
摘 要: 介紹了研制的用于高密度" title="高密度">高密度母盤" title="母盤">母盤刻錄系統(tǒng)的專用運(yùn)動(dòng)控制卡" title="運(yùn)動(dòng)控制卡">運(yùn)動(dòng)控制卡。該運(yùn)動(dòng)控制卡基于DSP中心處理器和CPLD邏輯處理器模塊而設(shè)計(jì),實(shí)現(xiàn)了母盤刻錄運(yùn)動(dòng)控制的快速性和高精度,能夠很好地滿足母盤刻錄機(jī)運(yùn)動(dòng)控制的需要。
關(guān)鍵詞: DSP CPLD 母盤刻錄 運(yùn)動(dòng)控制卡
隨著電子技術(shù)的發(fā)展,采用計(jì)算機(jī)和運(yùn)動(dòng)控制卡構(gòu)成主從式控制系統(tǒng)" title="控制系統(tǒng)">控制系統(tǒng)并由下位機(jī)——運(yùn)動(dòng)控制卡(Motion Controller)完成主要數(shù)學(xué)運(yùn)算,已經(jīng)成為當(dāng)前先進(jìn)運(yùn)動(dòng)控制技術(shù)的主流[1]。運(yùn)動(dòng)控制卡采用高速數(shù)字信號(hào)處理器為核心處理器。由于DSP具有獨(dú)立的數(shù)據(jù)存儲(chǔ)器和指令存儲(chǔ)器,使得在控制單元內(nèi),數(shù)據(jù)和指令可并行傳輸,大大提高了數(shù)據(jù)的處理速度,可以實(shí)現(xiàn)各種復(fù)雜的控制算法,因而得到了廣泛應(yīng)用。美國(guó)Delta Tau數(shù)字系統(tǒng)公司的PMAC運(yùn)動(dòng)控制卡和香港固高科技的GT-400運(yùn)動(dòng)控制卡分別為國(guó)內(nèi)外商品化運(yùn)動(dòng)控制卡的頂尖之作(PMAC功能強(qiáng)大,適合于復(fù)雜運(yùn)動(dòng)控制)。奧地利B&R工業(yè)自動(dòng)化公司的新一代可編程計(jì)算機(jī)控制器PCC采用多任務(wù)機(jī)制構(gòu)筑其應(yīng)用軟件的運(yùn)行平臺(tái),這樣應(yīng)用程序的運(yùn)行周期與程序長(zhǎng)短無關(guān),而是由操作系統(tǒng)的循環(huán)周期決定。由此它將應(yīng)用程序的掃描周期同外部的控制周期區(qū)別開來,滿足了真正實(shí)時(shí)控制的要求。
高密度母盤刻錄過程中有兩個(gè)主運(yùn)動(dòng)。一個(gè)是母盤的高速回轉(zhuǎn)運(yùn)動(dòng),另一個(gè)是刻錄光學(xué)頭相對(duì)母盤圓心的直線微進(jìn)給運(yùn)動(dòng)。母盤刻錄機(jī)的運(yùn)動(dòng)控制系統(tǒng)的最主要任務(wù)就是通過對(duì)兩個(gè)主運(yùn)動(dòng)的精密控制,使得聚焦光斑以恒定線速度沿著等線距的外展型阿基米德螺旋線軌跡運(yùn)動(dòng)。為實(shí)現(xiàn)高精度恒線速刻錄,這兩個(gè)主運(yùn)動(dòng)都必須不斷調(diào)速,并且保證極高的精度[2]。刻錄機(jī)刻錄時(shí)的道間距很小,只有400nm,刻錄過程中要求變速8.75×104次,而且主軸電機(jī)最高的運(yùn)行速度為1500RPM。在這樣的較高轉(zhuǎn)速的情況下要進(jìn)行如此頻繁的變速,控制的難度很大,傳統(tǒng)的控制方式很難滿足要求。此外,商品化的運(yùn)動(dòng)控制卡由于其具有很強(qiáng)的通用性,也無法完全滿足母盤刻錄系統(tǒng)的需要。為此,需要研制用于高密度母盤刻錄系統(tǒng)的專用運(yùn)動(dòng)控制卡[3]。
1 專用運(yùn)動(dòng)控制卡總體方案
高密度母盤刻錄機(jī)的運(yùn)動(dòng)控制系統(tǒng)采用工控機(jī)和運(yùn)動(dòng)控制卡構(gòu)成的主從式控制系統(tǒng),并由下位機(jī)——運(yùn)動(dòng)控制卡完成主要數(shù)學(xué)運(yùn)算。工控機(jī)負(fù)責(zé)人機(jī)交互界面的管理和控制系統(tǒng)的實(shí)時(shí)監(jiān)控等方面的工作,運(yùn)動(dòng)控制卡完成運(yùn)動(dòng)控制的所有細(xì)節(jié)(包括脈沖和方向信號(hào)的輸出、自動(dòng)升降速的處理、原點(diǎn)和限位等信號(hào)的檢測(cè)等)。母盤刻錄控制系統(tǒng)的總體結(jié)構(gòu)如圖1所示。

基于DSP的中心處理器的設(shè)計(jì)是響應(yīng)速度最快、符合最小化原理、穩(wěn)定性最高的方案,同時(shí)也是最復(fù)雜、最難的方案[4~5]。母盤刻錄機(jī)專用運(yùn)動(dòng)控制卡的結(jié)構(gòu)如圖2所示。 整個(gè)運(yùn)動(dòng)控制卡系統(tǒng)包括:DSP單元、DSP外部存儲(chǔ)器單元、DSP-DA輸出控制單元、ISA總線接口單元、雙口RAM構(gòu)成的ISA消息協(xié)議棧單元、系統(tǒng)譯碼單元和光柵信號(hào)處理單元。
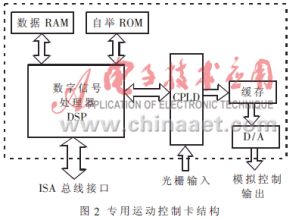
系統(tǒng)的中心由DSP完成控制和伺服功能;自舉ROM存有DSP數(shù)控系統(tǒng)主程序及系統(tǒng)初始化信息;數(shù)據(jù)RAM用于存儲(chǔ)DSP運(yùn)行時(shí)的數(shù)據(jù);CPLD為數(shù)據(jù)交換邏輯接口,負(fù)責(zé)控制信號(hào)的輸出和光柵信號(hào)的輸入與處理(四倍頻、計(jì)數(shù)等)。該數(shù)控系統(tǒng)通過ISA總線接口與工控機(jī)連接,完成控制過程中控制指令與狀態(tài)參數(shù)的傳遞。
2 具體模塊設(shè)計(jì)
下面具體介紹一下專用運(yùn)動(dòng)控制卡的各個(gè)模塊的設(shè)計(jì)。
2.1 核心DSP的設(shè)計(jì)
高密度母盤刻錄機(jī)控制系統(tǒng)的工作是屬于運(yùn)算密集型的任務(wù),因此采用DSP作為中央處理器是非常好的選擇。由于控制系統(tǒng)要求的精度很高,運(yùn)算量非常大,而且運(yùn)算的動(dòng)態(tài)范圍很大,所以定點(diǎn)的DSP無法滿足運(yùn)算的要求,不但速度跟不上,而且還會(huì)產(chǎn)生定標(biāo)不當(dāng)?shù)膯栴},導(dǎo)致運(yùn)算精度丟失,或是出現(xiàn)溢出錯(cuò)誤。另外考慮到系統(tǒng)兼容性問題,最終選擇了TI公司的高精度浮點(diǎn)運(yùn)算處理器TMS320C32作為下位機(jī)的中心處理器。它具有可變寬度的存儲(chǔ)器接口、更快速的指令周期時(shí)間、可設(shè)置優(yōu)先級(jí)的雙通道DMA處理器、靈活的引導(dǎo)程序裝入方式、可重新定位的中斷向量表以及可選的邊緣/電平觸發(fā)中斷方式等。
2.1.1 核心DSP存儲(chǔ)器電路設(shè)計(jì)
TMS320C32不具有片內(nèi)的存儲(chǔ)器,所以存儲(chǔ)器的連接十分重要。C32通過24位的地址總線、32位的數(shù)據(jù)總線和三組選通信號(hào)IOSTRB、STRB0、STRB1訪問外部存儲(chǔ)器。TMS320C32總共提供16M字的存儲(chǔ)空間,每字32bit,這16M字空間包括程序存儲(chǔ)器、數(shù)據(jù)存儲(chǔ)器及I/O空間。
TMS320C32對(duì)外部存儲(chǔ)器的訪問必須經(jīng)過選通信號(hào)引腳,三組選通信號(hào)IOSTRB、STRB0、STRB1分別對(duì)應(yīng)存儲(chǔ)器映像的不同位置。IOSTRB對(duì)應(yīng)的存儲(chǔ)器映像從810000h到82FFFFh,總共128K字,當(dāng)訪問這部分存儲(chǔ)空間時(shí),IOSTRB使能。STRB0對(duì)應(yīng)兩塊不連續(xù)的存儲(chǔ)器映像,分別是從1001h到7FFFFFh(共8.192M字)和從880000h到8FFFFFh(共521K字)。STRB1對(duì)應(yīng)從900000h到FFFFFFh的7.168M字。
2.1.2 核心DSP的BOOT LOADER設(shè)計(jì)
DSP有兩種工作模式:微處理器方式(MP)和微計(jì)算機(jī)方式(MCBL)。微處理器方式(MP)不能自啟動(dòng),必須由主機(jī)引導(dǎo)才能進(jìn)入工作狀態(tài),也就是說必須由主機(jī)裝入工作程序;微計(jì)算機(jī)方式(MCBL)具有自啟動(dòng)和程序自引導(dǎo)功能,這使得TMS320C32的硬件系統(tǒng)設(shè)計(jì)極為方便。
TMS320C32芯片的引腳MCBL/MP用來選擇工作方式,當(dāng)該引腳為低電平時(shí),工作于一般的微處理器方式;當(dāng)該引腳為高電平時(shí),則工作于微計(jì)算機(jī)方式。具體電路設(shè)計(jì)中的工作方式選擇是通過一個(gè)巧妙的瀉放電路來實(shí)現(xiàn)的,避免了使用復(fù)雜的邏輯器件,如圖3所示。
2.1.3 核心DSP的中斷設(shè)計(jì)
當(dāng)TMS320C32工作在MCBL方式時(shí),采用雙矢量方案來響應(yīng)中斷請(qǐng)求,需在相應(yīng)的中斷矢量地址存放跳轉(zhuǎn)指令,而不是直接存放中斷服務(wù)程序的地址。對(duì)于TMS320C32來說,中斷向量表是可以根據(jù)用戶自己的需要重新定位的。其中,中斷-陷阱向量表的表首指針為ITTP(the Interrupt-trap Table Pointer),由中斷標(biāo)志寄存器IF的31~16位組成。該指針左移8位(零位移入)即構(gòu)成中斷-陷阱向量表的表首基地址EA(ITTP),如圖4所示。
2.1.4 核心DSP的Reset設(shè)計(jì)
TMS320C3X的復(fù)位是通過在Reset引腳上置10個(gè)H1周期以上的低電平來實(shí)現(xiàn)的。通常情況下是加入專用的WatchDog復(fù)位電路。但在本系統(tǒng)中,巧妙地設(shè)計(jì)了復(fù)位脈沖發(fā)生器,省去了復(fù)雜的WatchDog電路,如圖5所示。
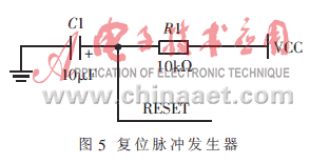
可以算出RESET信號(hào)維持在COMS的低電平VIH=3.5V的時(shí)間約為0.05s>>10TH1(TH1=2.5×10-8s)。這樣的RESET設(shè)計(jì)即可滿足要求。
2.1.5 核心DSP與D/A" title="D/A">D/A轉(zhuǎn)換器的設(shè)計(jì)
由于系統(tǒng)要求的尋址定位的精度很高,作為最后一環(huán)的D/A轉(zhuǎn)換器一定要有高精度和高速的特性,否則前面由DSP計(jì)算出來的高精度、高速的尋址定位指令碼會(huì)在進(jìn)行D/A轉(zhuǎn)換時(shí)丟失精度,甚至?xí)捎谵D(zhuǎn)換速度不夠而丟失指令,成為系統(tǒng)的瓶頸,影響整個(gè)系統(tǒng)的性能。因此選擇了ADI公司的高性能AD669芯片作為D/A轉(zhuǎn)換器。該轉(zhuǎn)換器為16位字長(zhǎng),可以實(shí)現(xiàn)2光軌精度的變速、定位。而且該轉(zhuǎn)換器為雙緩存結(jié)構(gòu),這種特殊的結(jié)構(gòu)可以保證在DSP的控制下,軸、徑向的變速、尋址同時(shí)完成,不會(huì)發(fā)生遲滯。
DSP要同時(shí)控制氣浮主軸和徑向進(jìn)給兩方面的輸出,需采用特殊連接方式,如圖6所示。D/A轉(zhuǎn)換器選通端通過譯碼器(ADDRESS DECODE)與DSP的控制端相連,DSP操縱D/A轉(zhuǎn)換器需要經(jīng)過三條指令。DSP先通過第一條譯碼器將轉(zhuǎn)換數(shù)據(jù)寫入DA1的一級(jí)緩存,再用第二條譯碼器將轉(zhuǎn)換數(shù)據(jù)寫入DA2的一級(jí)緩存。接著DSP輸出第三條指令,譯碼器給出LDAC高電平,啟動(dòng)氣浮主軸和徑向進(jìn)給兩個(gè)方面的D/A轉(zhuǎn)換器同時(shí)將數(shù)據(jù)從一級(jí)緩存打入到二級(jí)緩存,并開始轉(zhuǎn)換;同時(shí)給出模擬控制量,控制外部的放大器和執(zhí)行環(huán)節(jié)工作。

2.2 光柵信號(hào)處理
專用的運(yùn)動(dòng)控制器系統(tǒng)中除了核心的處理單元DSP以及與其相關(guān)的ROM和RAM存儲(chǔ)器之外,最為關(guān)鍵的就是數(shù)字邏輯的通道,主要是光柵信號(hào)處理器。
光柵信號(hào)處理器采用CPLD的MAX7192作為承載器件。MAX7192僅有7ns的固定延遲時(shí)間,可以保證光柵和DSP的高速信號(hào)的匹配。
工作臺(tái)定位檢測(cè)裝置采用Renishaw公司的增量式圓光柵RGR-A和線光柵RLD10。圓光柵RGR-A用于測(cè)量回轉(zhuǎn)工作臺(tái)的轉(zhuǎn)角,線光柵RLD10用于測(cè)量進(jìn)給工作臺(tái)的進(jìn)給距離。測(cè)量光柵的輸出信號(hào)經(jīng)100細(xì)分,成為脈沖當(dāng)量為50nm的RS422標(biāo)準(zhǔn)數(shù)字信號(hào)。
由于光柵的輸出信號(hào)是相差90°相位的數(shù)字信號(hào),如圖7所示,因此可以對(duì)光柵輸出信號(hào)進(jìn)行四倍頻,以提高定位精度,同時(shí)完成判向。可以將光柵的四倍頻電路與判向電路設(shè)計(jì)為一個(gè)整體,利用CPLD實(shí)現(xiàn)光柵接口電路的芯片化設(shè)計(jì),包括光柵信號(hào)倍頻、判向及可逆計(jì)數(shù)器。
當(dāng)正轉(zhuǎn)時(shí),光柵輸出的A相信號(hào)超前B相信號(hào)90°,則在一個(gè)周期內(nèi),AB兩相信號(hào)共有四次相對(duì)變化:00→10→11→01→00;當(dāng)反轉(zhuǎn)時(shí),光柵輸出的A相信號(hào)滯后B相信號(hào)90°,則在一個(gè)周期內(nèi),AB兩相信號(hào)也有四次相對(duì)化:00→01→11→10→00。信號(hào)相對(duì)變化一次,可逆計(jì)數(shù)器就實(shí)現(xiàn)一次加(減)計(jì)數(shù)。從而實(shí)現(xiàn)了正反轉(zhuǎn)情況下的四倍頻計(jì)數(shù)。考慮到誤操作下計(jì)數(shù)器應(yīng)不作計(jì)數(shù),因而得到光柵信號(hào)處理模塊的狀態(tài)轉(zhuǎn)換圖,如圖8所示。
3 專用運(yùn)動(dòng)控制卡實(shí)物圖
將設(shè)計(jì)的專用運(yùn)動(dòng)控制卡用于高密度母盤刻錄機(jī)的控制系統(tǒng)中。通過實(shí)驗(yàn)發(fā)現(xiàn),該控制卡能夠較好地滿足母盤刻錄系統(tǒng)的要求,具有較高的精度。運(yùn)動(dòng)控制卡的實(shí)物圖如圖9所示。
本文設(shè)計(jì)了用于高密度母盤刻錄系統(tǒng)的專用運(yùn)動(dòng)控制卡。該運(yùn)動(dòng)控制卡基于DSP中心處理器和CPLD邏輯處理器模塊,實(shí)現(xiàn)了母盤刻錄運(yùn)動(dòng)控制的快速性和高精度,能夠很好地滿足母盤刻錄機(jī)運(yùn)動(dòng)控制的需要。
參考文獻(xiàn)
1 Gutt H. J., Scholl F. D, Blattner J.High Precision Servo Drives with DSP-based Torque Ripple reduction[J].IEEE Transactions,1996(2):632~637
2 徐端頤.高密度光盤數(shù)據(jù)存儲(chǔ)[M].北京:清華大學(xué)出版社,2003(7):415~425
3 李 晟.高密度母盤刻錄機(jī)控制系統(tǒng)的設(shè)計(jì)與實(shí)驗(yàn):[碩士論文].北京:清華大學(xué),2003.6
4 TMS320C3X User’s Guide .Texas Instruments,2001
5 蘇紹景.基于DSP的寬動(dòng)態(tài)范圍莫爾條紋計(jì)數(shù)與精密細(xì)分技術(shù)[J].光學(xué)精密工程,2001;9(2):146~150