摘 要: 針對某裝備中三相交流異步電機調(diào)速的要求, 以TMS320LF2407A 和AT89S52 為核心采用磁場定向控制策略設(shè)計了一電流、轉(zhuǎn)速雙閉環(huán)調(diào)速控制系統(tǒng), 給出了硬件原理框圖、關(guān)鍵器件、設(shè)計思想和程序流程圖。實驗結(jié)果表明, 該控制系統(tǒng)具有動態(tài)響應(yīng)快, 控制精度高, 實時顯示, 數(shù)據(jù)存儲, 抗干擾強等優(yōu)點。
0 引 言
三相交流異步電機以其結(jié)構(gòu)簡單, 體積小, 重量輕,價格低, 維修方便等優(yōu)點, 廣泛應(yīng)用于武器裝備、給料系統(tǒng)、數(shù)控機床、柔性制造技術(shù)、各種自動化設(shè)備等領(lǐng)域,其轉(zhuǎn)速控制系統(tǒng)性能的優(yōu)劣直接決定了設(shè)備性能的發(fā)揮。隨著高性能微處理器及新型電力電子器件的出現(xiàn),使得應(yīng)用全控型電力電子器件和空間矢量( SVPWM)控制技術(shù)進行變頻調(diào)速的方式已成為交流電機調(diào)速控制的主流。
相對于其他微處理器, DSP 具有運算速度快, 可以自己產(chǎn)生有死區(qū)時間的PWM 輸出, 可以實現(xiàn)諸如模糊控制等復(fù)雜的算法, 外圍硬件少等優(yōu)點, 因而廣泛用于電機的數(shù)字控制。本文以TMS320LF2407A DSP 芯片和AT89S52 單片機為核心, 設(shè)計了針對三相交流異步電機的全數(shù)字調(diào)速控制系統(tǒng)。實驗結(jié)果表明, 該系統(tǒng)具有實時顯示, 數(shù)據(jù)存儲, 動態(tài)響應(yīng)快, 控制精度高, 抗干擾性強等優(yōu)點。
1 TMS320LF2407A簡介
TMS320LF2407A 主要包括算術(shù)邏輯運算單元( CALU) 、寄存器集、輔助算術(shù)邏輯單元( ARAU) 、乘法器、乘法移位器、累加器、加法移位器、時鐘鎖相環(huán)電路、兩個完全等同的事件管理器A, B( 包括通用定時器、比較單元、捕獲/ 正交編碼器脈沖電路) 、內(nèi)部A/ D 轉(zhuǎn)換器、雙串口、看門狗、CAN 總線電路單元等。
TMS320LF2407A 采用先進的哈佛結(jié)構(gòu), 流水線作業(yè), 在30 MHz 內(nèi)部時鐘頻率下, 指令周期僅為33 ns。
其內(nèi)部存儲器包含2 類RAM 塊。一類為DRAM, 另一類為SRAM。對DRAM 而言又劃分為3 個RAM塊, 即B0, B1, B2, 容量依次為256 字, 256 字, 32 字。這些RAM 全部允許在一個指令周期內(nèi)訪問兩次, 因此在數(shù)據(jù)處理能力上有顯著的增加。同時, B0 塊還可以通過程序動態(tài)地配置為數(shù)據(jù)存儲器區(qū)或程序存儲器區(qū)。
若配置為程序區(qū)可在上電時把浮點算法子程序或者數(shù)據(jù)表從外部慢速EPROM 裝入此區(qū)域, 從而緩解高速處理器與慢速外設(shè)之間的矛盾, 這對提高控制系統(tǒng)的動態(tài)性能有很大幫助。TMS320LF2407A 內(nèi)部含有內(nèi)嵌采樣保持的10 位精度、高速A/ D 轉(zhuǎn)換器, 轉(zhuǎn)換時間最短為500 ns ( 采樣保持+ 轉(zhuǎn)換時間) 。除此之外TMS320LF2407A 還有豐富的、功能強大的中斷系統(tǒng)以及常用的I/ O 接口, 這些都使設(shè)計調(diào)速控制系統(tǒng)時的硬件電路得到簡化。
2 系統(tǒng)硬件設(shè)計
基于T MS320LF2407A 三相交流異步電機雙閉環(huán)調(diào)速控制系統(tǒng)硬件框圖如圖1 所示。
系統(tǒng)硬件框圖
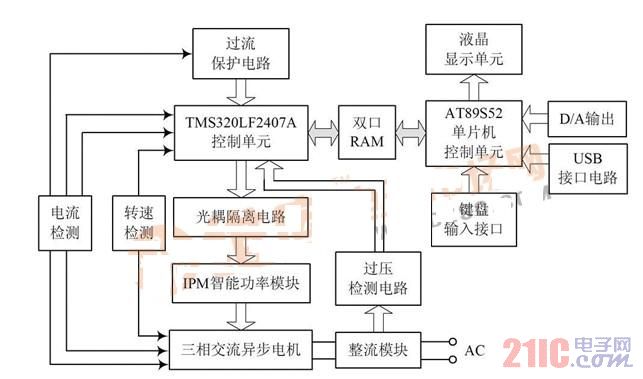
圖1 系統(tǒng)硬件框圖。
系統(tǒng)主電路采用交直交電壓型變頻器, 功率器件采用智能功率模塊IPM。該模塊包含了6 個IGBT 和6 個與IGBT 反并聯(lián)的續(xù)流二極管。控制電路部分由AT 89S52 單片機控制單元、TMS320LF2407A 控制器單元、電流檢測電路、電壓檢測電路、轉(zhuǎn)速檢測電路、過流保護電路、液晶顯示電路和鍵盤輸入接口電路等模塊組成。
2. 1 AT89S52 單片機控制單元:
AT89S52 控制單元主要完成以下功能:
一是通過鍵盤輸入接口完成對給定轉(zhuǎn)速的設(shè)定; 二是通過液晶顯示單元完成對給定轉(zhuǎn)速、電機啟動時轉(zhuǎn)速和達到穩(wěn)態(tài)時轉(zhuǎn)速的顯示;三是完成對雙口RAM 中存儲數(shù)據(jù)的讀取,并將讀取的數(shù)據(jù)通過USB 接口電路導(dǎo)入上位機或通過D/ A 輸出電路輸入到模擬設(shè)備。
其中, 液晶顯示單元采用中文圖形兩用型液晶顯示模塊OCMJ4X8B2; 鍵盤輸入采用矩陣式按鍵鍵盤可以通過單片機調(diào)用預(yù)設(shè)的漢字, 可以輸入數(shù)字( 用來設(shè)置轉(zhuǎn)速) ; 雙口模塊用來存儲TMS320LF2407A 采集的變量波形數(shù)據(jù)。
2. 2 TMS320LF2407A 控制單元
TMS320LF2407A 控制單元的電路原理圖如圖2所示。該控制單元電路主要包括光耦隔離電路、轉(zhuǎn)速檢測電路、電流檢測電路和電壓檢測電路, 分別完成對IPM 的驅(qū)動、轉(zhuǎn)速檢測與控制、過流保護、過壓和欠壓保護等功能。
TMS320LF2407A 控制單元電路原理圖
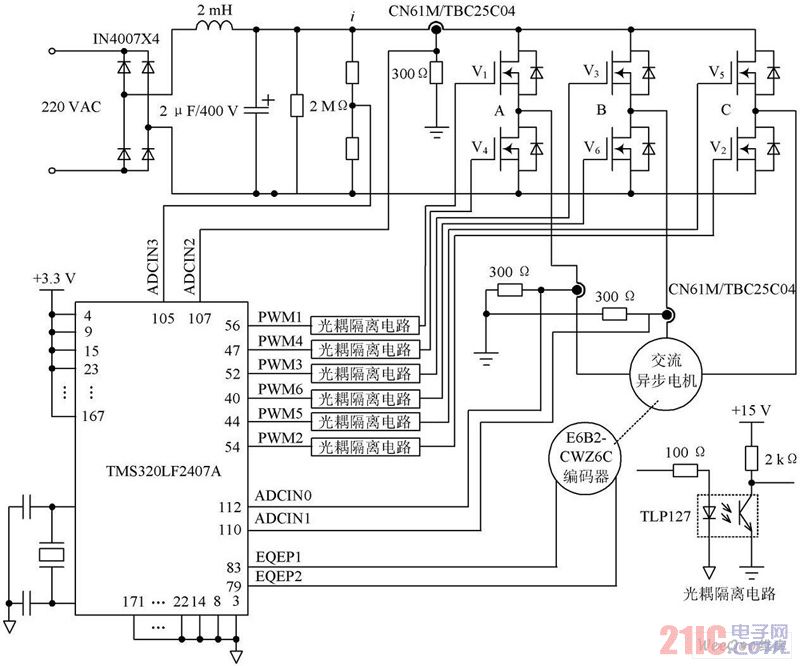
圖2 TMS320LF2407A 控制單元電路原理圖。
光耦隔離電路由6 片東芝公司的TLP127 及相應(yīng)的限流電阻組成, 主要完成TMS320LF2407A 與IPM 智能功率模塊的電氣隔離, 并將輸出的PWM 信號放大。
轉(zhuǎn)速檢測電路采用歐姆龍1024 原旋轉(zhuǎn)型線編碼器E6B2CWZ6C, 編碼器輸出的脈沖經(jīng)過TMS320LF2407A內(nèi)部4 倍頻后可以實現(xiàn)每轉(zhuǎn)4 096 個脈沖, 從而保證了轉(zhuǎn)速的精度。根據(jù)采樣得到的數(shù)據(jù)與給定數(shù)據(jù)比較, 調(diào)整DSP 輸出驅(qū)動脈沖的寬度, 從而調(diào)節(jié)交流電機的轉(zhuǎn)速。
電流采樣電路采用3 片霍爾電流傳感器CN61M/TBC25C04, 一路將檢測到的直流母線上瞬時電流值送入過流保護電路, 當其值大于過電流值時, 相應(yīng)過流保護電路動作產(chǎn)生保護信號, 關(guān)斷PWM 信號的輸出; 另外兩路檢測流過電動機的電流, 通過變換改變DSP 輸出的驅(qū)動脈沖, 進而保持電機的轉(zhuǎn)速不變。在本文設(shè)計的控制系統(tǒng)中, TMS320LF2407A 采用了ADCIN00,ADCIN01和ADCIN02 三路通道, 以采集電機A 相、B 相和直流母線的電流,直流母線的采樣電壓通過ADCIN03 通道輸入DSP, 根據(jù)采樣得到的數(shù)據(jù), 在電壓超過設(shè)定的上、下限值時, DSP 關(guān)斷PWM 脈沖的輸出, 從而實現(xiàn)過壓和欠壓保護功能。
3 系統(tǒng)軟件設(shè)計
3. 1 閉環(huán)調(diào)速控制的原理
本文設(shè)計的雙閉環(huán)調(diào)速控制系統(tǒng)的原理框圖如圖3所示。
其中, 給定速度由鍵盤輸入接口電路輸入AT 89S52單片機控制系統(tǒng), 速度PI 調(diào)節(jié)、電流PI 調(diào)節(jié)、磁場位置角和轉(zhuǎn)速反饋量的計算由TMS320LF2407A 計算實現(xiàn)。
測得的電機轉(zhuǎn)速通過AT 89S52 控制系統(tǒng)輸出到液晶顯示單元上實時顯示。
雙閉環(huán)調(diào)速控制系統(tǒng)框圖
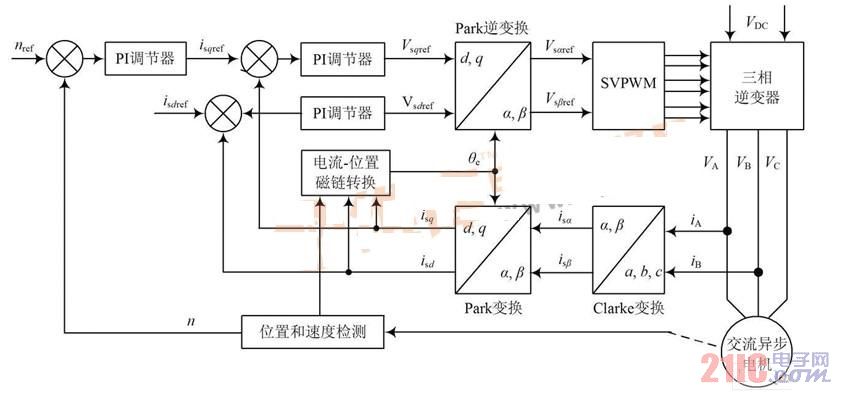
圖3 雙閉環(huán)調(diào)速控制系統(tǒng)框圖。
假設(shè)電機定轉(zhuǎn)子三相繞組完全對稱; 定轉(zhuǎn)子表面光滑, 無齒槽效應(yīng), 定轉(zhuǎn)子每相氣隙磁動勢在空間呈正弦分布; 磁飽和、渦流及鐵心損耗均忽略不計, 則三相交流異步電動機的轉(zhuǎn)矩方程如下:

式中: L r , L m 分別為轉(zhuǎn)子自感和互感; p 是微分算子; i sq是定子電流在q 軸上的分量; rd 是轉(zhuǎn)子磁鏈在d 軸上的分量。
從式( 1) 可以看出, 異步電機的轉(zhuǎn)矩與定子電流矢量和轉(zhuǎn)子磁場以及夾角有關(guān)。因此, 要想控制轉(zhuǎn)矩, 必須先檢測和控制磁通。當dq 坐標系在同步旋轉(zhuǎn)磁場上且靜止坐標系中的各交流量轉(zhuǎn)化為旋轉(zhuǎn)坐標系中對應(yīng)的直流量時, 使d 軸和轉(zhuǎn)子磁場方向重合, 可得到磁場定向控制方程如下:
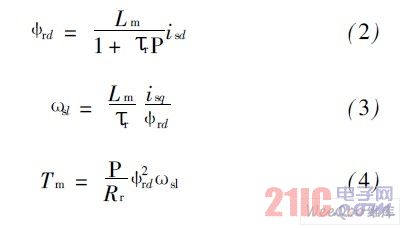
式中: 為漏磁系數(shù); r 為轉(zhuǎn)子時間常數(shù)。
為漏磁系數(shù); r 為轉(zhuǎn)子時間常數(shù)。
由式( 2) 可知, 檢測到定子電流的d 軸分量( 勵磁分量) 可觀測出轉(zhuǎn)子磁通幅值; 由式( 4) 可知, 當rd 恒定時, 只要控制定子電流的q 軸分量( 轉(zhuǎn)矩分量) , 即可控制電磁轉(zhuǎn)矩。具體工作原理如下:
通過電流傳感器測量逆變器輸出的定子電流iA ,iB , 經(jīng)過DSP 的A/ D 轉(zhuǎn)換器轉(zhuǎn)換成數(shù)字量, 并利用iC = - ( i A + i B ) 計算出i C。電流i A , iB , i C 通過Clarke 變換和Park 變換得到了dq 坐標系下的勵磁反饋電流i sd和轉(zhuǎn)矩反饋電流isq , 與給定的勵磁電流i sd ref 和轉(zhuǎn)矩電流i sqref 的差通過PI 調(diào)節(jié)后, 再經(jīng)過Park 逆變換輸出!?
坐標下的電壓, DSP 利用該電壓生成三相逆變器所需的六路驅(qū)動信號。實時測量的電機轉(zhuǎn)速信號一方面用于與給定速度比較產(chǎn)生i sqref , 另一方面進入電流位置磁鏈轉(zhuǎn)換模型求出磁鏈的位置, 并用于Clar ke 和Park 逆變換。
3. 2 程序流程圖
AT89S52 單片機控制系統(tǒng)上電后,首先通過鍵盤輸入接口輸入給定轉(zhuǎn)速, 單片機將給定轉(zhuǎn)速存儲在雙口RAM 中, 同時, 給定轉(zhuǎn)速通過單片機P0 口輸出到液晶顯示單元的驅(qū)動控制芯片SED1520,由SED1520 驅(qū)動OCMJ4X8B2 顯示轉(zhuǎn)速, 轉(zhuǎn)速的顯示范圍為0~ 9 999 r/ min, 然后通過鍵盤來確定是否要對相關(guān)變量采樣并存儲。該部分程序流程圖如圖4( a) 所示。
其次給TMS320LF2407A DSP 控制系統(tǒng)上電, 運行初始化程序完成初始狀態(tài)的設(shè)定( 包括對相關(guān)變量采樣數(shù)據(jù)存儲等) , DSP 控制系統(tǒng)對電機轉(zhuǎn)速和電樞電流采樣, 與給定值進行比較, 若達到設(shè)定轉(zhuǎn)速, 則循環(huán)運行, 當給定轉(zhuǎn)速改變時, 進入中斷處理子程序。主程序流程圖和中斷處理子程序流程圖分別如圖4( b) 和圖4 ( c)所示。
程序流程圖
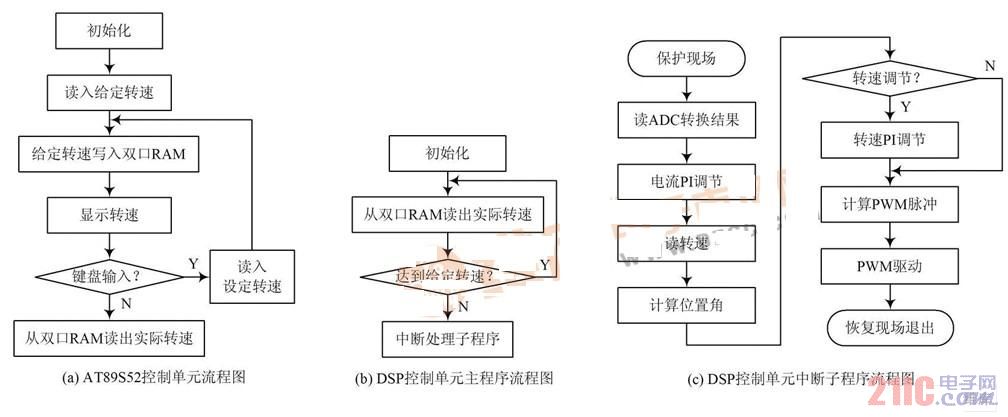
圖4 程序流程圖。
4 實驗結(jié)果
對電機的轉(zhuǎn)速、定子電流、磁通等變量進行采樣、保存, 并通過USB 接口電路轉(zhuǎn)移到上位機; 在上位機上得到的實驗波形如圖5 所示, 波形的數(shù)據(jù)采樣點為2 048。
從圖5( a) 上可以看出, 電機在很短的時間內(nèi)達到設(shè)定的轉(zhuǎn)速值1 000 r/ min。在啟動過程中, 定子電流由于PWM 控制, 產(chǎn)生一定的波動, 當轉(zhuǎn)速達到設(shè)定值后, 定子電流也很快趨于穩(wěn)定, 動態(tài)響應(yīng)很快; 從圖5( b) 上可以看出, 當轉(zhuǎn)速發(fā)生變化時, 定子電流的q 軸分量( 轉(zhuǎn)矩分量) 基本沒有變化, 電機的電磁轉(zhuǎn)矩也不會發(fā)生變化; 從圖5( c) 和( d) 可以看出, 當電機轉(zhuǎn)速發(fā)生變化時, 電機的磁場變化幅度可以忽略, 從而電機的轉(zhuǎn)速也不會發(fā)生變化, 即設(shè)計的控制系統(tǒng)對轉(zhuǎn)速的控制精度很高, 完全達到了設(shè)計要求。
實驗波形
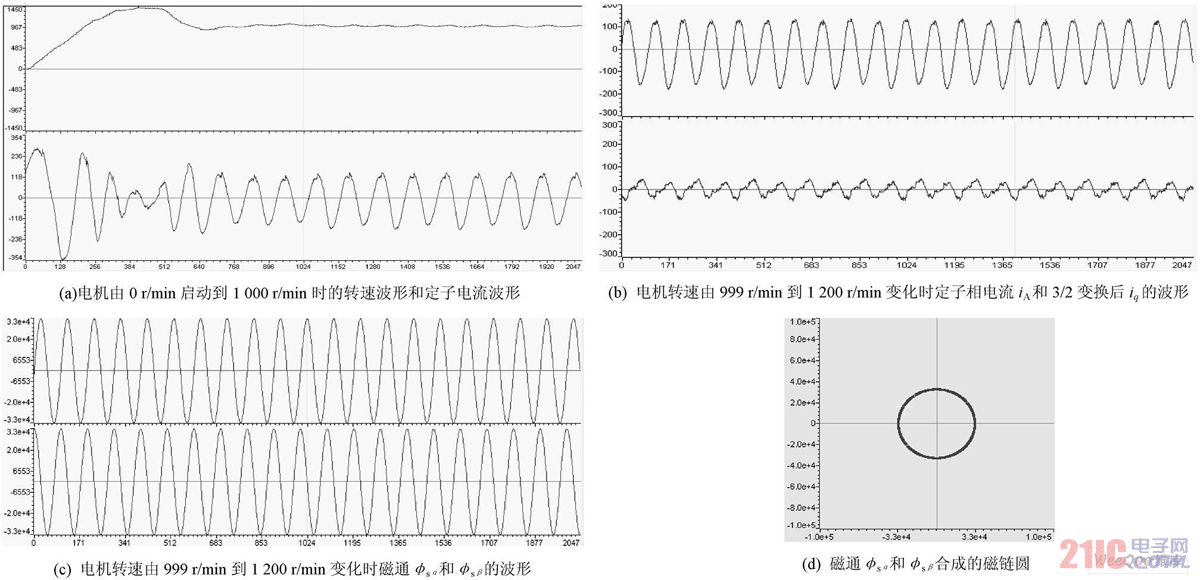
圖5 實驗波形。
5 結(jié) 語
本文采用以T MS320LF2407A 為PWM 控制核心, 以A T89S21 控制單元為電機轉(zhuǎn)速控制管理核心的三相交流異步電機雙閉環(huán)調(diào)速控制系統(tǒng)具有數(shù)據(jù)存儲、實時顯示等功能。實驗結(jié)果表明, 該控制系統(tǒng)具有動態(tài)響應(yīng)快, 控制精度高等優(yōu)點。實踐證明, 該系統(tǒng)還具有較好的抗干擾性。該系統(tǒng)對電機調(diào)速系統(tǒng)的設(shè)計和實現(xiàn)也具有較高的指導(dǎo)意義。
