1 前言
可編程控制器(PC)包括可編程邏輯控制器(PLC)和可編程計(jì)算機(jī)控制器(PCC),。無論是PLC還是它的升級產(chǎn)品PCC,其基本組成和工作原理部是相同的,。但是,,PCC具有一般PLC所不具備的特點(diǎn):① PCC已經(jīng)采用了多任務(wù)操作系統(tǒng);② PCC不但支持梯形圖和C語言等各種高低編程語言,,還具有專為工業(yè)控制開發(fā)的高級語言,,它比通用的高級語言,如C 語言更適用于工業(yè)控制,,更易于編程,;③ PCC可以支持多個(gè)主CPU同時(shí)工作,而且還具有智能處理器,,如專門的時(shí)間處理單元守(TPU),。綜上所述可看出,PCC在很多方面突破傳統(tǒng),,在PLC中引入了新的思想和編程思想,,更易于實(shí)現(xiàn)日趨復(fù)雜的控制要求[1]。步進(jìn)電機(jī)在工業(yè)領(lǐng)域應(yīng)用非常廣泛,,實(shí)現(xiàn)PCC控制的步進(jìn)電機(jī)具有很大的實(shí)用價(jià)值,。
2 步進(jìn)電機(jī)的控制
步進(jìn)電機(jī)的性能對控制系統(tǒng)的設(shè)計(jì)具有重要的意義,在設(shè)計(jì)時(shí)需要綜合考慮步進(jìn)電機(jī)的步距角,、細(xì)分?jǐn)?shù),、保持力矩等,使調(diào)速系統(tǒng)具有高的可靠性,。
在步進(jìn)式PCC調(diào)速器中,,根據(jù)步進(jìn)電機(jī)的控制脈沖生成方式,,它的控制方式分為直接控制和間接控制兩種方式。前者,,由PCC完成脈沖生成和脈沖分配,,并輸出與步進(jìn)電機(jī)相適應(yīng)的脈沖,再經(jīng)過功率放人驅(qū)動步進(jìn)電機(jī),;后者,,由PCC完成脈沖生成并輸出步進(jìn)脈沖和方向控制信號,再由硬件或其他裝置(如步進(jìn)電機(jī)驅(qū)動器)實(shí)現(xiàn)脈沖分配和功率放大,。采用直接控制方式時(shí),,步進(jìn)電機(jī)運(yùn)動頻率由高速任務(wù)組的掃描周期決定,步進(jìn)電機(jī)的運(yùn)動頻率愈高,,則要求高速任務(wù)組的掃描周期愈短,,這樣,占用CPU的時(shí)間就愈長,;采用間接控制方式時(shí),,其功能由TPU完成,不占用CPU 資源,;脈沖分配由步進(jìn)電機(jī)驅(qū)動器完成,,且具有更完善和靈活的控制功能(如升降速等)。因此在步進(jìn)式PCC調(diào)速器中主要采用間接控制力式,。
圖1 示出以兩相混合式步進(jìn)電機(jī)為例,采用間接控制方式的控制結(jié)構(gòu),。在PCC間接控制方式下,,方向控制信號根據(jù)控制量增量值的正負(fù)確定,輸出脈沖信號經(jīng)過步進(jìn)電機(jī)驅(qū)動器完成脈沖的分配,,使步進(jìn)電機(jī)按照所要求的力向和位移量或角度轉(zhuǎn)動,。
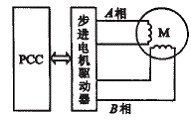
圖1 兩相步進(jìn)電機(jī)PCC控制電路
步進(jìn)電機(jī)選用美國Palker 公司的OEM83 一135 , 驅(qū)動器選用Palker 公司的OEM750 , PCC模塊選用奧地利B&R公司的POWER PANEL.PP41 ,數(shù)字量輸出模塊選用可與TPU 通道相連接的高速輸出模塊DOl35 ,。PCC通過數(shù)字量輸出模塊輸出步進(jìn)脈沖信號和方向控制信號,,送入OEM750 步進(jìn)電機(jī)驅(qū)動器的相應(yīng)端口, 由OEM750 步進(jìn)電機(jī)驅(qū)動器產(chǎn)生與步進(jìn)電機(jī)相適應(yīng)的驅(qū)動脈沖驅(qū)動步進(jìn)電機(jī),。在PCC 內(nèi)部控制步進(jìn)電機(jī)的脈沖信號通過調(diào)用TPU功能塊LTXPestXO 產(chǎn)生,,該模塊專門為步進(jìn)電機(jī)設(shè)計(jì),具有與步進(jìn)電機(jī)驅(qū)動器相適應(yīng)的兩個(gè)輸出信號,,即步進(jìn)脈沖信號和方向電平信號,。PCC 輸出的步進(jìn)脈沖信號用于控制步進(jìn)電機(jī)的位置和速度。也就是說,,驅(qū)動器每接受一個(gè)脈沖就驅(qū)動步進(jìn)電機(jī)旋轉(zhuǎn)一個(gè)步距角,,改變脈沖頻率,,則同時(shí)使步進(jìn)電機(jī)的轉(zhuǎn)速改變,控制脈沖的個(gè)數(shù),,則可使步進(jìn)電機(jī)精確定位,,以實(shí)現(xiàn)步進(jìn)電機(jī)調(diào)速和定位的目的。PCC輸出方向的控制信號用于控制步進(jìn)電機(jī)的旋轉(zhuǎn)方向,,此端為高電平時(shí),,電機(jī)順時(shí)針旋轉(zhuǎn),反之,,電機(jī)逆時(shí)針旋轉(zhuǎn),。
2 .1 步進(jìn)電機(jī)驅(qū)動器
OEM75驅(qū)動器具有分辨率、靜態(tài)鎖定電流,、最大驅(qū)動電流等參數(shù)設(shè)置以及升降速控制等功能,,并具有使用方便、安個(gè)可靠等許多優(yōu)點(diǎn),。
分辨率(步進(jìn)電機(jī)運(yùn)行一圈的步數(shù))的設(shè)置可多達(dá)16 級,,范圍從每圈200 步至每圈508 ( ) 0 步不等,可滿足用戶的不同要求,。設(shè)置時(shí),,可通過對該驅(qū)動器上的開關(guān)2 的2 到5 位進(jìn)行。在PCC調(diào)速器中選取每圈步數(shù)為1000步,,這樣步進(jìn)電機(jī)的步距角為0.36度 ,,完全滿足了調(diào)速系統(tǒng)的要求,同時(shí)由于驅(qū)動器采用了細(xì)分技術(shù),,因此對步進(jìn)電機(jī)的低頻震顫也起到了很好的阻尼作用,,增強(qiáng)了系統(tǒng)的穩(wěn)定性和可靠性。
步進(jìn)電機(jī)在靜止?fàn)顟B(tài)時(shí)的靜態(tài)鎖定電流有4 種不同的電流等級可供選擇,。由于PCC 調(diào)速器中的鎖定力矩較小,,故選取靜態(tài)鎖定電流為最大驅(qū)動電流的25 % ,以降低步進(jìn)電機(jī)溫升并延長其壽命,。
為使電機(jī)能有最大力矩又不引起電機(jī)的振蕩和噪音,,在PCC調(diào)速器中將最大驅(qū)動電流設(shè)置為7.5A , 供電電壓為24v 。電流環(huán)增益按下式計(jì)算:
Ki= 364 000 LM/U
式中 LM——-電機(jī)電感(H) U——-電源電壓
需注意,,當(dāng)電機(jī)需要改變運(yùn)動方向時(shí),,必須使改變方向的控制電平信號至少保持200us。
2 .2 TPU功能塊LTXPestXO模塊
TPU 是PP41 模塊微處理器所具有的一個(gè)時(shí)間處理單元,,主要用于外部處理事件計(jì)數(shù),、門電平時(shí)間測量、頻率測量,、脈寬調(diào)制等與時(shí)間有關(guān)的任務(wù)(timing tasks ) ,,縮短CPU 模塊為處理這些任務(wù)調(diào)用中斷服務(wù)程序所占用的時(shí)間,。TPU功能模塊包含TPU操作系統(tǒng)、TPU 配置,、完成特定功能的TPU 程序模塊等,,應(yīng)用程序通過它與TPU通訊傳遞參數(shù)和數(shù)據(jù),該功能模塊由B&R公司專門研制的TPU 編碼連接器產(chǎn)生,,并在CPU 熱啟動(warm start)時(shí),,將自己傳入TPU 的RAM 中,由此接管TPU 讓它完成用戶特定的功能,。
在步進(jìn)電機(jī)控制中,,主要利用功能模塊LTXPestXO,它與D0135 模塊配合使用,,占用2 個(gè)TPU 輸出通道,,第一通道為控制步進(jìn)電機(jī)轉(zhuǎn)速的脈沖信號,第二通道為控制步進(jìn)電機(jī)力向的信號,。它能根據(jù)絕對位置或相對位置兩種模式調(diào)節(jié)步進(jìn)電機(jī),。該模塊在循環(huán)任務(wù)中調(diào)用。需注意,,該模塊只能在程序的一個(gè)地方調(diào)用,,否則不同程序部分調(diào)用同一硬件可能引起沖突。
功能模塊LTXPestXO可對包括步進(jìn)電機(jī)起/停時(shí)的最小速度和最大速度,、步進(jìn)電機(jī)升速時(shí)的加速度和減速時(shí)的加速度,、絕對目標(biāo)位置和相
對目標(biāo)位置等眾多參數(shù)進(jìn)行設(shè)置,使得PCC與步進(jìn)電機(jī)配合使用非常靈活且功能強(qiáng)大,,從而實(shí)現(xiàn)對步進(jìn)電機(jī)及驅(qū)動器的良好控制,。
3 應(yīng)用
目前已有多臺步進(jìn)式PCC調(diào)速器已在四川越西鐵馬二級電站、四川飛羅電站等水電站投入運(yùn)行,。經(jīng)對四川越西鐵馬二級電站2 號機(jī)組調(diào)節(jié)系統(tǒng)進(jìn)行全面的靜動態(tài)特性試驗(yàn),,其結(jié)果表明,,性能指標(biāo)已滿足或優(yōu)于國標(biāo)GB/T9652.1一1997的要求,,其中主要特性試驗(yàn)結(jié)果:① 調(diào)速器轉(zhuǎn)速死區(qū)小于0.04 %;② 甩25%額定負(fù)荷,,接力器不動時(shí)間為0.16s,;③ 甩100%額定負(fù)荷時(shí),轉(zhuǎn)速最大上升為額定轉(zhuǎn)速的118% ,,調(diào)節(jié)時(shí)間為19s,;④ 空載時(shí)擾動量取8% ,選若干組參數(shù)進(jìn)行試驗(yàn)比較,,當(dāng)Kp=1.7 , Kz=0.32, KD= 1.7 時(shí)比較理想,,擾動后調(diào)節(jié)時(shí)間較短,,接力器擺動一次,且機(jī)頻超調(diào)小,。
4 結(jié)束語
將PCC控制步進(jìn)電機(jī)用于水輪機(jī)調(diào)節(jié)系統(tǒng),,數(shù)十座電站的運(yùn)行結(jié)果表明,其設(shè)計(jì)合理,,運(yùn)行狀況良好,,將步進(jìn)電機(jī)用于水輪機(jī)調(diào)速器中,有效地解決了以往調(diào)速器存在可靠性低的問題,,簡化了調(diào)速器結(jié)構(gòu)并降低了造價(jià),,完全能滿足水輪機(jī)調(diào)速器動靜態(tài)的要求,具有很高的可靠性,。
參考文獻(xiàn)
[1] 齊蓉.新一代可編程計(jì)算機(jī)控制器技術(shù)[M]. 西安:西北大學(xué)出版社,,2000.
[2] OEM75O Driver User Guide[Z].Parker Hannifin Corporation,1997.
作者簡介:何躍貴(1965)男,云南人,,高級工程師,,研究方向?yàn)殡娏﹄娮蛹夹g(shù)。
