摘 要:根據(jù)輥道窯的特點及常規(guī)PID控制器的局限性,采用基于繼電反饋的整定方法確定PID控制參數(shù),在此基礎(chǔ)上,采用模糊控制理論,根據(jù)系統(tǒng)運行過程中的偏差絕對值及偏差的積累絕對值,對PID參數(shù)進行實時校正,當參數(shù)或工況發(fā)生變化時,逐步調(diào)整PID參數(shù)值,使系統(tǒng)控制性能處于最優(yōu)狀態(tài),實現(xiàn)對PID參數(shù)的在線智能校正,并以RS-485串行通信方式組成分布式智能控制系統(tǒng)對輥道窯溫度進行集中監(jiān)控。該系統(tǒng)已在現(xiàn)場長期連續(xù)運行,性能穩(wěn)定,可靠性高,具有良好的控制性能。
關(guān)鍵詞:分布式控制系統(tǒng);智能控制;PID參數(shù)自整定;輥道窯。
1 引言
陶瓷生產(chǎn)是一門古老、歷史悠久的傳統(tǒng)工業(yè),陶瓷輥道窯的生產(chǎn)過程均采用傳統(tǒng)的手工操作,爐溫波動幅度大,造成瓷磚質(zhì)量不高,甚至出現(xiàn)產(chǎn)品不合格的情況,再加上現(xiàn)場環(huán)境條件差,工人的勞動強度大,操作員工增加,對企業(yè)的經(jīng)濟效益影響較大。為了提高陶瓷生產(chǎn)水平,根據(jù)企業(yè)的實際需求和工廠提出的工藝要求,我們研制了一套分布式智能控制系統(tǒng)對輥道窯爐溫度進行集中監(jiān)控,保證爐溫的誤差在工藝要求之內(nèi),從而提高瓷磚的質(zhì)量與產(chǎn)量,改善工人的勞動條件,提高生產(chǎn)效率。
2 輥道窯溫度分布式控制系統(tǒng)的組成及原理
該系統(tǒng)由上位機與下位機兩大部分組成,上位機與下位機通過RS-485通訊協(xié)議完成信息的傳遞,上位機由586微機加RS232C/RS485轉(zhuǎn)換器構(gòu)成,位于集中控制室,完成向下位機(現(xiàn)場控制器)發(fā)送命令、接收現(xiàn)場控制器數(shù)據(jù)及數(shù)據(jù)分析、存儲、報表打印、顯示等功能。下位機由現(xiàn)場溫度智能控制器、溫度傳感器,電動比例調(diào)節(jié)閥等組成,主要完成對輥道窯爐各點溫度的測量、控制及向上位機發(fā)送有關(guān)數(shù)據(jù)等。6個控制器通過電動比例調(diào)節(jié)閥調(diào)整噴油量達到分別控制窯爐內(nèi)6點溫度,從而保證窯爐燒成帶溫度的恒定,該系統(tǒng)特別適合于象輥道窯這樣的小規(guī)模DCS系統(tǒng)。
3 智能溫度控制器的設(shè)計
3.1 概述
常規(guī)PID控制器由于具有原理簡單,穩(wěn)定性好,易于實現(xiàn)等優(yōu)點,因而在過程控制中得到廣泛應(yīng)用,但在輥道窯溫度控制系統(tǒng)中,常規(guī)PID控制器也暴露出其局限性。首先常規(guī)PID控制器的設(shè)計是基于對象的數(shù)學(xué)模型,而輥道窯爐難以用數(shù)學(xué)表達式描述,故系統(tǒng)達不到預(yù)期的控制品質(zhì)。其次當輥道窯的工況發(fā)生變化時(例如,油壓波動,油的品質(zhì)變化時),在某一工況下整定的PID參數(shù)不能滿足性能指標要求。為此,在PID控制器設(shè)計時,首先采用基于繼電反饋的整定方法,確定PID調(diào)節(jié)器參數(shù),再對PID參數(shù)實行實時Fuzzy校正,使其具有自適應(yīng)功能,從而滿足系統(tǒng)變工況的要求。
3.2 溫控器的控制策略
3.2.1 PID參數(shù)自整定
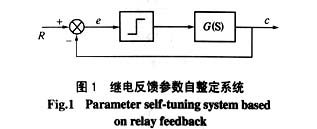
根據(jù)繼電振蕩原理,繼電反饋系統(tǒng)框圖如圖1所示。若繼電器輸出幅度為b,則根據(jù)非線性理論,繼電器的描述函數(shù)為 ,其中誤差信號的幅度為不斷調(diào)整繼電特性的幅值,使系統(tǒng)發(fā)生自振蕩,然后測取振蕩周期與幅度,便可得出臨界增益 與臨界周期 。利用這兩個參數(shù),根據(jù)Ziegler-Nichols方法,可得出PID參數(shù) , , 。PID參數(shù)整定完畢后,此參數(shù)作為PID控制器Fuzzy校正的初值,并自動轉(zhuǎn)入PID參數(shù)Fuzzy校正控制。一般在系統(tǒng)初次投入時整定,并把整定值存入EEPROM中。
其中 Kp為比例系數(shù);Ti為積分時間常數(shù);Td為微分時間常數(shù)。
3.2.2 PID參數(shù)實時Fuzzy校正
根據(jù)上述自整定得出的PID參數(shù),當輥道窯爐參數(shù)或工況發(fā)生變化時,系統(tǒng)的性能將下降,甚至無法滿足工藝要求,所以必須對PID參數(shù)進行在線調(diào)整。目前較多地采用自校正PID算法,但這種方法是基于被控對象精確的數(shù)學(xué)模型,為此,我們采用模糊控制技術(shù),根據(jù)系統(tǒng)運行過程中的偏差絕對值 及偏差的積累絕對值 ,對PID參數(shù)進行實時校正,當參數(shù)或工況發(fā)生變化時,逐步調(diào)整 值,使系統(tǒng)控制性能處于最優(yōu)狀態(tài)。 的修正規(guī)則如下:
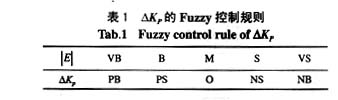
(1)比例系數(shù) 增大,系統(tǒng)響應(yīng)速度加快,穩(wěn)態(tài)誤差減小,因此在偏差大的情況下,要增大 值。但是 過大會使系統(tǒng)產(chǎn)生超調(diào),甚至不穩(wěn)定,因此在偏差小的情況下,要減小 值。將偏差絕對值 的模糊子集取為很大(VB)、大(B)、中(M)、小(S)和很小(VS), 的模糊子集取為PB、PS、O、NS、NB,則 的修正量 的Fuzzy控制規(guī)則如表1所示。其中, 的基本論域為[0,10],分為11個量化等級,即 ={0,1,2,3,4,5,6,7,8,9,10}, 的基本論域為[-0.5,+0.5],分為11個等級即 ={-0.5,-0.4,-0.3,-0.2,-0.1,0,0.1,0.2,0.3,0.4,0.5}。
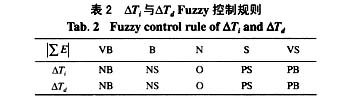
(2)在PID控制器中,積分作用是為了消除穩(wěn)態(tài)誤差,加強積分作用(減小 )有利于減小穩(wěn)態(tài)誤差,但過強的積分作用會引起積分飽和,使系統(tǒng)超調(diào)加大,甚至引起振蕩。因此,在調(diào)節(jié)過程中的初期,即誤差的積累 較小時,應(yīng)減弱積分的作用(加大 )。而在調(diào)節(jié)過程的后期,即誤差累積 較大時,應(yīng)加強積分作用(減小 )。將誤差累積絕對值 的模糊子集取為VB、B、M、S和VS, 的模糊子集取為PB、PS、O、NS、NB,則 的修正量 的Fuzzy控制規(guī)則如表2所示。其中, 的基本論域為[0,10],分為11個量化等級,即 ={0,1,2,3,4,5,6,7,8,9,10}, 的基本論域為[-5,+5],分為11個量化等級即 ={-5,-4,-3,-2,-1,0,1,2,3,4,5}。
(3)微分在PID控制中的作用主要是改善系統(tǒng)的動態(tài)性能,控制超調(diào)。對于變工況且不確定系統(tǒng),在調(diào)節(jié)過程的初期,即誤差的累積絕對值 較小時,應(yīng)加強微分的作用(即增大 ),而在調(diào)節(jié)過程的后期,即誤差累積的絕對值 較大時,應(yīng)減弱微分的作用(即減小 ),將 的模糊子集取為PB、PS、O、NS、NB,則 的修正量 的Fuzzy控制規(guī)則如表2所示。其中, 的的基本論域為[-1,1],分為11個量化等級即 ={-1,-0.8,-0.6,-0.4,-0.2,0,0.2,0.4,0.6,0.8,1}。
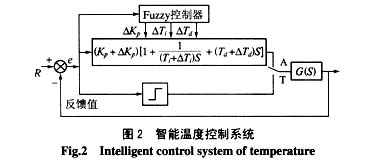
智能溫度控制系統(tǒng)結(jié)構(gòu)圖如圖2所示,當要整定參數(shù)時把開關(guān)打在T,參數(shù)整定完畢,切換到自動位置A,參數(shù)自調(diào)整控制器對控制對象進行調(diào)節(jié)。
4 智能控制器的實現(xiàn)
4.1 控制器的硬件系統(tǒng)
控制器的硬件主要由微處理機系統(tǒng),輸入通道,輸出通道,鍵盤及顯示等部分組成。
(1)微處理機系統(tǒng):由8031單片機,2764 EPROM(用于存放監(jiān)控及控制程序),2816EEPROM(用于存放自整定的參數(shù)及溫度設(shè)定值),譯碼電路與鎖存器等組成。
(2)輸入通道:由熱電偶冷端補償電路,放大電路(OP07,741),V/F,光電耦合,計數(shù)器,定時器等組成。熱電偶冷端補償電路利用PN結(jié)電壓隨溫度上升而線性下降的特性進行補償。采用兩級放大器可將毫伏級信號放大到需要幅度0~5V,由上V/F轉(zhuǎn)換成頻率量,再通過軟件的定時,計數(shù)完成A/D轉(zhuǎn)換工作。
(3)輸出通道:由D/A轉(zhuǎn)換器,V/I轉(zhuǎn)換器,輸出鎖存器和光電隔離電路組成。D/A轉(zhuǎn)換器將輸出轉(zhuǎn)換為0~5V的電壓信號,經(jīng)V/I轉(zhuǎn)換器輸出0~10mA標準電流信號。
(4)鍵盤及顯示部分:由8279,4個鍵與4個LED組成。
4.2 控制器的軟件設(shè)計
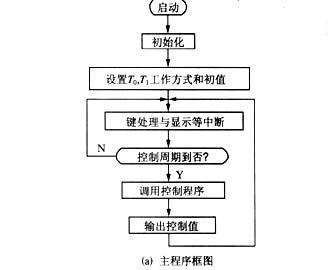
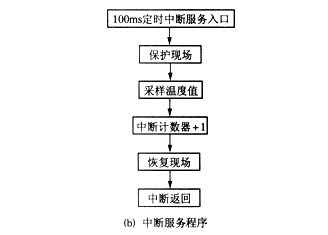
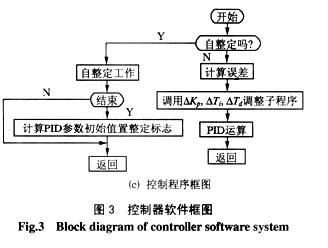
控制器的軟件主要由監(jiān)控軟件與控制軟件組成,其軟件框圖如圖3所示
4.3 調(diào)度與應(yīng)用
為了不影響窯爐的正常生產(chǎn),在PID參數(shù)整定前,先手動調(diào)節(jié)爐溫到正常工作點(1200℃)附近,并設(shè)定電動比例調(diào)節(jié)閥的開度在工作點附近±10% 范圍內(nèi)變化,使PID調(diào)節(jié)器參數(shù)整定時,爐溫變化幅度較小,如圖4所示,其中前10 min為參數(shù)整定時間。溫度的變化情況,采樣周期t=15s。
該系統(tǒng)已在現(xiàn)場長期連續(xù)運行,性能穩(wěn)定,可靠性高,采用溫度智能控制后,在設(shè)定溫度1200℃時,溫度波動范圍從原來手動控制時的 ℃降為 ℃,(見圖4),說明該系統(tǒng)具有良好的控制性能。

5 結(jié)論
(1)由于采用分布式控制系統(tǒng),上位機為586微機,軟件資源豐富,可進行集中監(jiān)控、畫面顯示、參數(shù)設(shè)定等工作,下位機能方便地與上位機交換信息,也可以單獨運行,對現(xiàn)場進行實時控制,系統(tǒng)可靠性高,且價格低廉。
(2)溫度控制器采用PID參數(shù)自整定技術(shù),可以大大縮短現(xiàn)場調(diào)試時間,特別適合于缺乏自動化工程技術(shù)人員的工廠。
(3)對于無法確定精確數(shù)學(xué)模型及變工況(象燃油爐)控制對象,采用PID控制時,先采用自整定技術(shù)確定PID參數(shù)的初值,然后根據(jù)實時數(shù)據(jù),對PID參數(shù)進行在線Fuzzy調(diào)整,是一種非常實用且有效的控制策略。
參考文獻
[1] 顏軍,吳剛,孫德敏(Yan Jun,Wu Gang,Sun Demin).集散控制系統(tǒng)中先進控制與優(yōu)化的應(yīng)用(Application of advanced control and optimization in the distributed control system)[J].微計算機信息(Microcomputer information),1999,(5):37-38.
[2] 王耀南(Wan Yaonan).智能控制系統(tǒng)-模糊邏輯·專家系統(tǒng)·神經(jīng)網(wǎng)絡(luò)控制(Intelligent control system-fuzzy logic·expert system·neural network control)[M].長沙:湖南大學(xué)出版社(Changsha:Hunan University Publishing Company),1996,10.
[3] 蔣敏為,蔣慰孫(Jiang Minwei,Jiang Weisun).過程控制中提高DCS應(yīng)用水平的途徑(The approaches to enhance the operation level of DCS in process control)[J].自動化儀表(Process Automation Instrumentation),1998,19(10):1-4.
[4] 李朝青(Li Chaoqing).單片機原理及接口技術(shù)(The principle and interface technique of single-chip microcomputer)[M].北京:北京航空航天大學(xué)出版社(Beijin:Air Space-flight University Publishing Company),1998,10.
