作 者:河南工業(yè)大學(xué) 尚鳳玲 岳龍旺 田 勇 岳 威
引言
近20年來,在微創(chuàng)外科及其市場需求的驅(qū)動下,將先進(jìn)機(jī)器人技術(shù)、計(jì)算機(jī)技術(shù)、控制技術(shù)、遠(yuǎn)程通訊技術(shù)、圖形圖像技術(shù)等有機(jī)結(jié)合起來的計(jì)算機(jī)輔助機(jī)器人微創(chuàng)手術(shù)系統(tǒng)得到了迅速的發(fā)展。與人類相比,機(jī)器人具有狀態(tài)穩(wěn)定、定位準(zhǔn)確、靈巧性好、工作范圍大、不怕輻射和病菌感染等優(yōu)勢[1]。這將給2l世紀(jì)外科手術(shù)領(lǐng)域帶來一場新的技術(shù)革命。
微創(chuàng)外科手術(shù)是指外科醫(yī)生在病人身體上開四個(gè)孔(1cm),一個(gè)用于插入內(nèi)窺鏡,另兩個(gè)用于插入細(xì)長的手術(shù)工具[2],剩下的一個(gè)孔用于輔助操作。該技術(shù)可以實(shí)現(xiàn)手術(shù)的最少損傷、減少手術(shù)并發(fā)癥、縮短手術(shù)后康復(fù)時(shí)間,降低醫(yī)療費(fèi)用。因此,受到醫(yī)生和患者的普遍歡迎,是外科手術(shù)發(fā)展的必然趨勢,具有廣闊的應(yīng)用前景。
由于受到工作空間的限制,微創(chuàng)手術(shù)難度大,時(shí)間長。現(xiàn)有微創(chuàng)手術(shù)機(jī)器人系統(tǒng)都是基于傳統(tǒng)“纏繞打結(jié)法[3,4]”進(jìn)行縫合打結(jié)的。由于存在線圈從工具端部滑脫,張緊力不容易控制等問題,導(dǎo)致縫合線打結(jié)一次成功率低,手術(shù)時(shí)間長,縫合打結(jié)效果差。為了解決傳統(tǒng)“纏繞打結(jié)法”不適合機(jī)器人縫合打結(jié)的問題,本文提出一種新型的適合機(jī)器人縫合打結(jié)的“扭轉(zhuǎn)打結(jié)法”,基于該方法設(shè)計(jì)出新型的微創(chuàng)手術(shù)機(jī)器人系統(tǒng)。
扭轉(zhuǎn)打結(jié)法
“扭轉(zhuǎn)打結(jié)法”[5]既是通過夾持工具的旋轉(zhuǎn)使縫合線產(chǎn)生扭轉(zhuǎn),同時(shí)扭轉(zhuǎn)可以轉(zhuǎn)化為絞擰,形成打結(jié)所需的圓環(huán)的打結(jié)方法。
用“扭轉(zhuǎn)打結(jié)法”進(jìn)行縫合打結(jié)的一般步驟如圖1所示。
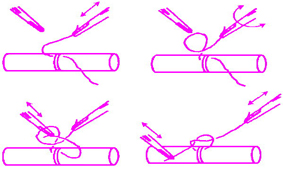
圖1 “扭轉(zhuǎn)打結(jié)”法打結(jié)過程
從圖1中可以看出,采用“扭轉(zhuǎn)打結(jié)法”在打結(jié)過程中,在縫合線兩端夾持點(diǎn)相互靠近時(shí),縫合線由“扭轉(zhuǎn)”轉(zhuǎn)化為“絞擰”;而當(dāng)兩夾持點(diǎn)相互遠(yuǎn)離時(shí),縫合線由“絞擰”轉(zhuǎn)化為“扭轉(zhuǎn)”。通過末端工具電機(jī)旋轉(zhuǎn)便能完成這個(gè)動作要求,且左右工具之間沒有相對的位置與姿態(tài)的變化,因此不受工作空間大小的影響,也不會因縫合線的張緊力而損傷血管。
機(jī)器人系統(tǒng)機(jī)構(gòu)設(shè)計(jì)
“扭轉(zhuǎn)打結(jié)法”通過對縫合線施加端部扭矩實(shí)現(xiàn)縫合線形狀的改變,形成打結(jié)所需的線圈,其運(yùn)動形式包括沿軸向的往復(fù)運(yùn)動、繞軸向的旋轉(zhuǎn)運(yùn)動和夾持工具的開合運(yùn)動。為了防止誤操作造成對病人的傷害,應(yīng)該實(shí)現(xiàn)基于機(jī)構(gòu)的定點(diǎn)運(yùn)動。系統(tǒng)原理圖如圖2所示。
該系統(tǒng)為雙臂機(jī)構(gòu),每個(gè)機(jī)械臂有5個(gè)自由度,分別為繞r軸、v軸、z軸的轉(zhuǎn)動,繞u軸曲線移動和沿v軸的手術(shù)器械的直線移動。其中,z軸和r軸的轉(zhuǎn)動為擺動,v軸的轉(zhuǎn)動為手術(shù)器械回轉(zhuǎn)。通過u軸和r軸實(shí)現(xiàn)基于機(jī)構(gòu)的定點(diǎn)(切口)運(yùn)動,通過v軸和z軸轉(zhuǎn)動實(shí)現(xiàn)末端工作裝置的姿態(tài)變化。
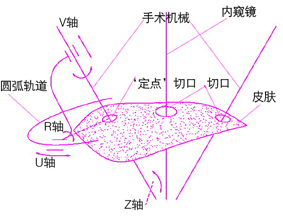
圖2 機(jī)械臂結(jié)構(gòu)原理
各部分結(jié)構(gòu)的設(shè)計(jì)
u軸曲線移動和r軸擺動結(jié)構(gòu)的設(shè)計(jì)
微創(chuàng)手術(shù)是通過體表切口將手術(shù)器械伸入體內(nèi)進(jìn)行手術(shù)的,為防止誤操作造成對切口的損傷,系統(tǒng)應(yīng)具備定點(diǎn)運(yùn)動特性。在機(jī)構(gòu)設(shè)計(jì)過程中,采用半圓弧軌道機(jī)構(gòu)和軸直接驅(qū)動擺動機(jī)構(gòu)實(shí)現(xiàn)系統(tǒng)的定點(diǎn)運(yùn)動。
半圓弧軌道機(jī)構(gòu)如圖3,為實(shí)現(xiàn)“定點(diǎn)”運(yùn)動,只要確保患者的體表切口位于圓弧軌道的圓心處即可。這種結(jié)構(gòu)簡單,容易實(shí)現(xiàn),驅(qū)動機(jī)構(gòu)可以選擇具有傳動準(zhǔn)確、可靠、運(yùn)轉(zhuǎn)平穩(wěn)、承載能力大、體積小、效率高等優(yōu)點(diǎn)的齒輪傳動。在圓弧軌道外側(cè)表面上加工成齒形結(jié)構(gòu),把動力源放置于軌道上面的滑塊上,小齒輪的運(yùn)動帶動滑塊沿u軸曲線移動。
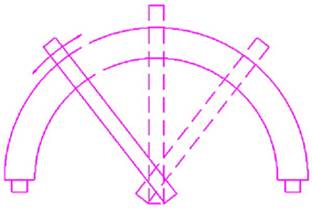
圖3 圓弧軌道機(jī)構(gòu)
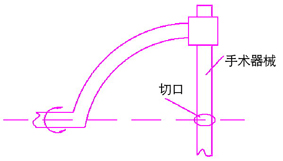
圖4 軸直接驅(qū)動擺動機(jī)構(gòu)
軸直接驅(qū)動擺動如圖4,實(shí)現(xiàn)軸擺動的軸線過圓弧軌道的圓心即患者體表切口也可實(shí)現(xiàn)“定點(diǎn)”運(yùn)動。
此機(jī)構(gòu)的微型減速電機(jī)安置在滑塊上,安裝時(shí)要保證輸出軸線過圓弧軌道的圓心,其結(jié)構(gòu)簡單,驅(qū)動方便。所以在實(shí)現(xiàn)繞r軸的轉(zhuǎn)動中選用這種機(jī)構(gòu)。
v軸移動結(jié)構(gòu)的設(shè)計(jì)
可以實(shí)現(xiàn)直線運(yùn)動的機(jī)構(gòu)主要有:螺旋機(jī)構(gòu)、曲柄滑塊機(jī)構(gòu)、有特定尺寸的四桿機(jī)構(gòu)、鏈傳動和齒輪-齒條機(jī)構(gòu)等幾種機(jī)構(gòu)。
v軸移動要求手術(shù)器械做往復(fù)直線運(yùn)動,結(jié)合各種機(jī)構(gòu)運(yùn)動特點(diǎn),最后選用齒輪-齒條機(jī)構(gòu)。
齒條的一端用微型圓錐滾動軸承連接在手術(shù)器械上,一端卡在套筒上,此機(jī)構(gòu)手術(shù)器械便于拆裝。
v軸轉(zhuǎn)動和z軸擺動結(jié)構(gòu)的設(shè)計(jì)
手術(shù)器械自身的回轉(zhuǎn)機(jī)構(gòu)設(shè)計(jì):為了減輕手術(shù)器械自身的質(zhì)量,以及體積限制,盡量選用結(jié)構(gòu)比較簡單的結(jié)構(gòu),并盡可能緊湊。v軸轉(zhuǎn)動選用微型減速電機(jī)直接帶動手術(shù)器械實(shí)現(xiàn)。微型減速電機(jī)安置在套筒上,再把套筒與齒條固連,如圖5所示。
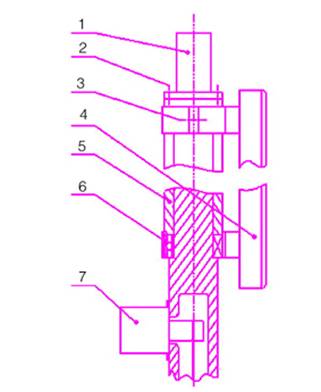
1—微型減速電機(jī); 2、3—8xm1;4—齒條;
5—套筒;6—678zz軸承; 7—微型減速電機(jī)。
圖5 v軸轉(zhuǎn)動和z軸擺動
z軸擺動機(jī)構(gòu)的設(shè)計(jì):為了減少進(jìn)入人體內(nèi)手術(shù)器械的直徑,把腕部的擺動控制系統(tǒng)設(shè)置在切口外部,這樣使控制部分與腕部有一定的距離,可以采用絲傳動來實(shí)現(xiàn)z軸擺動。不僅可以增加從手的精度和剛度,還能使從手結(jié)構(gòu)緊湊、自重輕、剛度高。
為了防止機(jī)構(gòu)運(yùn)動時(shí)引起末端工具的開合及其姿態(tài)的變化,絲傳動原理如圖6所示。
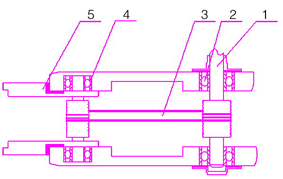
1—軸驅(qū)動軸;2、4—深溝球軸承;
3—鋼絲;5—末端工具。
圖6 走絲方法
運(yùn)動學(xué)分析
運(yùn)動學(xué)正解
按照d-h法嚴(yán)格建立桿件坐標(biāo)系及各關(guān)節(jié)的參數(shù),分別如圖7和如表1所示。
表1 微創(chuàng)縫合機(jī)器人的d-h參數(shù)
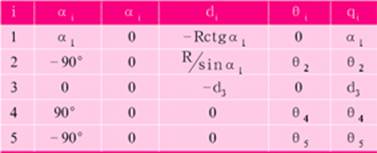
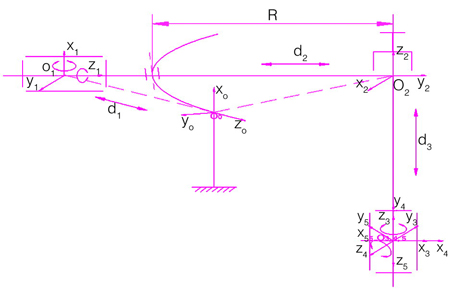
圖7 微創(chuàng)縫合機(jī)器人結(jié)構(gòu)
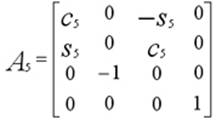
然后根據(jù)各關(guān)節(jié)參數(shù)以及通過matlab進(jìn)行矩陣計(jì)算,可求得各桿系的轉(zhuǎn)換矩陣以及機(jī)器人末端在基礎(chǔ)坐標(biāo)系中的位姿矩陣,如公式1-6所示。
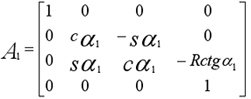 (1)
(1)
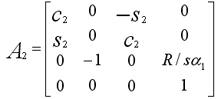 (2)
(2)
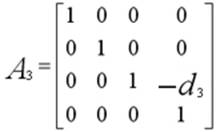 (3)
(3)
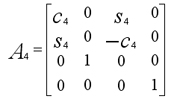 (4)
(4)
 (5)
(5)
機(jī)器人末桿在及坐標(biāo)系中的位姿矩陣為
 (6)
(6)
其中

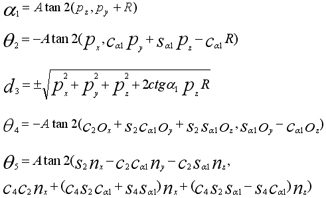
運(yùn)動學(xué)方程逆解
根據(jù)正解結(jié)果,反求出機(jī)器人的各關(guān)節(jié)值。
工作空間分析
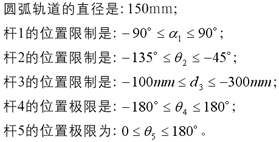
通過工作空間分析,按照實(shí)際的手術(shù)空間要求,得出機(jī)構(gòu)的參數(shù)。
結(jié)合運(yùn)動學(xué)分析及實(shí)際情況,設(shè)置機(jī)器人各桿的尺寸及極限位置如下:
結(jié)論
本文在分析“扭轉(zhuǎn)打結(jié)法”打結(jié)過程的基礎(chǔ)上,設(shè)計(jì)了一種新型的微創(chuàng)縫合打結(jié)機(jī)器人,并詳細(xì)闡述了機(jī)器人的運(yùn)動學(xué)解算過程,結(jié)合實(shí)際給出了設(shè)置機(jī)器人各桿的尺寸及極限位置的參數(shù)。
作者簡介
尚鳳玲 河南工業(yè)大學(xué)在讀研究生。
參考文獻(xiàn)
[1] howe d,yoky matsuoka.robotics for surgery[m].london:biomed, 1999.
[2] 王田苗等. 醫(yī)療外科機(jī)器人的研究開發(fā)與產(chǎn)業(yè)化前景[j].機(jī)器人, 2000, 22(7):897~901.
[3] mayer, hermann; gomez, faustino; wierstra, daan.a system for robotic heart surgery that learns to tie knots using recurrent neural networks[j]. advanced robotics,, 2008, 22:1521-1537(17).
[4] t.asao, s.yamaguchi, s.tsutsumi.experimental results and early clinical experience with an easy method for intracorporeal knot tying using a novel laparoscopic needleholder[j].surgical endoscopy, 2007,21:1553-1556.
[5] 岳龍旺.外殼手術(shù)機(jī)器人縫合打結(jié)研究[d].天津:天津大學(xué),2006.
