
一、概述
“西門子數(shù)控機床電氣控制與維修實訓(xùn)臺”教學(xué)儀器是根據(jù)教育部“振興21世紀(jì)職業(yè)教育課程改革和教材建設(shè)規(guī)劃”的要求,按照職業(yè)教育的教學(xué)和實訓(xùn)要求研發(fā)的產(chǎn)品,它適合各職業(yè)院校技術(shù)與應(yīng)用、電氣技術(shù)、數(shù)控、數(shù)控機床與維修等專業(yè)的教學(xué)與技能實訓(xùn),也適合職業(yè)培訓(xùn)學(xué)校、職教中心、鑒定站、機電類課程的技能鑒定考核。具有數(shù)控車床、車削中心、數(shù)控銑床、加工中心等數(shù)控機床安裝調(diào)試、參數(shù)設(shè)置、故障診斷與維修、數(shù)控編程操作等功能。
二、工藝簡介
“西門子數(shù)控機床電氣控制與維修實訓(xùn)臺”教學(xué)儀器由控制屏和實訓(xùn)桌組成。控制屏采用西門子數(shù)控系統(tǒng),供電由鑰匙開關(guān)和啟停開關(guān)控制。實訓(xùn)桌主要包括伺服驅(qū)動模塊、故障設(shè)置和排故操作單元。伺服驅(qū)動模塊的伺服電機軸上安裝有刻度轉(zhuǎn)盤,便于觀察電機運動,通過西門子系統(tǒng)控制實現(xiàn)對X、Y、Z三軸的進(jìn)給控制。教師可以利用故障設(shè)置和排故操作單元,通過開關(guān)設(shè)置故障,學(xué)生通過對故障的分析判斷,在排故操作單元上排故,同時可以記錄排故次數(shù),具有數(shù)控機床的故障維修考核功能。
三、設(shè)備組成
“西門子數(shù)控機床電氣控制與維修實訓(xùn)臺”教學(xué)儀器由控制屏和實訓(xùn)桌組成。控制屏為鐵制雙層亞光密紋噴塑結(jié)構(gòu),實訓(xùn)桌桌面為防水、防火、耐磨高密度板。單相220V交流電源供電,電壓表監(jiān)測實時電網(wǎng)電壓,電流表監(jiān)測設(shè)備實時工作電流,并設(shè)有指示燈指示和保險絲保護。控制屏采用西門子數(shù)控系統(tǒng),供電由鑰匙開關(guān)和啟停開關(guān)控制。實訓(xùn)桌主要包括伺服驅(qū)動模塊、故障設(shè)置和排故操作單元。伺服驅(qū)動模塊的伺服電機軸上安裝有刻度轉(zhuǎn)盤,便于觀察電機運動。
四、控制線(CN2)接線圖與伺服參數(shù)設(shè)置
1)控制線(CN2)接線圖}
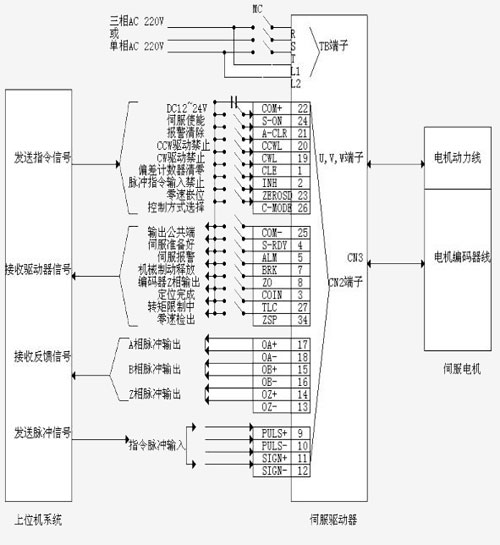
2)參數(shù)設(shè)置說明:
P4=1 (控制方式選擇,1:速度控制);
P9=2 (電機型號選擇);
P26=1 (脈沖輸出邏輯取反);
P44=1(速度指令輸入邏輯取反,可用于改變電機方向);
P43=300(速度指令輸入增益);
P14=1200(速度環(huán)比例);
P15=500 (速度環(huán)積分);
P38=2000(電流環(huán)比例);
五、 調(diào)試與注意事項
1)、調(diào)試步驟:
A、正確接好電機動力線(U、V、W、PE),編碼器線(CN3),電源線(L1、L2、R、S、T),根據(jù)要求接好上位機控制線(CN2);
B、低速空載運行一下電機,看電機方向和上位機接收的AB信號是否正確(可通過調(diào)節(jié)PA26、PA44參數(shù)來改變);
C、根據(jù)要求設(shè)置好伺服驅(qū)動器的速度指令輸入增益(PA43);
D、完成上述步驟后,再運行一下電機,看電機聲音是否正常,電機剛性是否滿足以及響應(yīng)時間;(可通過調(diào)節(jié):速度環(huán)參數(shù)PA14、PA15;電流環(huán)參數(shù)PA38、PA41)。
E、調(diào)節(jié)后運行電機,看運轉(zhuǎn)和啟停是否平穩(wěn),若不是是很理想時可重復(fù)D步驟,直到運行性能滿意為止。
2)、注意事項:
A、接動力線(U、V、W)時,一定要一一對應(yīng)接到U、V、W端子上。不能通過改變U、V、W相序來改變電機方向,可通過調(diào)節(jié)參數(shù)來該變電機方向。
B、接控制線(CN2)時,上位機系統(tǒng)和伺服一定要有一端接屏蔽線,避免外界對控制信號的干擾。
C、布線一定要合理,交直流電源要嚴(yán)格分開,控制線要與電機動力線、電源線嚴(yán)格分開。
3)、結(jié)果:經(jīng)過客戶的試用,運行平穩(wěn)正常,無抖動、啟停平穩(wěn),各項指標(biāo)都達(dá)到要求。
六、 故障與排除方法
1)故障:上位機一給信號電機就跑飛了,驅(qū)動器出現(xiàn)09號報警;
排除方法:檢查電機動力線(U、V、W)相序是否接錯,查看驅(qū)動器PA9(電機型號選擇)是否設(shè)置正確)。
2)故障:出現(xiàn)27號報警
排除方法:查看電機編碼器線(CN3)是否松了,固定好后再試。
七、 總結(jié)
此教學(xué)儀器實訓(xùn)臺充分結(jié)合了東能伺服EPS2系列的響應(yīng)快、定位精確、運行平穩(wěn)等優(yōu)點。經(jīng)過客戶的試用,運行平穩(wěn)正常,無抖動、啟停平穩(wěn),各項指標(biāo)都達(dá)到要求,使客戶達(dá)到最大滿意度。此設(shè)備向客戶充分展示了東能伺服的優(yōu)勢,同時也提高了教學(xué)儀器實訓(xùn)臺在市場上的競爭力。學(xué)生能夠通過此教學(xué)儀器,對故障的分析判斷,在排故操作單元上排故,對數(shù)控車床、車削中心、數(shù)控銑床、加工中心等模擬實訓(xùn)平臺的數(shù)控程序和伺服參數(shù)設(shè)置、故障診斷與維修、數(shù)控編程等操作不斷提高學(xué)生自身的實戰(zhàn)能力。