
FCS與DCS混合式集成控制系統(tǒng)研究
摘要: 控制系統(tǒng)由五十多年前的PCS( PneumatiCControl System)的第一代控制系統(tǒng),,經(jīng)歷了ACS(AnalogouSControl System),、CCS(ComputerControl System)和DCS(Distributed Control System),而發(fā)展成今天的第五代控制系統(tǒng)———現(xiàn)場總線控制系統(tǒng)FCS(FieldbuSControl System),。
Abstract:
Key words :
引 言
控制系統(tǒng)由五十多年前的PCS( PneumatiCControl System)的第一代控制系統(tǒng),,經(jīng)歷了ACS(AnalogouSControl System),、CCS(ComputerControl System)和DCS(Distributed Control System),而發(fā)展成今天的第五代控制系統(tǒng)———現(xiàn)場總線控制系統(tǒng)FCS(FieldbuSControl System),。
集散控制系統(tǒng)DCS由操作站,、控制站(監(jiān)視站)、應用模件與歷史模件,、通訊網(wǎng)絡和工程師站等組成,。DCS除采用高可靠性的軟硬件以及通信網(wǎng)絡、控制站等冗余措施外,,還使用故障檢測與診斷工程軟件,,可對生產(chǎn)工況進行監(jiān)測,從而及早發(fā)現(xiàn)故障,,及時采取措施,,提高了生產(chǎn)的安全性。
上世紀80年代后期,,在DCS的基礎上開始開發(fā)一種適用于工業(yè)環(huán)境的網(wǎng)絡結(jié)構(gòu)和網(wǎng)絡協(xié)議,,并實現(xiàn)傳感器、控制器層的通信,,這就是現(xiàn)場總線,。但研究工作進展緩慢,而且無國際標準可遵守,。國際電工委員會( IEC)于2000年1月正式公布了IEC61158現(xiàn)場總線全部技術標準,。但此標準中容納了8種互不兼容的通信協(xié)議。由于是妥協(xié)于各方面的既有利益,,并沒有實現(xiàn)完全統(tǒng)一國際標準的初衷。
CAN(ControllerArea Network)總線是現(xiàn)場總線的一種,,它一般采用典型的串行總線拓撲結(jié)構(gòu)進行通訊,,這種方式的位速率低于環(huán)形結(jié)構(gòu),但是結(jié)構(gòu)簡單,、成本低,、而且通信可靠。CAN總線因傳輸時間短,受干擾的概率低,,保證了通信的實時性,。CAN能對錯誤的來源進行正確定位,將永久的硬件錯誤從軟件錯誤中獨立出來,,其協(xié)議采用CRC檢驗,,并提供相應的錯誤處理功能,同時保證了數(shù)據(jù)通信的可靠性,。
混合式控制系統(tǒng)的提出
現(xiàn)場總線控制系統(tǒng)FCS應該與集散控制系統(tǒng)DCS相互兼容,。首先從工程成本與效益看,現(xiàn)場總線的優(yōu)勢是良好的互操作性,,結(jié)構(gòu)簡單,,布線費用低;控制功能分散,,靈活可靠,,以及現(xiàn)場信息豐富。然而這些優(yōu)勢是建立在FCS系統(tǒng)初裝的前提下,,倘若企業(yè)建立有完善的DCS,,要向FCS過渡,則必須仔細考慮現(xiàn)有投資對已有投資的回報率,。充分利用已有的DCS設施,,現(xiàn)有DCS的布線以及成熟的DCS控制管理方式來實現(xiàn)FCS是首選之途。雖然現(xiàn)場總線對已有的數(shù)字現(xiàn)場協(xié)議有優(yōu)勢可言,,但向其過渡的代價與風險比較大,。再者,從技術的繼承及控制手段上,,也要求FCS與DCS應相互兼容,。FCS實現(xiàn)控制功能下移至現(xiàn)場層,使DCS的多層網(wǎng)絡被扁平化,,各個現(xiàn)場設備節(jié)點的獨立功能得以加強,,因此,在FCS中有必要增加和完善現(xiàn)場子層設備間的數(shù)據(jù)通訊功能,。
FCS和DCS的集成主要包括三個方面:
(1)FCS和DCS輸入輸出總線的集成
DCS的控制站主要由控制單元(Control Unit,,CU)和輸入輸出單元( Input Output Unit,IOU)組成,,這兩個單元之間通過I/O總線連接,。在I/O總線上掛接現(xiàn)場總線接口板或現(xiàn)場總線接口單元(Field bus Interface Unit,F(xiàn)IU),,如圖1所示?,F(xiàn)場儀表或現(xiàn)場設備通過現(xiàn)場總線與HU 通信,,F(xiàn)IU 再通過I/O總線與DCS的控制單元通信。這樣便實現(xiàn)了現(xiàn)場總線和DCS輸入輸出總線的集成,,即現(xiàn)場總線和DCS控制站的集成,。
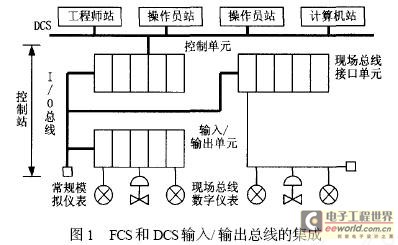
現(xiàn)場總線和DCS輸入輸出總線的集成具有以下3個特點:
①除了安裝現(xiàn)場總線接口板或現(xiàn)場總線接口單元外,不用對DCS再做其它變更,;
②充分利用DCS控制站的運算和控制功能塊,,因為初期開發(fā)的現(xiàn)場總線儀表中的功能塊數(shù)量和種類有限;
③利用已有DCS的技術和資源,,投資少,,見效快,便于推廣現(xiàn)場總線的應用,。
(2)FCS和DCS網(wǎng)絡的集成
在DCS控制站的I/O總線上集成現(xiàn)場總線是一種最基本的初級集成技術,,還可以在DCS的更高一層集成,即在DCS網(wǎng)絡(DCSnet)上集成現(xiàn)場總線,,如圖2所示?,F(xiàn)場總線服務器(FieldbuSServer,F(xiàn)S)掛接在DCS網(wǎng)絡上,,F(xiàn)S是一臺完整的計算機,,并安裝了現(xiàn)場總線接口卡和DCS網(wǎng)絡接口卡。
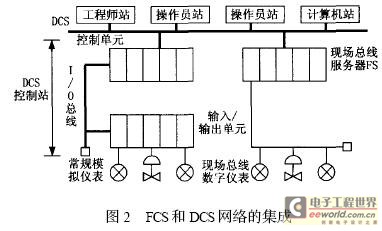
現(xiàn)場設備或現(xiàn)場儀表通過現(xiàn)場總線與其接口卡通信,,現(xiàn)場儀表中的輸入,、輸出、控制和運算等功能塊可以在現(xiàn)場總線上獨立構(gòu)成控制回路,,而不必借用DCS控制站的功能?,F(xiàn)場總線服務器通過其DCS網(wǎng)絡接口卡與DCS網(wǎng)絡(DCSnet)通信,也可以把FCS看作DCS網(wǎng)絡上的一個節(jié)點或DCS的一臺設備,。這樣FCS和DCS之間可以互相共享資源,。FCS直接借用DCS的操作員站或工程師站。
FCS和DCS網(wǎng)絡的集成具有以下4個特點:①除了安裝現(xiàn)場總線服務器外,,不用對DCS再做其它變更,;② 在現(xiàn)場總線上可以獨立構(gòu)成控制回路,實現(xiàn)徹底的分散控制,;③現(xiàn)場總線服務器中一些高級功能塊,,可以與現(xiàn)場儀表中的基本功能塊統(tǒng)一組態(tài),構(gòu)成復雜控制回路,;④利用已有DCS的部分資源,,投資少、見效快,,便于推廣現(xiàn)場總線的應用,。
(3)FCS和DCS的系統(tǒng)集成
FCS和DCS的系統(tǒng)集成可以有兩種方式:一種是FCS網(wǎng)絡(FCSnet)通過網(wǎng)關(Gateway)與DCS網(wǎng)絡(DCSnet)集成,在各自網(wǎng)絡上直接交換信息,,如圖3所示,;另一種是FCS和DCS分別掛接在企業(yè)網(wǎng)絡( Intranet)上,通過企業(yè)網(wǎng)絡間接交換信息,。
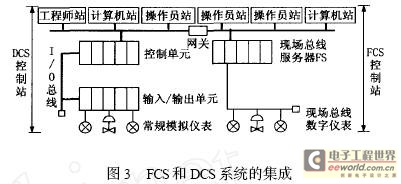
FCS和DCS的集成具有以下4個特點:①獨立安裝FCS,,對DCS幾乎不做任何變更,只需在DCSnet上接一臺網(wǎng)關,;②FCS是一個完整的系統(tǒng),,不必借用比DCS的資源;③既有利于FCS的發(fā)展和推廣,,又有利于充分利用現(xiàn)有DCS的資源,;④系統(tǒng)投資大,適用于新建裝置,。
基于混合控制的多軸超聲檢測系統(tǒng)
多軸超聲檢測系統(tǒng)要完成的主要功能如下:多軸聯(lián)動超聲自動掃查檢測,;棒材的螺旋面成像、橫截面成像和縱截面成像,;鍛件和碳纖維的平面掃描,;準三維掃描成像;A/B/C成像和分析,;缺陷定量及其缺陷圖像分析,;缺陷定位及標記等。
該超聲檢測系統(tǒng)的各個I/O組件及各主件內(nèi)部的各模塊之間的數(shù)據(jù)聯(lián)系采用了傳統(tǒng)的并行網(wǎng)絡,,系統(tǒng)控制網(wǎng)絡引入了CANbus,,通過該總線可以實現(xiàn)對現(xiàn)場伺服控制器直接控制,同時還可實現(xiàn)該系統(tǒng)同其他超聲設備間的數(shù)據(jù)交換,。如果采用多主模式還可以向上融入系統(tǒng)網(wǎng)絡,。多軸超聲檢測系統(tǒng)的結(jié)構(gòu)示意圖如圖4。
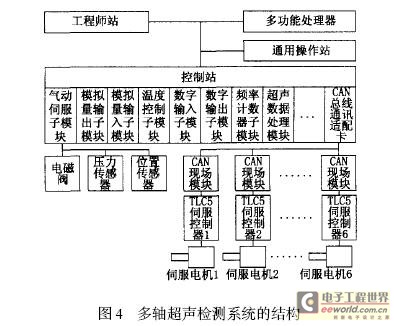
為了完成多軸聯(lián)動超聲自動掃查檢測,,采用CAN總線對多臺伺服電機進行控制,。系統(tǒng)中選用安裝在控制站中的CAN總線適配卡與CAN總線相連,實現(xiàn)現(xiàn)場總線和DCS輸入輸出總線集成,,現(xiàn)場節(jié)點是帶有CAN控制端口的6只伺服控制器,,通過伺服控制器來完成對外圍的伺服電機的控制,實現(xiàn)各種點位運動,。采用德國百格拉公司的TCL6系列控制器,,該型控制器除了具有伺服控制器的全部基本功能外,它還內(nèi)置可編程邏輯控制器(PLC),,可以編程控制,,通過在TCL6基礎上添加CAN通訊接口,,實現(xiàn)遠程控制。
基于現(xiàn)場總線的通訊和控制策略:首先初始化CAN總線適配卡和CAN通訊接口,;實現(xiàn)總線適配卡與控制器之間的通訊,。其次,通過總線傳輸數(shù)據(jù)到控制器中,,PC機先把需要下傳的數(shù)據(jù)按一定的數(shù)據(jù)結(jié)構(gòu)寫入PCCAN卡中,,PCCAN卡把該數(shù)據(jù)傳送到總線上,當與總線數(shù)據(jù)中的包含的目的地址相同的控制器探測到總線上的該數(shù)據(jù),,開始接受該數(shù)據(jù)并檢查數(shù)據(jù)在傳送中是否被破壞,,如完整將執(zhí)行該指令,同時向PCCAN傳送肯定的回答信息,。當通訊建立后,,電機按指令完成動作,通過PLC可以把固定的運動方式固化在控制器中,。為了減輕總線的通訊壓力,,通過PLC編程來完成主要的運動控制工作。例如,,在已知運動軌跡的情況下,,采用電子齒輪比模式時,把已知運動軌跡分段并把每段的電子齒輪比一起編入特定的PLC程序段中,,完成以主軸電機為主的隨動控制,。
實際運用中,只需從總線發(fā)出一個開始的廣播信號,,下屬電機的運動控制就由PLC單獨完成,,PLC通過計算光電編碼器反饋的信號,適時調(diào)用預制的電子齒輪比來完成復雜的運動,。這種處理方式就比上位機通過總線實時訪問光電編碼器的信號來改變每臺電機的電子齒輪要簡單,,總線只需按照監(jiān)視界面讀取電機位置狀態(tài)即可。采用這樣的設計可減少總線50%的通訊任務,,也減輕了上位機的工作強度,,以便上位機有更多的資源解決其它運算任務。
該系統(tǒng)能夠較好完成多功能檢測系統(tǒng)的要求,,由于選擇了總線控制,,使系統(tǒng)較以前的控制方式可靠性得到大大提高,同時還連線簡化,。同時因為內(nèi)置PLC的伺服控制器的運用,,這使得上位機的一部分工作移到下位機處理,上位機就有了更多的資源來進行相應的圖像處理等工作。
結(jié) 論
根據(jù)測控系統(tǒng)中FCS與DCS的特點,,本文分析了FCS與DCS的控制機理和應用現(xiàn)狀,,提出了“FCS和DCS輸入輸出總線的集成”、“FCS和DCS網(wǎng)絡的集成”和“FCS和DCS的集成”三種混合式控制模型,,并對混合式控制模型采用的控制策略和通訊機理做了研究,。通過多軸超聲檢測系統(tǒng)項目的研究和現(xiàn)場實施驗證了FCS和DCS的集成模型的可行性,并對該模型在項目實施應用過程遇到的技術難點作了詳細闡述,。
控制系統(tǒng)由五十多年前的PCS( PneumatiCControl System)的第一代控制系統(tǒng),,經(jīng)歷了ACS(AnalogouSControl System),、CCS(ComputerControl System)和DCS(Distributed Control System),而發(fā)展成今天的第五代控制系統(tǒng)———現(xiàn)場總線控制系統(tǒng)FCS(FieldbuSControl System),。
集散控制系統(tǒng)DCS由操作站,、控制站(監(jiān)視站)、應用模件與歷史模件,、通訊網(wǎng)絡和工程師站等組成,。DCS除采用高可靠性的軟硬件以及通信網(wǎng)絡、控制站等冗余措施外,,還使用故障檢測與診斷工程軟件,,可對生產(chǎn)工況進行監(jiān)測,從而及早發(fā)現(xiàn)故障,,及時采取措施,,提高了生產(chǎn)的安全性。
上世紀80年代后期,,在DCS的基礎上開始開發(fā)一種適用于工業(yè)環(huán)境的網(wǎng)絡結(jié)構(gòu)和網(wǎng)絡協(xié)議,,并實現(xiàn)傳感器、控制器層的通信,,這就是現(xiàn)場總線,。但研究工作進展緩慢,而且無國際標準可遵守,。國際電工委員會( IEC)于2000年1月正式公布了IEC61158現(xiàn)場總線全部技術標準,。但此標準中容納了8種互不兼容的通信協(xié)議。由于是妥協(xié)于各方面的既有利益,,并沒有實現(xiàn)完全統(tǒng)一國際標準的初衷。
CAN(ControllerArea Network)總線是現(xiàn)場總線的一種,,它一般采用典型的串行總線拓撲結(jié)構(gòu)進行通訊,,這種方式的位速率低于環(huán)形結(jié)構(gòu),但是結(jié)構(gòu)簡單,、成本低,、而且通信可靠。CAN總線因傳輸時間短,受干擾的概率低,,保證了通信的實時性,。CAN能對錯誤的來源進行正確定位,將永久的硬件錯誤從軟件錯誤中獨立出來,,其協(xié)議采用CRC檢驗,,并提供相應的錯誤處理功能,同時保證了數(shù)據(jù)通信的可靠性,。
混合式控制系統(tǒng)的提出
現(xiàn)場總線控制系統(tǒng)FCS應該與集散控制系統(tǒng)DCS相互兼容,。首先從工程成本與效益看,現(xiàn)場總線的優(yōu)勢是良好的互操作性,,結(jié)構(gòu)簡單,,布線費用低;控制功能分散,,靈活可靠,,以及現(xiàn)場信息豐富。然而這些優(yōu)勢是建立在FCS系統(tǒng)初裝的前提下,,倘若企業(yè)建立有完善的DCS,,要向FCS過渡,則必須仔細考慮現(xiàn)有投資對已有投資的回報率,。充分利用已有的DCS設施,,現(xiàn)有DCS的布線以及成熟的DCS控制管理方式來實現(xiàn)FCS是首選之途。雖然現(xiàn)場總線對已有的數(shù)字現(xiàn)場協(xié)議有優(yōu)勢可言,,但向其過渡的代價與風險比較大,。再者,從技術的繼承及控制手段上,,也要求FCS與DCS應相互兼容,。FCS實現(xiàn)控制功能下移至現(xiàn)場層,使DCS的多層網(wǎng)絡被扁平化,,各個現(xiàn)場設備節(jié)點的獨立功能得以加強,,因此,在FCS中有必要增加和完善現(xiàn)場子層設備間的數(shù)據(jù)通訊功能,。
FCS和DCS的集成主要包括三個方面:
(1)FCS和DCS輸入輸出總線的集成
DCS的控制站主要由控制單元(Control Unit,,CU)和輸入輸出單元( Input Output Unit,IOU)組成,,這兩個單元之間通過I/O總線連接,。在I/O總線上掛接現(xiàn)場總線接口板或現(xiàn)場總線接口單元(Field bus Interface Unit,F(xiàn)IU),,如圖1所示?,F(xiàn)場儀表或現(xiàn)場設備通過現(xiàn)場總線與HU 通信,,F(xiàn)IU 再通過I/O總線與DCS的控制單元通信。這樣便實現(xiàn)了現(xiàn)場總線和DCS輸入輸出總線的集成,,即現(xiàn)場總線和DCS控制站的集成,。
現(xiàn)場總線和DCS輸入輸出總線的集成具有以下3個特點:
①除了安裝現(xiàn)場總線接口板或現(xiàn)場總線接口單元外,不用對DCS再做其它變更,;
②充分利用DCS控制站的運算和控制功能塊,,因為初期開發(fā)的現(xiàn)場總線儀表中的功能塊數(shù)量和種類有限;
③利用已有DCS的技術和資源,,投資少,,見效快,便于推廣現(xiàn)場總線的應用,。
(2)FCS和DCS網(wǎng)絡的集成
在DCS控制站的I/O總線上集成現(xiàn)場總線是一種最基本的初級集成技術,,還可以在DCS的更高一層集成,即在DCS網(wǎng)絡(DCSnet)上集成現(xiàn)場總線,,如圖2所示?,F(xiàn)場總線服務器(FieldbuSServer,F(xiàn)S)掛接在DCS網(wǎng)絡上,,F(xiàn)S是一臺完整的計算機,,并安裝了現(xiàn)場總線接口卡和DCS網(wǎng)絡接口卡。
現(xiàn)場設備或現(xiàn)場儀表通過現(xiàn)場總線與其接口卡通信,,現(xiàn)場儀表中的輸入,、輸出、控制和運算等功能塊可以在現(xiàn)場總線上獨立構(gòu)成控制回路,,而不必借用DCS控制站的功能?,F(xiàn)場總線服務器通過其DCS網(wǎng)絡接口卡與DCS網(wǎng)絡(DCSnet)通信,也可以把FCS看作DCS網(wǎng)絡上的一個節(jié)點或DCS的一臺設備,。這樣FCS和DCS之間可以互相共享資源,。FCS直接借用DCS的操作員站或工程師站。
FCS和DCS網(wǎng)絡的集成具有以下4個特點:①除了安裝現(xiàn)場總線服務器外,,不用對DCS再做其它變更,;② 在現(xiàn)場總線上可以獨立構(gòu)成控制回路,實現(xiàn)徹底的分散控制,;③現(xiàn)場總線服務器中一些高級功能塊,,可以與現(xiàn)場儀表中的基本功能塊統(tǒng)一組態(tài),構(gòu)成復雜控制回路,;④利用已有DCS的部分資源,,投資少、見效快,,便于推廣現(xiàn)場總線的應用,。
(3)FCS和DCS的系統(tǒng)集成
FCS和DCS的系統(tǒng)集成可以有兩種方式:一種是FCS網(wǎng)絡(FCSnet)通過網(wǎng)關(Gateway)與DCS網(wǎng)絡(DCSnet)集成,在各自網(wǎng)絡上直接交換信息,,如圖3所示,;另一種是FCS和DCS分別掛接在企業(yè)網(wǎng)絡( Intranet)上,通過企業(yè)網(wǎng)絡間接交換信息,。
FCS和DCS的集成具有以下4個特點:①獨立安裝FCS,,對DCS幾乎不做任何變更,只需在DCSnet上接一臺網(wǎng)關,;②FCS是一個完整的系統(tǒng),,不必借用比DCS的資源;③既有利于FCS的發(fā)展和推廣,,又有利于充分利用現(xiàn)有DCS的資源,;④系統(tǒng)投資大,適用于新建裝置,。
基于混合控制的多軸超聲檢測系統(tǒng)
多軸超聲檢測系統(tǒng)要完成的主要功能如下:多軸聯(lián)動超聲自動掃查檢測,;棒材的螺旋面成像、橫截面成像和縱截面成像,;鍛件和碳纖維的平面掃描,;準三維掃描成像;A/B/C成像和分析,;缺陷定量及其缺陷圖像分析,;缺陷定位及標記等。
該超聲檢測系統(tǒng)的各個I/O組件及各主件內(nèi)部的各模塊之間的數(shù)據(jù)聯(lián)系采用了傳統(tǒng)的并行網(wǎng)絡,,系統(tǒng)控制網(wǎng)絡引入了CANbus,,通過該總線可以實現(xiàn)對現(xiàn)場伺服控制器直接控制,同時還可實現(xiàn)該系統(tǒng)同其他超聲設備間的數(shù)據(jù)交換,。如果采用多主模式還可以向上融入系統(tǒng)網(wǎng)絡,。多軸超聲檢測系統(tǒng)的結(jié)構(gòu)示意圖如圖4。
為了完成多軸聯(lián)動超聲自動掃查檢測,,采用CAN總線對多臺伺服電機進行控制,。系統(tǒng)中選用安裝在控制站中的CAN總線適配卡與CAN總線相連,實現(xiàn)現(xiàn)場總線和DCS輸入輸出總線集成,,現(xiàn)場節(jié)點是帶有CAN控制端口的6只伺服控制器,,通過伺服控制器來完成對外圍的伺服電機的控制,實現(xiàn)各種點位運動,。采用德國百格拉公司的TCL6系列控制器,,該型控制器除了具有伺服控制器的全部基本功能外,它還內(nèi)置可編程邏輯控制器(PLC),,可以編程控制,,通過在TCL6基礎上添加CAN通訊接口,,實現(xiàn)遠程控制。
基于現(xiàn)場總線的通訊和控制策略:首先初始化CAN總線適配卡和CAN通訊接口,;實現(xiàn)總線適配卡與控制器之間的通訊,。其次,通過總線傳輸數(shù)據(jù)到控制器中,,PC機先把需要下傳的數(shù)據(jù)按一定的數(shù)據(jù)結(jié)構(gòu)寫入PCCAN卡中,,PCCAN卡把該數(shù)據(jù)傳送到總線上,當與總線數(shù)據(jù)中的包含的目的地址相同的控制器探測到總線上的該數(shù)據(jù),,開始接受該數(shù)據(jù)并檢查數(shù)據(jù)在傳送中是否被破壞,,如完整將執(zhí)行該指令,同時向PCCAN傳送肯定的回答信息,。當通訊建立后,,電機按指令完成動作,通過PLC可以把固定的運動方式固化在控制器中,。為了減輕總線的通訊壓力,,通過PLC編程來完成主要的運動控制工作。例如,,在已知運動軌跡的情況下,,采用電子齒輪比模式時,把已知運動軌跡分段并把每段的電子齒輪比一起編入特定的PLC程序段中,,完成以主軸電機為主的隨動控制,。
實際運用中,只需從總線發(fā)出一個開始的廣播信號,,下屬電機的運動控制就由PLC單獨完成,,PLC通過計算光電編碼器反饋的信號,適時調(diào)用預制的電子齒輪比來完成復雜的運動,。這種處理方式就比上位機通過總線實時訪問光電編碼器的信號來改變每臺電機的電子齒輪要簡單,,總線只需按照監(jiān)視界面讀取電機位置狀態(tài)即可。采用這樣的設計可減少總線50%的通訊任務,,也減輕了上位機的工作強度,,以便上位機有更多的資源解決其它運算任務。
該系統(tǒng)能夠較好完成多功能檢測系統(tǒng)的要求,,由于選擇了總線控制,,使系統(tǒng)較以前的控制方式可靠性得到大大提高,同時還連線簡化,。同時因為內(nèi)置PLC的伺服控制器的運用,,這使得上位機的一部分工作移到下位機處理,上位機就有了更多的資源來進行相應的圖像處理等工作。
結(jié) 論
根據(jù)測控系統(tǒng)中FCS與DCS的特點,,本文分析了FCS與DCS的控制機理和應用現(xiàn)狀,,提出了“FCS和DCS輸入輸出總線的集成”、“FCS和DCS網(wǎng)絡的集成”和“FCS和DCS的集成”三種混合式控制模型,,并對混合式控制模型采用的控制策略和通訊機理做了研究,。通過多軸超聲檢測系統(tǒng)項目的研究和現(xiàn)場實施驗證了FCS和DCS的集成模型的可行性,并對該模型在項目實施應用過程遇到的技術難點作了詳細闡述,。
此內(nèi)容為AET網(wǎng)站原創(chuàng),未經(jīng)授權禁止轉(zhuǎn)載,。