòng)代步車的2個(gè)驅(qū)動(dòng)后輪分別由2個(gè)直流電機(jī)帶動(dòng),。直流電機(jī)由2個(gè)半橋驅(qū)動(dòng)器IR2104控制的H橋功率電路進(jìn)行驅(qū)動(dòng),即由4個(gè)功率MOSF-ET電路IRF1010N(VDSS=55 V,,RDS(on)=11 MΩ,,ID=85 A)組成電機(jī)的雙向速度控制電路,,如圖3所示,。當(dāng)PWM2為低電平時(shí),VQ3截止,,VQ4導(dǎo)通,,PWM1輸入調(diào)速信號(hào),電機(jī)正轉(zhuǎn),;當(dāng)PWM1為低電平時(shí),,VQ1截止,VQ2導(dǎo)通,,PWM1輸入調(diào)速信號(hào),,電機(jī)反轉(zhuǎn),。

由于電機(jī)的額定功率較大,在設(shè)計(jì)電機(jī)相關(guān)驅(qū)動(dòng)電路時(shí),,應(yīng)注意過載保護(hù)和功率元件的散熱問題,。電動(dòng)代步車通過左右電機(jī)差速運(yùn)動(dòng)實(shí)現(xiàn)各方向的運(yùn)動(dòng),為了達(dá)到控制的協(xié)調(diào)性,,電機(jī)的運(yùn)動(dòng)算法也需要通過試驗(yàn)不斷修改,。除此之外應(yīng)考慮電機(jī)啟動(dòng)或停止時(shí)的加減速過程,保證運(yùn)動(dòng)的平穩(wěn)性,。
2.3 搖桿檢測電路
搖桿是電動(dòng)代步車最為重要的輸入設(shè)備,,搖桿既可以控制電機(jī)電源的打開和關(guān)閉,也可以控制左右兩個(gè)電機(jī)的速度和運(yùn)行方向,。
控制器需要通過檢測搖桿的位置來確定電機(jī)的運(yùn)行速度,,搖桿實(shí)質(zhì)上是一個(gè)位置傳感器,一個(gè)包含XY兩個(gè)垂直方向的位置傳感器,。搖桿主要由4個(gè)位置固定的線性霍爾和4個(gè)可以移動(dòng)的磁鋼組成,,若搖桿被推動(dòng),磁鋼和線性霍爾的相對位置就會(huì)改變,,線性霍爾的輸出電壓也跟著變化,,控制器通過A/D轉(zhuǎn)換器測量這4個(gè)電壓值,以確定搖桿的位置,。
線性霍爾的靈敏度越高,,其輸出電壓值范圍越寬,搖桿位置的分辨率也就越高,,電動(dòng)代步車的操縱性能也就越好,,所以線性霍爾的選擇非常重要。本控制器采用Honeywell的SS490系列線性霍爾,,其靈敏度可達(dá)3.125 mV/G,,可以滿足要求。
2.4 人機(jī)對話接口
面板是重要的人機(jī)對話接口,,包括功能按鍵接口,,速度檔位顯示接口,蓄電池電量顯示接口,。前面板的設(shè)計(jì)原則是簡潔美觀,、成本低,速度檔位顯示和電池電量顯示均采用LED組成的光柱來顯示這些值的變化情況,。
面板功能鍵共有5個(gè),,分別是速度檔位增加鍵,速度檔位降低鍵,,電源打開鍵,,電源關(guān)閉鍵和蜂鳴器鍵,;共有12個(gè)LED,其中速度檔位顯示5個(gè),,用于反映當(dāng)前速度檔位,,蓄電池電量顯示7個(gè),用于實(shí)時(shí)顯示蓄電池電量,,提醒用戶在電量過低時(shí)及時(shí)充電,。
3 軟件設(shè)計(jì)
3.1 程序結(jié)構(gòu)
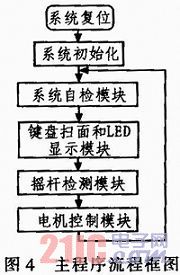
根據(jù)電動(dòng)代步車的功能需求,將控制器軟件劃分為4個(gè)主要模塊:系統(tǒng)自檢模塊,、鍵盤和LED顯示模塊,、搖桿檢測模塊以及電機(jī)控制模塊。圖4為控制器的主程序流程框圖,。
3.2 系統(tǒng)自檢模塊
系統(tǒng)自檢模塊是電動(dòng)代步車安全性能的關(guān)鍵,,主要完成對自身運(yùn)行狀態(tài)和故障診斷,故障信息應(yīng)及時(shí)處理并通過人機(jī)接口提醒用戶,。由于電動(dòng)代步車的使用對象為老年人和殘疾人,,所以控制器的安全性尤為重要。系統(tǒng)自檢模塊主要完成如下任務(wù):1)檢查充電器接口,;2)檢查蓄電池電壓,;3)檢查制動(dòng)器接口;4)檢查搖桿接口,;5)顯示故障狀態(tài),。
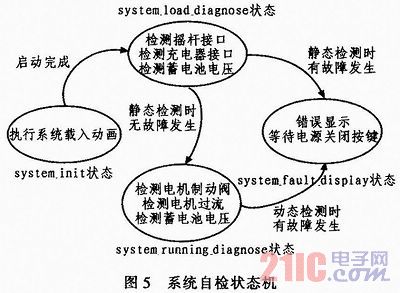
為保障系統(tǒng)的穩(wěn)定性和可靠性,自檢模塊采用事件觸發(fā)機(jī)制,。圖5為系統(tǒng)自檢狀態(tài)機(jī),,這些功能函數(shù)每秒執(zhí)行約100次。在系統(tǒng)自檢函數(shù)中有若干自檢標(biāo)志,,這些標(biāo)志位初始值均是FALSE,,如果在系統(tǒng)自檢函數(shù)中被置成TRUE或者在其他模塊中被置成TRUE,則說明故障發(fā)生,,需要及時(shí)處理和對策,。
3.3 搖桿檢測模塊
搖桿檢測模塊的主要功能是獲取搖桿的位置參數(shù),以計(jì)算左右驅(qū)動(dòng)后輪的運(yùn)轉(zhuǎn)方向和PWM脈寬,,搖桿位置參數(shù)是電動(dòng)代步車的關(guān)鍵參數(shù)之一,。搖桿檢測模塊的主要功能有:1)檢測搖桿X方向的位置,;2)檢測搖桿Y方向的位置:3)處理搖桿X方向的位置,;4)處理搖桿Y方向的位置;5)獲得左電機(jī)的脈寬和方向,;6)獲得右電機(jī)的脈寬和方向,。
如果把搖桿的信號(hào)看作是二維輸出信號(hào),,分別在二維坐標(biāo)系中用X軸和Y軸表示??梢詫軸信號(hào)看作是代步車的轉(zhuǎn)向速度給定信號(hào),,而Y軸信號(hào)則可以看作是代步車的前向或后向速度給定信號(hào)。如果用戶想要轉(zhuǎn)向或前進(jìn),,則可將代步車的運(yùn)動(dòng)方向看作是X和Y的矢量合成,。當(dāng)代步車前進(jìn)或后退時(shí),左右輪同時(shí)向前或向后轉(zhuǎn)動(dòng),。當(dāng)代步車向左轉(zhuǎn)時(shí),,右輪正向轉(zhuǎn)動(dòng),左輪反向轉(zhuǎn)動(dòng)或保持不動(dòng),;相反,,當(dāng)代步車向右轉(zhuǎn)時(shí),左輪正向轉(zhuǎn)動(dòng),,右輪反向轉(zhuǎn)動(dòng)或保持不動(dòng),。當(dāng)兩輪中一輪向前轉(zhuǎn)動(dòng)而另一輪向后轉(zhuǎn)動(dòng),電動(dòng)代步車做原地360°回轉(zhuǎn),。
搖桿模塊工作時(shí),,通過A/D轉(zhuǎn)換器不斷獲取搖桿XY兩個(gè)方向的坐標(biāo)值,然后對這些坐標(biāo)值進(jìn)行處理,,計(jì)算控制左右電機(jī)的PWM脈寬值,。搖桿位置和左右電機(jī)脈寬的關(guān)系如圖6所示,在實(shí)際的檢測中,,由于搖桿幾何尺寸的限制,,XY坐標(biāo)值不可能同時(shí)為最大值。出于安全因素的考慮,,為防止出現(xiàn)死區(qū),,當(dāng)XY坐標(biāo)值都大于某一值時(shí),左右電機(jī)的脈寬都輸出最大值,。

3.4 電機(jī)控制模塊
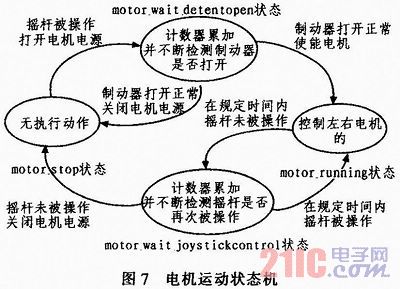
電機(jī)控制模塊是電動(dòng)代步車的核心模塊,,由于電機(jī)的運(yùn)動(dòng)狀態(tài)較多,所以該部分也采用了有限狀態(tài)機(jī)的編程方法,,實(shí)踐表明通過合理地抽象電機(jī)運(yùn)動(dòng)狀態(tài),,可以使編程達(dá)到事半功倍的效果。電機(jī)控制的狀態(tài)流程圖如圖7所示,。
電機(jī)控制模塊有以下主要功能:1)左電機(jī)的速度和方向控制功能:2)右電機(jī)的速度和方向控制功能,;3)左電機(jī)加減速功能;4)右電機(jī)加減速功能;5)左電機(jī)電流檢測功能,;6)右電機(jī)電流檢測功能,。
合理的加減速控制可以大大增強(qiáng)電動(dòng)代步車的舒適性。從搖桿檢測模塊獲得的電機(jī)脈寬參數(shù)并不會(huì)直接作用在電機(jī)上,,而是有一個(gè)中間的變量,,這個(gè)中間變量會(huì)和當(dāng)前的脈寬進(jìn)行比較,當(dāng)和當(dāng)前脈寬相差不大時(shí),,當(dāng)前的脈寬值和期望值相同,;若這兩個(gè)值相差較大時(shí),這個(gè)中間變量會(huì)變大或者變小以減小和期待脈寬的差距,。由于這些函數(shù)都是以每秒100次的速度快速運(yùn)行,,所以用戶感覺電機(jī)的啟動(dòng)和停止都非常平穩(wěn)。
4 結(jié)論
未來的電動(dòng)代步車控制器將會(huì)朝著多功能化和個(gè)性化方向發(fā)展,,操作舒適性和使用安全性依然是控制器設(shè)計(jì)的主旋律,。工程師在安全性和舒適性方面不斷地精益求精,同時(shí)也更重視控制參數(shù)的可調(diào)整性,,例如可以調(diào)整搖桿的靈活性,,以適應(yīng)不同的室內(nèi)室外環(huán)境。提高電動(dòng)代步車的安全性能,,降低生產(chǎn)成本,,提高用戶的自主操控能力,對取代傳統(tǒng)輪椅車具有重要意義,。本文介紹的電動(dòng)代步車控制器,,能夠保證產(chǎn)品的使用性能,也降低了成本,,已在實(shí)際產(chǎn)品中得到成功應(yīng)用,。該控制器功能還將在系統(tǒng)安全性,搖桿操控性能以及智能化程度等方面進(jìn)一步改進(jìn)和完善,,為老年人和殘疾人提供更好的產(chǎn)品,。