
0 引言
近年來隨著新材料技術(shù)的發(fā)展,特別是稀土永磁材料,磁性復合材料的出現(xiàn),加之我國擁有世界上最大的高能量密度永磁材料(釹—鐵—硼)的儲量,使得永磁電機活躍在各個工業(yè)生產(chǎn)中。永磁同步電機(PMSM)是近幾年發(fā)展起來的一種新型的電機,具有轉(zhuǎn)子轉(zhuǎn)動慣量小、效率高、功率密度大、可靠性高的優(yōu)點,因此十分適合應用于高性能伺服系統(tǒng)中,例如在數(shù)控機床等場合,永磁同步電動機正在逐步取代直流電機和感應電機。同時由于永磁同步電機無需激磁繞組,明顯地減小了體積,減輕了重量,降低了損耗,避免了電機發(fā)熱,從而提高了效率和功率因數(shù),具有明顯的節(jié)能效果。
尤其在現(xiàn)代的PMSM 運動控制系統(tǒng)中,它比異步電動機更便于實現(xiàn)磁場定向控制,可以獲得與直流電動機一樣優(yōu)良的轉(zhuǎn)矩控制特性,使控制系統(tǒng)具有十分優(yōu)良的動、靜態(tài)特性。
1 永磁同步電機的種類和基本結(jié)構(gòu)
就轉(zhuǎn)子結(jié)構(gòu)看,永磁同步電機分凸裝式、嵌入式和內(nèi)埋式三種基本形式,如圖1 所示,前兩種又統(tǒng)稱為外裝式結(jié)構(gòu)。凸裝式直軸磁阻與交軸磁阻相等,因此交、直軸電感相等,即Ld=Lq,表現(xiàn)為隱極性質(zhì);另外兩種結(jié)構(gòu),直軸磁阻大于交軸磁阻,因此Ld
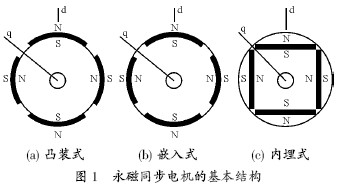
凸裝式結(jié)構(gòu)簡單便宜,應用較多。這種結(jié)構(gòu)中電機轉(zhuǎn)子直徑變得較小,從而導致電機的小慣量,故適用于伺服系統(tǒng)。然而在PMSM中小電感不總是有利,因為小電感將導致弱磁控制。在弱磁控制期間雖然電壓已經(jīng)達到逆變器所能提供的最大值,但速度依然需要不斷上升。弱磁控制是通過增加反相直軸定子電流分量實現(xiàn)的,若電感很小,就只能通過很大的去磁電流和低負載實現(xiàn)弱磁。
嵌入式結(jié)構(gòu)可增大漏磁鏈,因增大的交軸電感使電樞的反應增大,致使極角增大和轉(zhuǎn)矩降低。
內(nèi)埋式電機雖然結(jié)構(gòu)復雜、昂貴,但它具有高氣隙磁通密度,因此它產(chǎn)生的轉(zhuǎn)矩比凸裝式電機產(chǎn)生的轉(zhuǎn)矩大,且氣隙磁通易于正弦分布,從而降低齒槽轉(zhuǎn)矩效應。
2 永磁同步電動機的特點
與傳統(tǒng)異步電機相比,永磁同步電機具有以下特點。
1)高效率、高功率因數(shù)、節(jié)能用永磁體代替電勵磁,不需要無功勵磁電流,可以顯著提高功率因數(shù)。定、轉(zhuǎn)子同步,轉(zhuǎn)子鐵心沒有鐵耗,PMSM 的效率較電勵磁同步電機和異步電機要高。而且,PMSM 在25%耀120%額定負載范圍內(nèi)均可以保持較高的功率因數(shù)和效率,使電機在輕載運行時的節(jié)能效果更為顯著,這樣,在長期的使用中可以大幅度地節(jié)省電能。
2)動態(tài)響應快速、轉(zhuǎn)速平穩(wěn)PMSM 與異步電動機相比,具有較低的慣性,對于一定的電動機轉(zhuǎn)矩具有較快的響應,即轉(zhuǎn)矩/慣性比高。
3)體積小、重量輕隨著高性能永磁材料的不斷應用,PMSM 的功率密度大大提高,與同容量異步電機相比,其體積和重量有較大的減少。
4)應用范圍廣、可靠性高在醫(yī)療器械、化工、輕紡、儀器儀表等領(lǐng)域均獲得應用。與直流電動機和電勵磁同步電動機相比,永磁同步電動機沒有電刷,簡化了結(jié)構(gòu),提高了可靠性。
3 永磁同步電動機控制策略
永磁同步電機的調(diào)速主要通過改變供電電源的頻率來實現(xiàn)。目前常用的變頻調(diào)速方式有轉(zhuǎn)速閉環(huán)恒壓頻比控制(v/f)、轉(zhuǎn)差頻率控制、基于磁場定向的矢量控制(Vector Control)以及直接轉(zhuǎn)矩控制(Direct Torque Control)。
3.1 轉(zhuǎn)速閉環(huán)恒壓頻比控制
轉(zhuǎn)速閉環(huán)恒壓頻比控制是一種最常用的變頻調(diào)速控制方法。該方法是通過控制V/f恒定,使磁通保持不變,并以控制轉(zhuǎn)差頻率來控制電機的轉(zhuǎn)矩和轉(zhuǎn)速。這種控制方法低速帶載能力不強,須對定子壓降實行補償,因該控制方法只控制了電機的氣隙磁通,不能調(diào)節(jié)轉(zhuǎn)矩,故性能不高。但該方法由于實現(xiàn)簡單、穩(wěn)定可靠,調(diào)速方便,所以在一些對動態(tài)性能要求不太高的場合,如對通風機、水泵等的控制,仍是首選的方法。
3.2 轉(zhuǎn)差頻率控制
轉(zhuǎn)差頻率控制的突出優(yōu)點就在于頻率控制環(huán)節(jié)的輸入是轉(zhuǎn)差信號,而頻率信號是由轉(zhuǎn)差信號與實際轉(zhuǎn)速信號相加后得到的,這樣,在轉(zhuǎn)速變化過程中,實際頻率隨著實際轉(zhuǎn)速同步地上升或者下降。盡管轉(zhuǎn)差頻率控制能夠在一定程度上控制電機轉(zhuǎn)矩,但它依據(jù)的只是穩(wěn)態(tài)模型,并不能真正控制動態(tài)過程中的轉(zhuǎn)矩,從而得不到很理想的動態(tài)控制性能。
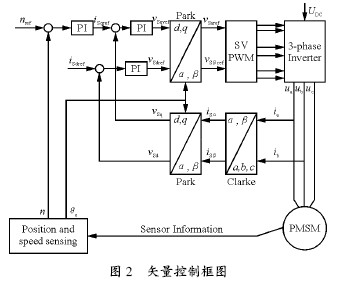
3.3 矢量控制
矢量控制框圖如圖2 所示。
1971 年,西門子工程師Balschke 首次提出矢量控制理論,使交流電機控制理論獲得了一次質(zhì)的飛躍。其基本思想為:以轉(zhuǎn)子磁鏈旋轉(zhuǎn)空間矢量為參考坐標,將定子電流分解為相互正交的兩個分量,一個與磁鏈同方向,代表定子電流勵磁分量,另一個與磁鏈方向正交,代表定子電流轉(zhuǎn)矩分量,分別對它們進行控制,獲得像直流電動機一樣良好的動態(tài)特性。因其控制結(jié)構(gòu)簡單,控制軟件實現(xiàn)較容易,已被廣泛應用到調(diào)速系統(tǒng)中。但矢量控制方法在實現(xiàn)時要進行復雜的坐標變換,并需準確觀測轉(zhuǎn)子磁鏈,而且對電機的參數(shù)依賴性很大,難以保證完全解耦,使控制效果大打折扣。
采用矢量控制理論進行控制時,具有和直流電動機類似的特性。矢量控制的優(yōu)點在于調(diào)速范圍寬,動態(tài)性能較好。不足之處是按轉(zhuǎn)子磁鏈定向會受電動機參數(shù)變化的影響而失真,從而降低了系統(tǒng)的調(diào)速性能。解決方法是采用智能化調(diào)節(jié)器可以提高系統(tǒng)的調(diào)速性能和魯棒性。
文獻[20]和文獻[21]采用PI 控制,文獻[20]中電流環(huán)、速度環(huán)均采用PI 調(diào)節(jié),由仿真結(jié)果得出:PI 控制器的參數(shù)對系統(tǒng)的性能有極大的影響,永磁同步電機是一個具有強耦合的非線性對象,很難用精確的數(shù)學模型描述,而PI 控制器是一種線性控制器,魯棒性不夠強,所以,在調(diào)速系統(tǒng)中難以達到令人滿意的調(diào)速性能,尤其是在對系統(tǒng)性能和控制精度要求較高的場合,這就需要對PI 算法進行改進,以達到更好的控制性能。文獻[21]通過多次仿真,在速度調(diào)節(jié)中只單純采用PI 調(diào)節(jié)效果并不理想,為此,提出了采用分段PI 速度調(diào)節(jié)的方法,即根據(jù)誤差量的大小分段確定參數(shù)Kp,Ki。在初期,可加大比例調(diào)節(jié)成分,隨著誤差減小適當加大積分系數(shù),這樣系統(tǒng)能較好地實現(xiàn)永磁同步電機的調(diào)速及其正反轉(zhuǎn)控制。
文獻[1]對PMSM的電壓空間矢量的弱磁控制方面所做的研究,提出一種基于空間矢量PWM(SVPWM)的PMSM 定子磁鏈弱磁控制方法,在電機轉(zhuǎn)速達到基本轉(zhuǎn)速之前采用最大轉(zhuǎn)矩/電流策略控制,超過基本轉(zhuǎn)速之后采用弱磁擴速的電流控制策略,使電機具有更大的調(diào)速空間,該策略可實現(xiàn)電壓矢量近似連續(xù)調(diào)節(jié),同傳統(tǒng)的有限的離散空間矢量相比,有效減小了PMSM的轉(zhuǎn)矩脈動,提高了系統(tǒng)的性能。
3.4 直接轉(zhuǎn)矩控制
直接轉(zhuǎn)矩控制(DTC)框圖如圖3 所示。
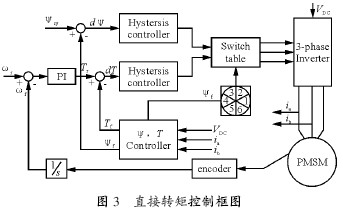
1985 年,Depenbrock 教授提出的高性能交流電機控制策略,摒棄了矢量控制的解耦思想,不需要將交流電動機與直流電動機作等效與轉(zhuǎn)化,省去了復雜的坐標變換;采用定子磁場定向,實現(xiàn)了在定子坐標系內(nèi)對電動機磁鏈、轉(zhuǎn)矩的直接觀察、控制,定子磁鏈的估計僅涉及定子電阻,減弱了對電機參數(shù)的依賴性,很大程度上克服了矢量控制的缺點。且控制簡單,轉(zhuǎn)矩響應快,動態(tài)性能好。開始時是使用于異步電機控制中,后來逐步引用于同步電機中。1997 年,L.zhong,M.F.Rahman 和Y.W.Hu 等人把直接轉(zhuǎn)矩控制與永磁同步電機結(jié)合起來,提出了基于永磁同步電機的直接轉(zhuǎn)矩控制理論,實現(xiàn)了永磁同步電機直接轉(zhuǎn)矩控制方案,并且成功地拓展到了弱磁恒功率范圍,取得了一系列成果。
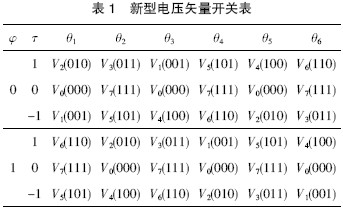
直接轉(zhuǎn)矩控制技術(shù)是繼矢量控制后發(fā)展起來的,最早應用在感應電機中,隨后應用到永磁同步電動機控制系統(tǒng)中。永磁同步電動機不能像異步電機那樣用零電壓矢量降低轉(zhuǎn)矩,而采用反向電壓減小轉(zhuǎn)矩,這樣會產(chǎn)生較大的轉(zhuǎn)矩波動。文獻[2]分析了零電壓矢量在異步電機和同步電機中的不同作用,構(gòu)造了一種應用零電壓矢量來減小轉(zhuǎn)矩的新型電壓矢量開關(guān)表,如表1 所列,可以改善轉(zhuǎn)矩脈動和系統(tǒng)性能。文獻[11]也構(gòu)造了一種新型的含零電壓矢量的控制開關(guān)表,改變了傳統(tǒng)的控制系統(tǒng)。并通過仿真結(jié)果表明,正確地使用零電壓矢量能夠有效減少轉(zhuǎn)矩脈動,改善系統(tǒng)性能。直接轉(zhuǎn)矩控制的系統(tǒng)能以較大的轉(zhuǎn)矩啟動,并且含零電壓矢量的系統(tǒng)的轉(zhuǎn)矩平穩(wěn)性較好,轉(zhuǎn)矩波動比較小,并且在擾動后能在較短的時間內(nèi)恢復穩(wěn)定。
傳統(tǒng)DTC 采用的是按一定規(guī)則從預制的開關(guān)表中選取近似合適的電壓空間矢量對電機轉(zhuǎn)矩和磁鏈進行控制,由于所選的空間電壓矢量有限,不同程度地導致DTC 系統(tǒng)出現(xiàn)較大的磁鏈和轉(zhuǎn)矩脈動。文獻[3]介紹分析了SVM(空間矢量調(diào)制)是在一個控制周期內(nèi),通過相鄰基本電壓矢量和零矢量合成,得到所需的任意電壓矢量,實現(xiàn)電壓矢量的線性連續(xù)可調(diào)。SVM DTC 控制可在不改變系統(tǒng)硬件結(jié)構(gòu)的條件下,獲得更多的連續(xù)變化的電壓空間矢量,進而實現(xiàn)對電機磁鏈和轉(zhuǎn)矩更精確的控制,從而降低轉(zhuǎn)矩脈動。
在改進PMSM 控制方法和性能上,文獻[4]和文獻[5]提出了新的方法,文獻[4]在矢量控制策略基礎上提出了一種高精度混合控制方法,綜合利用自控方式與他控方式各自的優(yōu)點,在動態(tài)情況下,采用自控方式對控制系統(tǒng)輸出電壓進行快速調(diào)節(jié),提高系統(tǒng)動態(tài)響應能力以及增強系統(tǒng)穩(wěn)定性,當電機進入穩(wěn)態(tài)運行時切換到他控方式,從而提高電機穩(wěn)態(tài)性能指標,減小轉(zhuǎn)速波動和轉(zhuǎn)矩脈動,兼顧調(diào)速系統(tǒng)動態(tài)性能和穩(wěn)態(tài)性能,取得了更好的控制效果。文獻[4]還對目前永磁同步電動機控制系統(tǒng)轉(zhuǎn)子初始位置檢測方法進行了分析與對比研究,給出基于漸變電壓矢量法的轉(zhuǎn)子初始位置檢測簡單有效的檢測方法,主要是因為當給定電壓矢量接近永磁體轉(zhuǎn)子軸線時,可能會出現(xiàn)方向判斷失誤的情況。可以采用表決機制,多次測量后確定檢測結(jié)果,以保證結(jié)果的正確性和更高的檢測精度。并將模糊控制、神經(jīng)網(wǎng)絡控制與傳統(tǒng)的PID控制器結(jié)合,使系統(tǒng)有更好的動、靜態(tài)特性。
文獻[5]從開關(guān)頻率優(yōu)化和電壓空間矢量合理選擇兩個方面提出了一種新的轉(zhuǎn)矩調(diào)節(jié)方法,即通過逆變器開關(guān)頻率PI 調(diào)節(jié)得到轉(zhuǎn)矩滯環(huán)比較器的滯環(huán)寬度值。這樣在充分利用功率器件開關(guān)頻率的同時不僅克服了圓形磁鏈軌跡對功率器件高開關(guān)頻率要求的缺陷,而且克服了在轉(zhuǎn)速變化過程中采用固定滯環(huán)寬度值帶來的功率器件開關(guān)頻率波動范圍大及由此造成低速轉(zhuǎn)矩調(diào)節(jié)性能下降的缺陷。
文獻[12]對永磁同步電機直接轉(zhuǎn)矩控制中磁鏈觀測這一關(guān)鍵技術(shù)進行了研究,設計了一種新型磁鏈觀測器———非線性正交反饋補償磁鏈觀測器。磁鏈觀測是直接轉(zhuǎn)矩控制技術(shù)中關(guān)鍵部分,直接關(guān)系到電機的運行性能和直接轉(zhuǎn)矩控制方案效果,適合永磁同步電機直接轉(zhuǎn)矩控制應用的新型非線性正交反饋補償磁鏈觀測器算法可以用式(1)表示。

通過仿真,采用的基于非線性正交反饋補償?shù)拇沛溣^測器不僅能在高速下準確觀測磁鏈,而且能有效地解決傳統(tǒng)電壓積分方法在低速時的不足和弊端,從而驗證了基于非線性正交反饋補償?shù)拇沛溣^測器在理論上的可行性。系統(tǒng)的動態(tài)響應快,穩(wěn)態(tài)運行平穩(wěn),電流正弦,磁鏈能夠運行在圓形軌跡上。

3.5 基于無傳感器控制
通常,高性能的調(diào)速系統(tǒng)離不開閉環(huán)控制,但速度傳感器的安裝帶來了系統(tǒng)成本增加、體積增大、可靠性降低等問題。因此無速度傳感器控制技術(shù)成為研究熱點,其核心是如何準確獲取電機的轉(zhuǎn)速信息。
文獻[14]指出,代表性的方案有:瞬時轉(zhuǎn)速估計法,PI 控制器法,模型參考自適應系統(tǒng)法,擴展卡曼濾波法,基于神經(jīng)網(wǎng)絡的方法。
文獻[6]提出了在無位置傳感器的條件下檢測轉(zhuǎn)子初始位置的方法,適用于凸極和隱極同步電動機,受電動機參數(shù)影響比較小,在靜止、低速、高速范圍內(nèi)均可以估計出轉(zhuǎn)子的實際位置,通過向電動機的定子繞組施加高頻檢測電壓,利用空間凸極效應即可確定轉(zhuǎn)子的初始位置。
文獻[15]指出,早先的無傳感器控制方法主要集中在高速條件下,有:磁鏈位置估算法,特點是簡單而易于實現(xiàn),但算法性能取決于電壓、電流的測量精度及電機參數(shù)準確性;擴展卡曼濾波法,可以直接獲得定子磁鏈矢量和轉(zhuǎn)子位置的估計值,能很好地抑制測量和擾動噪聲,但算法對電機參數(shù)有較強的依賴性,同時卡爾曼增益也很難確定。
文獻[15]針對表貼式永磁同步電動機,在任意同步旋轉(zhuǎn)坐標系上利用電機穩(wěn)態(tài)操作的結(jié)果估計反電動勢,進而實現(xiàn)了轉(zhuǎn)子位置和轉(zhuǎn)速的估計,采用的反電動勢常數(shù)補償算法,系統(tǒng)對反電勢參數(shù)的變化相當穩(wěn)健。該方法的位置和速度估計精度高,速度控制范圍寬。
文獻[13]介紹了針對內(nèi)嵌式永磁同步電動機的凸極原理,并且基于這個原理介紹了一種根據(jù)輸入電壓檢測電流大小的方法,實現(xiàn)簡便,且沒有依賴電機參數(shù),建立數(shù)學模型或要進行復雜計算等缺點。僅需要在原有的電機驅(qū)動電路的基礎上增加一套針對初始磁極位置檢測的程序即可。整個程序分為三個部分:第一部分是測量并比較0毅和180毅電角度的電壓矢量,并選擇一個大的電壓矢量作為起始的角度;第二部分將整個電氣360毅周期分為12 個區(qū)域,每30毅一格,從0毅或者180毅開始,測量給定電壓矢量的電流,在保證測到最大電流時,減少測量的步數(shù),使得測量的時間也盡可能的縮短;第三步則是進一步細分角度,利用二分法來精確的檢測磁極位置的角度。這種方法實現(xiàn)起來簡便,無須預知電機的參數(shù),無須增加硬件設備,僅須在每次啟動電機時導入相應程序即可。
4 永磁同步電機未來研究熱點
1)在材料技術(shù)方面,隨著半導體技術(shù)的不斷進步,使永磁同步電機體積能夠再減小。
2)在電機控制方面,研究如何進一步提高無速度傳感器直接轉(zhuǎn)矩控制性能。
3)有無速度傳感器控制的速度辨識的研究、矢量控制的魯棒性研究,直接轉(zhuǎn)矩中電壓矢量選擇智能化的研究。
4)永磁同步電機控制系統(tǒng)穩(wěn)定性的問題,研究哪些因素對穩(wěn)定性有影響。
參考文獻:
[1] 冷再興. 永磁同步電動機弱磁調(diào)速控制[D].華中科技大學,2006.
[2] 張昱,張興. 永磁同步電機直接轉(zhuǎn)矩控制系統(tǒng)的改進[J].合肥工業(yè)大學學報,2007.
[3] 徐華中,劉鵬. 一種改進的永磁同步電機直接轉(zhuǎn)矩控制仿真[J].武漢理工大學學報,2008.
[4] 朱洪海. 永磁同步電動機控制系統(tǒng)及其控制方法研究[D].浙江大學,2006.
[5] 許峻峰. 提高永磁同步電動機調(diào)速系統(tǒng)性能方法研究[D].西南交通大學,2005.
[6] 郭熠. 永磁同步電動機轉(zhuǎn)子初始位置檢測方法[J].微電機,2004.
[7] J S Kim and S K Sul.New Stand-still Position de-tection Strategy for PMSM Drive without Rotational Transducer[J].Conf. record of IEEE,QPEC,1994:363-369.
[8] D W Chung,J Kang,S K Sul.Initial Rotor Position Detection of PMSM at Standstill without Protational Transducer [J]. Electric Machines And Drivers,1999. International Conference IEMD 99.9-12,1999,(5):785-787.
[9] P L Jansen,R D Lorenz.Transducerless Position andVelocity Estimationin Induction Machines and Salientac
Machines [J]. IEEE Transactions on Industry Applications,1993,31(2):240.
[10] Yuhong Z,Kenneth A. Adaptive Flux and Speed Estimation for Induction Motors[C]. Proceedings of American Control Conference, San Diego, California,1999,2521-2525.
[11] 徐生林,鄭敏,盧航遠,楊成忠.永磁同步電機直接轉(zhuǎn)矩控制的改進與仿真[J].機電工程,2009,26(2):38-41.
[12] 查焱,芮延年,孟淮玉,杜海軍.永磁同步電機直接轉(zhuǎn)矩控制的磁鏈觀測研究[J].江蘇電器,2008,5:10-11.
[13] 季榮斌,范啟富,朱武標.一種新型的永磁同步電機磁極位置檢測方法[J]. 蘭州工業(yè)高等專科學校學報,
2009,16(1):26-28.
[14] 駱再飛,蔣靜坪,許振偉.交流伺服系統(tǒng)及其先進控制策略綜述[J].機床與液壓,2002,6:7-10.
[15] 曾岳南,毛宗源,羅彬,暨棉浩.永磁同步電機無位置速度傳感器控制[J].電力電子技術(shù),2006,40(4).
[16] 趙越嶺,王燕秋,王英麗.無速度傳感器直接轉(zhuǎn)矩控制系統(tǒng)的轉(zhuǎn)速估算方法綜述[J]. 遼寧工學院學報,
2003,23(6).
[17] Tajima Hetal. Speed Sensor-less Vector Control method for an Industry Drive System [J]. IEEE. PCC,Yoko-
Hama,1995: 1034-1039.
[18] 賈洪平,賀益康.永磁同步電機直接轉(zhuǎn)矩控制中零矢量的作用研究[J].電氣傳動,2006,36(4): 13-17.
[19] 郭緒猛,劉景林.永磁同步電機直接轉(zhuǎn)矩控制研究與仿真[J].微電機,2007,40(4): 12-14.
[20] 林輝,劉軍.基于矢量控制的永磁同步電機研究[J].電機設計,2009.
[21] 暨綿浩,曾岳南,曾建安,等.永磁同步電動機及其調(diào)速系統(tǒng)綜述和展望[J].電氣時代,2005,5: 20-23.
[22] 林立,黃聲華.基于矢量控制的高性能異步電機速度控制器的設計[J].電子技術(shù)應用,2006 (2): 102-105.
[23] Bouchikers,Capolinoga. Vector Control of a Permanent-Magnet Synchronous Motor Using AC-AC Matrix
Converter [J].IEEE Transactions on Power Electronics,1998,13 (6):1089-1099.
[24] 王春民,孫淑琴,安海忠,等.基于DSP永磁同步電動機矢量控制系統(tǒng)的設計[J].吉林大學學報:信息科學
版,2008,26 (4): 343-346.
[25] 林利華,胡育文.磁鏈觀測器的實現(xiàn)[J].電源世界,2004(4).
[26] 郭前崗,李耀華,孟彥京.現(xiàn)代交流傳動系統(tǒng)調(diào)速技術(shù)綜述[J].微計算機信息(測控自動化),2004,20(11).
[27] 李正熙,王占擴,楊立永.永磁同步電動機直接轉(zhuǎn)矩控制策略綜述[J].變頻器世界,2006.
[28] 謝運祥,盧柱強.基于MATLAB/Simulink 的永磁同步電機直接轉(zhuǎn)矩控制仿真建模[J]. 華南理工大學學報
(自然科學版),2004,32(1).
[29] 田淳,胡育文.永磁同步電機直接轉(zhuǎn)矩控制系統(tǒng)理論及控制方案的研究[J].電工技術(shù)學報,2002(2):8-11.
[30] 謝成祥.永磁同步電機直接轉(zhuǎn)矩控制系統(tǒng)的分析與仿真研究[J]. 華東船舶工業(yè)學院學報(自然科學版),
2004(6):39-43.