
摘 要: 實(shí)現(xiàn)了一套基于DSP芯片、工作頻率為915MHz、輸出功率可調(diào)的RFID讀寫器" title="讀寫器">讀寫器。介紹了射頻識(shí)別系統(tǒng)" title="射頻識(shí)別系統(tǒng)">射頻識(shí)別系統(tǒng)的功能與組成以及無源" title="無源">無源反射調(diào)制技術(shù)的基本原理。基于模塊化設(shè)計(jì)技術(shù),提出了讀寫器的硬件設(shè)計(jì)方案,以及系統(tǒng)實(shí)現(xiàn)中的關(guān)鍵技術(shù),包括頻率合成電路中采用的數(shù)字鎖相環(huán)技術(shù)和接收通路信號(hào)幅度穩(wěn)定措施。
關(guān)鍵詞: 射頻識(shí)別 時(shí)分雙工 DSP 讀寫器
射頻識(shí)別RFID(Radio Frequency Identification)是一種非接觸的自動(dòng)識(shí)別技術(shù)。RFID技術(shù)興起于20世紀(jì)80年代,由于超大集成電路技術(shù)的發(fā)展,90年代才進(jìn)入實(shí)用化階段。RFID系統(tǒng)采用了無線電與雷達(dá)技術(shù),數(shù)據(jù)交換不是通過電流的觸點(diǎn)接通而是通過電場(chǎng)與磁場(chǎng),即通過無線的方式通信[1]。與其他的識(shí)別方式相比,射頻識(shí)別技術(shù)能對(duì)移動(dòng)的多個(gè)目標(biāo)進(jìn)行識(shí)別,因而應(yīng)用更廣泛。
讀寫器的硬件設(shè)計(jì)是RFID系統(tǒng)設(shè)計(jì)中的關(guān)鍵部分,當(dāng)前國(guó)內(nèi)關(guān)于RFID的研究都集中在頻率為125kHz、134kHz的低頻和13.56MHz的高頻系統(tǒng)。在更高頻段的微波波段,則少有人研究[2~3]。本文基于無源反射調(diào)制技術(shù)和模塊化設(shè)計(jì)原理,設(shè)計(jì)并實(shí)現(xiàn)了一套工作頻率為915MHz、工作距離長(zhǎng)達(dá)10m的RFID讀寫器。
1 射頻識(shí)別系統(tǒng)
一個(gè)典型的RFID系統(tǒng)由讀寫器(Read/Write Device)、應(yīng)答器" title="應(yīng)答器">應(yīng)答器(Transponder)和數(shù)據(jù)管理、處理單元組成,如圖1所示。RFID系統(tǒng)分為有源和無源兩類,有源RFID系統(tǒng)的應(yīng)答器由電池提供能量,無源RFID系統(tǒng)的應(yīng)答器則沒有電池。無源RFID系統(tǒng)讀寫距離比有源RFID系統(tǒng)要近,但由于其應(yīng)答器具有結(jié)構(gòu)簡(jiǎn)單、成本低、壽命長(zhǎng)等優(yōu)點(diǎn),近年來發(fā)展較快。

在無源RFID系統(tǒng)中,應(yīng)答器工作的能量由讀寫器發(fā)出的射頻信號(hào)" title="射頻信號(hào)">射頻信號(hào)提供。應(yīng)答器由電子數(shù)據(jù)處理、存儲(chǔ)設(shè)備(通常是單個(gè)的微小芯片)和天線組成。當(dāng)應(yīng)答器進(jìn)入讀寫器的能量場(chǎng),應(yīng)答器的能量檢測(cè)電路將射頻信號(hào)轉(zhuǎn)化為直流信號(hào),供其工作。同時(shí),芯片內(nèi)部的數(shù)據(jù)解調(diào)部分從接收到的射頻信號(hào)中解調(diào)出數(shù)據(jù)并送到控制邏輯。控制邏輯負(fù)責(zé)分析數(shù)據(jù)并執(zhí)行相應(yīng)操作,包括從EPPROM讀數(shù)據(jù)或?qū)懭霐?shù)據(jù),將數(shù)據(jù)(如應(yīng)答器ID和其他用戶數(shù)據(jù)等)調(diào)制并發(fā)送出去[2]。
2 反射調(diào)制技術(shù)原理
工作頻率為915MHz的RFID系統(tǒng)采用無源反射調(diào)制技術(shù),應(yīng)答器以一定的調(diào)制方式將自身的數(shù)據(jù)調(diào)制到射頻信號(hào)上,并反射回去[1]。圖2是場(chǎng)效應(yīng)管調(diào)制解調(diào)電路,電感L1和L2作為低通濾波器。在ASK解調(diào)過程中,MES場(chǎng)效應(yīng)管利用晶體管溝道的非線性阻抗對(duì)ASK信號(hào)進(jìn)行整流,電阻R1兩端的電壓變化即反映了ASK信號(hào)中的調(diào)制信息[4]。
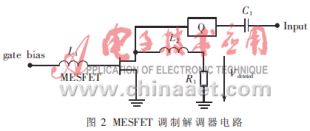
在調(diào)制狀態(tài)下,MES場(chǎng)效應(yīng)管可視為一個(gè)調(diào)制器。調(diào)制器的原理是以金屬半導(dǎo)體場(chǎng)效應(yīng)管輸出阻抗的轉(zhuǎn)換為基礎(chǔ)的。柵極電壓Vgs0=Vd和Vgs0=0可以分別實(shí)現(xiàn)“開啟”和“關(guān)斷”的功能。這兩種情況下,漏極電壓設(shè)置為Vds=0。
圖3是場(chǎng)效應(yīng)管的調(diào)制原理圖。裝置在“關(guān)”和“開”兩種狀態(tài)下的阻抗分別為Z1和Z2。加上轉(zhuǎn)換網(wǎng)絡(luò)Q來得到所需要的反射調(diào)制,在面Pi的反射系數(shù)為?祝1和?祝2;相應(yīng)地,在面Pi′的(輸入點(diǎn))就變?yōu)?祝1′和?祝2′。反射系數(shù)?祝1′和?祝2′滿足下面的等式:

就可以分別實(shí)現(xiàn)ASK調(diào)制和DPSK調(diào)制。
3 讀寫器的硬件結(jié)構(gòu)設(shè)計(jì)
射頻識(shí)別系統(tǒng)中,讀寫器的主要功能就是發(fā)出詢問信號(hào),選擇能量場(chǎng)內(nèi)的應(yīng)答器,建立數(shù)據(jù)通信鏈路并對(duì)應(yīng)答器進(jìn)行讀寫操作[1]。在本設(shè)計(jì)中,UHF頻段的讀寫器主要由天線、射頻模塊和主控模塊三部分組成,如圖1所示。射頻模塊發(fā)送部分產(chǎn)生射頻信號(hào)及射頻能量并給無源應(yīng)答器提供能量;接收部分對(duì)由天線接收的反射調(diào)制信號(hào)進(jìn)行解調(diào)、放大及濾波;主控模塊控制與應(yīng)答器的通信過程;與主機(jī)應(yīng)用軟件進(jìn)行通信,并執(zhí)行應(yīng)用軟件發(fā)來的命令。
本設(shè)計(jì)中的射頻識(shí)別系統(tǒng)采用時(shí)分復(fù)用的工作方式,讀寫器輸出命令信號(hào)與接收應(yīng)答器反射調(diào)制信號(hào)是在不同的時(shí)間段進(jìn)行的。通信鏈路中讀寫器輻射信號(hào)調(diào)制方式是OOK,無源標(biāo)識(shí)卡信息返回時(shí)采用反射調(diào)制技術(shù),也是一種ASK調(diào)制方式。
3.1 數(shù)字鎖相環(huán)技術(shù)
在射頻部分,本系統(tǒng)采用16MHz的晶體振蕩器和926MHz的壓控振蕩器以全數(shù)字鎖相環(huán)(DPLL)的形式產(chǎn)生915MHz射頻信號(hào),如圖4所示。傳統(tǒng)的鎖相環(huán)由模擬電路實(shí)現(xiàn),而全數(shù)字鎖相環(huán)與傳統(tǒng)的模擬電路實(shí)現(xiàn)的PLL相比,具有精度高且不受溫度和電壓影響、環(huán)路帶寬和中心頻率編程可調(diào)、易于構(gòu)建高階鎖相環(huán)等優(yōu)點(diǎn),并且應(yīng)用在數(shù)字系統(tǒng)中時(shí),不需A/D及D/A轉(zhuǎn)換[5]。

VCO頻率fVCO經(jīng)過18比特計(jì)數(shù)器進(jìn)行吞脈沖分頻,參考晶體振蕩器頻率fOSC經(jīng)過15比特計(jì)數(shù)器分頻,二者經(jīng)過鑒相器進(jìn)行相位比較后輸出VCO控制電壓。fOSC與fVCO的關(guān)系如下:

其中,參考頻率分頻系數(shù)R=3~32767,程序分頻范圍B=3~2047,吞脈沖計(jì)數(shù)范圍A=0~127,預(yù)置分頻比P=64。在本系統(tǒng)中,為了兼顧頻率間隔和頻率捕捉帶的要求[6],選取R=1600,A=108,B=1428。使用IFR頻譜儀Spectrum Analyzer 2398對(duì)射頻信號(hào)進(jìn)行測(cè)試,輸出頻率為915.00MHz。
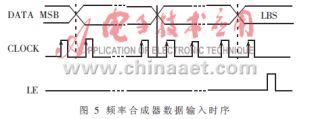
參考頻率和VCO頻率的分頻計(jì)數(shù)器均由主控模塊通過軟件進(jìn)行設(shè)置,圖5是主控模塊與頻率合成器通信的時(shí)序圖。主控模塊向頻率合成器傳輸數(shù)據(jù)時(shí),按照先高位后低位的原則。
在末級(jí)功率放大部分,調(diào)節(jié)其增益控制電壓,即可相應(yīng)調(diào)整讀寫器的輻射功率;為了提高讀寫器輸出功率的穩(wěn)定程度,采用了AGC電路來穩(wěn)定功率放大器的輸出。
3.2 信號(hào)接收
接收部分功能框圖如圖6所示。天線接收的反射調(diào)制信號(hào)經(jīng)過定向耦合器到接收通路,檢波后的信號(hào)通過差動(dòng)放大、低通濾波器、運(yùn)算放大后,進(jìn)行A/D轉(zhuǎn)換送至主控模塊進(jìn)行解碼。

讀寫器進(jìn)行讀寫操作時(shí),讀寫器與應(yīng)答器的距離不是固定不變的。如果讀寫器與應(yīng)答器距離近,讀寫器接收到的反射調(diào)制信號(hào)較強(qiáng);如果讀寫器與應(yīng)答器距離遠(yuǎn),讀寫器接收到的反射調(diào)制信號(hào)就較弱。為了在讀寫器的工作距離內(nèi)得到穩(wěn)定可靠的接收數(shù)據(jù),需要對(duì)A/D轉(zhuǎn)換之前的運(yùn)算放大器進(jìn)行放大倍數(shù)控制,較弱的接收信號(hào)需要較大的放大倍數(shù)。
在本系統(tǒng)中,為了保持接收信號(hào)的穩(wěn)定,采用一種類似移動(dòng)通信系統(tǒng)中移動(dòng)終端功率控制方案:反射信號(hào)變強(qiáng),降低接收通路的放大倍數(shù);反之,反射信號(hào)變?nèi)酰岣咂浞糯蟊稊?shù)。本設(shè)計(jì)采用對(duì)數(shù)放大器對(duì)反射調(diào)制信號(hào)進(jìn)行電平檢測(cè),然后輸入到主控模塊進(jìn)行算法分析,輸出控制信號(hào)改變末級(jí)運(yùn)算放大器的反饋電阻大小,即可實(shí)現(xiàn)運(yùn)算放大器的放大倍數(shù)的自動(dòng)控制,進(jìn)而實(shí)現(xiàn)A/D轉(zhuǎn)換前信號(hào)幅度的穩(wěn)定。當(dāng)然,這需要反復(fù)試驗(yàn),確定一組放大倍數(shù)以及它們與反射信號(hào)強(qiáng)度之間的對(duì)應(yīng)關(guān)系,本文不再詳述。
3.3 主控模塊
主控模塊的核心處理器為一款DSP,該芯片運(yùn)算速度達(dá)50MIPS,片內(nèi)有10K字節(jié)雙向訪問RAM,支持64K字的數(shù)據(jù)空間和64K字的程序空間[7],能夠滿足射頻識(shí)別系統(tǒng)的要求。主控模塊的硬件框圖如圖7所示,本系統(tǒng)采用CPLD完成整個(gè)系統(tǒng)的邏輯電路設(shè)計(jì)。
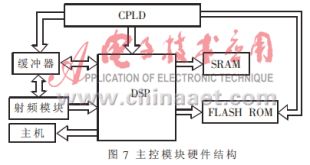
實(shí)際系統(tǒng)中,擴(kuò)展了64K字的SRAM,但因DSP最多支持外部擴(kuò)展64K字的數(shù)據(jù)空間,因此SARM的CE控制信號(hào)由DSP通過CPLD中的邏輯電路來控制,從而決定選擇SARM的高地址段64K字的存儲(chǔ)空間還是低地址字段的存儲(chǔ)空間。這樣,在符合DSP的外擴(kuò)數(shù)據(jù)空間要求的基礎(chǔ)上又增加了寶貴的存儲(chǔ)資源。除了SRAM,還配置了64K字的FLASH ROM以滿足DSP引導(dǎo)裝入程序的需要。
按照本文所述的硬件結(jié)構(gòu)設(shè)計(jì)方法,實(shí)現(xiàn)了一個(gè)供實(shí)驗(yàn)用的工作頻率為915MHz的RFID讀寫器。根據(jù)射頻識(shí)別系統(tǒng)的要求,本系統(tǒng)采用四單元同相微帶天線陣列得到尖銳的方向圖與較高的方向性系數(shù)[8]。在讀寫器最大輸出功率條件下,無源應(yīng)答器的響應(yīng)距離可以達(dá)到10m。該讀寫器結(jié)構(gòu)緊湊,工作性能穩(wěn)定,已應(yīng)用到會(huì)議自動(dòng)簽到系統(tǒng)中,取得了良好的工作效果。
參考文獻(xiàn)
1 [德]Klaus Finkenzeller著, 陳大才編譯. 射頻識(shí)別(RFID)技術(shù)(第二版). 北京:電子工業(yè)出版社, 2001
2沈宇超. 射頻識(shí)別系統(tǒng)中通信協(xié)議的模塊化設(shè)計(jì). 通信學(xué)報(bào),2001;22(2):54~58
3李科讓. 一種實(shí)用的非接觸式IC卡讀寫器系統(tǒng)的設(shè)計(jì). 重慶郵電學(xué)院學(xué)報(bào), 2001;6月(增刊):141~143
4 F.Carrez. Noval low-cost, low-power moduator/demoduator using a single GaAs field effect transistor. IEE Proc Circuits Devices Syst,1998;145(3):165~169
5 Thomas Olsson, Peter Nilsson. Digitally controlled PLL for digital SOCs. Proceedings of the International Symposium on Circuits and Systems,2003;5(3):437~440
6 羅偉雄. 鎖相技術(shù)及其應(yīng)用. 北京:北京理工大學(xué)出版社,1990
7 鐘文政,柯鴻禧. DSP TMS320C50原理與應(yīng)用. 北京:中國(guó)水利水電出版社, 2003
8 賴曉錚,吳澤海,賴聲禮. 一種無源RFID的閱讀器的微帶天線陣的實(shí)驗(yàn)研究.2003年全國(guó)微波毫米波會(huì)議論文集: 713~716