
摘要:電動(dòng)助力轉(zhuǎn)向" title="電動(dòng)助力轉(zhuǎn)向">電動(dòng)助力轉(zhuǎn)向(EPS)是一種新型的汽車" title="汽車">汽車動(dòng)力轉(zhuǎn)向技術(shù),。設(shè)計(jì)了一種基于TMS320LF2407A" title="TMS320LF2407A">TMS320LF2407A DSP控制的汽車電動(dòng)助力轉(zhuǎn)向系統(tǒng),,介紹了其硬件組成及軟件結(jié)構(gòu),采用PID控制策略對(duì)電機(jī)電流進(jìn)行閉環(huán)控制,,利用PWM技術(shù)控制電機(jī)的電壓,,以調(diào)節(jié)助力電流達(dá)到助力轉(zhuǎn)向的目的。并做了Matlah仿真實(shí)驗(yàn),,仿真結(jié)果表明,,該系統(tǒng)具有良好的助力特性。
關(guān)鍵詞:汽車,;電動(dòng)助力轉(zhuǎn)向,;TMS320LF2407A;脈寬調(diào)制" title="脈寬調(diào)制">脈寬調(diào)制
0 引言
電動(dòng)助力轉(zhuǎn)向(Electric Power Steering,,EPS)系統(tǒng)是一種依靠電動(dòng)機(jī)直接提供輔助轉(zhuǎn)矩的動(dòng)力轉(zhuǎn)向系統(tǒng),,將最新電力電子技術(shù)與電機(jī)控制技術(shù)應(yīng)用于汽車轉(zhuǎn)向系統(tǒng),大大提高了汽車的經(jīng)濟(jì)性,、動(dòng)力性和機(jī)動(dòng)性,,適應(yīng)了現(xiàn)代汽車技術(shù)的要求,并且節(jié)約燃料,,有利于環(huán)保,,已成為目前世界汽車技術(shù)發(fā)展的研究熱點(diǎn)和前沿技術(shù)之一。與傳統(tǒng)的液壓轉(zhuǎn)向系統(tǒng)相比,,EPS系統(tǒng)可較容易地實(shí)現(xiàn)在車速不同時(shí)電動(dòng)機(jī)提供的助力也不同,,保證汽車在低速行駛時(shí)轉(zhuǎn)向輕便靈活,高速行駛時(shí)轉(zhuǎn)向穩(wěn)定可靠,。本文基于電動(dòng)助力轉(zhuǎn)向原理,,采用了PID控制策略,設(shè)計(jì)了一種基于TMS320LF2407A DSP控制的EPS系統(tǒng),,仿真結(jié)果表明采用PID控制方法可以達(dá)到較好的轉(zhuǎn)向性能,。
1 EPS系統(tǒng)結(jié)構(gòu)和工作原理
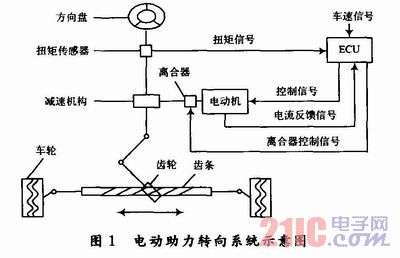
圖1所示為典型的齒輪一齒條式電動(dòng)助力轉(zhuǎn)向系統(tǒng)示意圖,其基本組成包括扭矩傳感器,、車速傳感器,、電子控制單元(ECU)、電動(dòng)機(jī)、減速機(jī)構(gòu)及齒輪齒條轉(zhuǎn)向器等,。當(dāng)汽車轉(zhuǎn)向時(shí),,扭矩傳感器測(cè)出方向盤的輸出扭矩,送給電子控制單元(ECU),,電子控制單元再綜合車速傳感器送來(lái)的車速信號(hào),,并根據(jù)相應(yīng)的控制策略確定一個(gè)目標(biāo)電流,控制電動(dòng)機(jī)轉(zhuǎn)動(dòng),。電動(dòng)機(jī)的輸出轉(zhuǎn)矩通過(guò)離合器,、減速機(jī)構(gòu)的作用使車輪偏移一定的角度,從而起到對(duì)轉(zhuǎn)向系統(tǒng)的助力作用,。電子控制單元對(duì)傳感器檢測(cè)到的上述信號(hào)進(jìn)行運(yùn)算分析后,,向驅(qū)動(dòng)單元送出合理的控制信號(hào),控制電機(jī)的電流大小和方向,,同時(shí)將電壓的電流信號(hào)作為反饋信號(hào)送到電子控制單元,,形成閉環(huán)控制方式。
2 電動(dòng)助力轉(zhuǎn)向系統(tǒng)硬件設(shè)計(jì)
2.1 控制原理
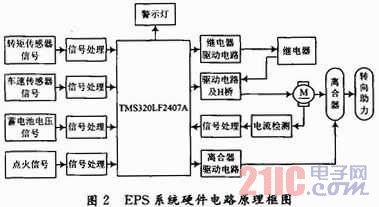
EPS系統(tǒng)硬件控制原理如圖2所示,,該系統(tǒng)是利用電流反饋技術(shù)建立起來(lái)的,,其控制核心為TMS320LF2407A DSP。當(dāng)汽車點(diǎn)火時(shí),,接通蓄電池電源,,DSP上電后對(duì)EPS系統(tǒng)進(jìn)行自檢,自檢通過(guò)后,,閉合繼電器和離合器,,EPS系統(tǒng)開始工作。當(dāng)駕駛員轉(zhuǎn)動(dòng)方向盤,,即把扭矩傳感器檢測(cè)到方向盤的扭矩和轉(zhuǎn)動(dòng)方向信號(hào),,車速傳感器檢測(cè)到車速信號(hào),經(jīng)過(guò)處理之后送到TMS32LF2407A相應(yīng)端口,,DSP根據(jù)方向盤扭矩,,通過(guò)PWM口發(fā)出電流指令和相應(yīng)的轉(zhuǎn)向控制端口發(fā)出轉(zhuǎn)向命令,通過(guò)驅(qū)動(dòng)電路及由4個(gè)MOSFET組成的H橋電路驅(qū)動(dòng)電機(jī)轉(zhuǎn)向,。在此過(guò)程中,,DSP檢測(cè)到有故障發(fā)生時(shí),將驅(qū)動(dòng)警示燈發(fā)亮進(jìn)行報(bào)警提示,,同時(shí)斷開繼電器,恢復(fù)到機(jī)械轉(zhuǎn)向狀態(tài),。
2.2 TMS320LF2407A芯片介紹
該系統(tǒng)的微處理器采用TI公司生產(chǎn)的TMS320LF2407A芯片,。它是目前國(guó)際市場(chǎng)上較先進(jìn)、功能較強(qiáng)大的16 b定點(diǎn)DSP芯片之一。TMS320LF 2407A是集成CAN通信接口的低成本數(shù)字處理器,,面向電機(jī)的數(shù)字控制,,運(yùn)用于汽車電子領(lǐng)域。它采用高性能靜態(tài)CMOS技術(shù),,具有低功耗和高速度的特點(diǎn),,工作電壓為3.3 V,減少了控制器的功耗,,40 MIPS的執(zhí)行速度,,提高了控制器的實(shí)時(shí)控制能力,片內(nèi)32 KB的FLASH程序存儲(chǔ)器,,205 KB的數(shù)據(jù)/程序RAM,,544 B雙口RAM和2 KB的單口RAM,16通道10位A/D轉(zhuǎn)換器,,2組事件管理器:EVA,、EVB,每個(gè)包括2個(gè)16 b通用定時(shí)器和8個(gè)16 b的PWM輸出通道,,改進(jìn)的哈佛總線結(jié)構(gòu),,支持動(dòng)態(tài)改變鎖相環(huán)的倍頻系數(shù),看門狗定時(shí)模塊等,,系統(tǒng)可靠穩(wěn)定,。同時(shí)該芯片對(duì)C語(yǔ)言的高編譯效率,使得軟件的開發(fā)周期大大縮短,。
2.3 TMS320LF2407A電源電路
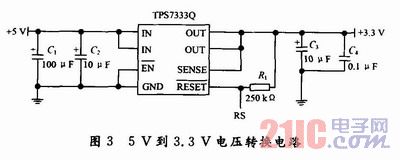
本系統(tǒng)選用5 V蓄電池電源,,由于TMS320LF2407A芯片的工作電壓為3.3 V,所以必須使用電源轉(zhuǎn)換芯片,。本系統(tǒng)采用TI公司的TPS7333Q電源轉(zhuǎn)換芯片完成5 V到3.3 V的轉(zhuǎn)換,。該芯片使用PMOS晶體管傳送電流,其柵極由電壓驅(qū)動(dòng),,工作電流低且在全負(fù)載內(nèi)不變,,具有內(nèi)部電流限制和過(guò)熱保護(hù)的特點(diǎn),同時(shí)該芯片提供上電復(fù)位信號(hào),。
3 控制策略
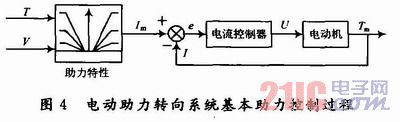
利用電動(dòng)機(jī)轉(zhuǎn)矩和電流成正比的特性,,采用控制電動(dòng)機(jī)電樞電流的方法,實(shí)現(xiàn)助力控制,。助力控制是在轉(zhuǎn)向過(guò)程中為減輕方向盤的操縱力,,通過(guò)渦輪蝸桿減速機(jī)構(gòu)把電動(dòng)機(jī)轉(zhuǎn)矩作用在轉(zhuǎn)向軸上的一種基本控制模式。將方向盤轉(zhuǎn)矩傳感器檢測(cè)到的轉(zhuǎn)矩信號(hào)和車速傳感器檢測(cè)到的車速信號(hào)輸入到DSP控制器中,,根據(jù)“扭矩-電動(dòng)機(jī)助力目標(biāo)電流”,,確定電動(dòng)機(jī)助力的目標(biāo)電流,輸入到電動(dòng)機(jī),然后將霍爾電流傳感器檢測(cè)到的實(shí)際電流和目標(biāo)電流進(jìn)行比較,,利用PID調(diào)節(jié)器進(jìn)行調(diào)節(jié),,然后輸出PWM信號(hào)到驅(qū)動(dòng)電路,進(jìn)行電動(dòng)機(jī)助力,,電動(dòng)助力轉(zhuǎn)向系統(tǒng)(EPS)的基本控制過(guò)程如圖4所示,。
3.1 電機(jī)助力控制算法
控制系統(tǒng)根據(jù)駕駛員加在方向盤上的力矩和當(dāng)時(shí)的車速,按照預(yù)制助力特性確定電機(jī)目標(biāo)助力電流的大小和方向,。助力變化區(qū)域中,,方向盤輸入力矩與助力矩按線性規(guī)律變化。其函數(shù)表達(dá)為:
式中:I為電動(dòng)機(jī)目標(biāo)電流,;Imax為電動(dòng)機(jī)最大工作電流,;Td為方向盤輸入轉(zhuǎn)矩;k(v)為助力特性曲線的梯度,,隨車速增加而減?。籘d0為系統(tǒng)開始助力時(shí)的方向盤輸入力矩,;Tdmax為系統(tǒng)提供最大助力時(shí)的方向盤輸入力矩,。
本系統(tǒng)采用直線型助力特性曲線,橫坐標(biāo)為方向盤輸入扭矩(單位:N·m),,縱坐標(biāo)為助力電流Im,,其中,Td0=±1 N·m,,Tdmax=±7 N·m,,Vmax=80 km/h,方向盤轉(zhuǎn)矩工作在-10~+10 N·m之間,,進(jìn)入-7~+7 N·m后電動(dòng)機(jī)電流達(dá)到飽和,,電動(dòng)機(jī)的最大工作電流小于20 A。隨著車速的增加,,電機(jī)電流減小,,助力斜率減小,手感由輕轉(zhuǎn)重,,方向盤順時(shí)針轉(zhuǎn)向和逆時(shí)針轉(zhuǎn)向時(shí)曲線對(duì)稱,。
3. 2 電機(jī)電流控制算法
本系統(tǒng)使用的是數(shù)字PID控制器,其算法有位置式控制算法和增量式控制算法兩種,。位置式PID控制算法為全量輸出,,其產(chǎn)生的控制電動(dòng)機(jī)的電流易產(chǎn)生方向盤振動(dòng),因此采用增量式PID控制算法來(lái)進(jìn)行電動(dòng)機(jī)電流的控制,。
增量式PID控制算法表達(dá)式為:

式中:Un為控制量,,也是電機(jī)驅(qū)動(dòng)電路的輸入量,;en為電機(jī)目標(biāo)電流和實(shí)際電流之間的差值,;kP為比例系數(shù),,kI為積分系數(shù),kD為微分系數(shù),。
3.3 仿真結(jié)果分析
由于EPS的助力轉(zhuǎn)矩跟電動(dòng)機(jī)的電流成正比,,因此分析系統(tǒng)助力轉(zhuǎn)矩的變化就能得出系統(tǒng)助力電流的變化規(guī)律,從而研究EPS中電動(dòng)機(jī)助力電流控制的算法,。
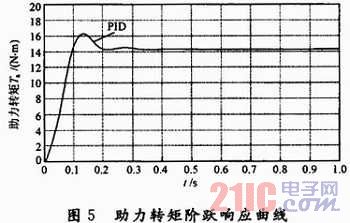
圖5是系統(tǒng)在Matlab中PID控制下電動(dòng)機(jī)輸出的助力轉(zhuǎn)矩對(duì)方向盤輸入轉(zhuǎn)矩的階躍響應(yīng)曲線,,從中可以很明顯地看出,采用PID控制系統(tǒng)達(dá)到穩(wěn)態(tài)值需要的時(shí)間短,、超調(diào)量小,,振蕩次數(shù)少,說(shuō)明PID控制系統(tǒng)的穩(wěn)定性和響應(yīng)品質(zhì)都比較好,。因此,,采用PID控制算法能較好地按照控制策略的要求提供轉(zhuǎn)向助力。
4 EPS系統(tǒng)軟件設(shè)計(jì)
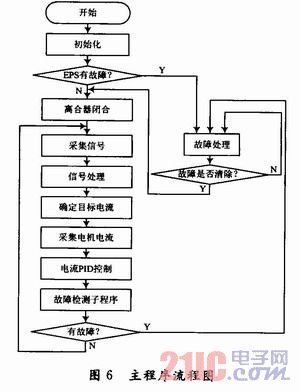
根據(jù)上述控制方法,,設(shè)計(jì)了相應(yīng)控制軟件,。DSP上電后要進(jìn)行特殊功能寄存器的初始化,包括定時(shí)器工作方式,、A/D采樣方式設(shè)置等,。初始化設(shè)置結(jié)束后,開始檢查EPS系統(tǒng)中的電機(jī),、離合器,、扭矩傳感器等工作是否正常,如有故障則點(diǎn)亮警示燈進(jìn)行報(bào)警,,若一切正常則EPS系統(tǒng)開始正常的電動(dòng)助力控制,,主程序流程如圖6所示。整個(gè)程序還包括一些子程序,、如系統(tǒng)初始化子程序,、定時(shí)器中斷子程序、故障信號(hào)檢測(cè)子程序,、信號(hào)采集濾波子程序等,。
5 結(jié)論
TMS320LF2407A是一種新型16 bDSP,利用它作為控制核心,,簡(jiǎn)化了電動(dòng)助力轉(zhuǎn)向系統(tǒng)的硬件電路的設(shè)計(jì),,有利于控制系統(tǒng)小型化。同時(shí)采用PID控制對(duì)電動(dòng)機(jī)輸出電流進(jìn)行閉環(huán)控制,,系統(tǒng)助力跟隨性能好,,響應(yīng)速度快,,控制精度高。