
引言
近幾年來(lái),,隨著海洋事業(yè)的迅速發(fā)展,海洋環(huán)保已經(jīng)提上議事日程,。因此,,海洋水環(huán)境監(jiān)測(cè)成為人們?cè)絹?lái)越關(guān)注的焦點(diǎn)。
無(wú)線傳感器網(wǎng)絡(luò)廣泛應(yīng)用于軍事偵察,、環(huán)境監(jiān)測(cè)、目標(biāo)定位等領(lǐng)域,,能夠?qū)崟r(shí)地感知,、采集和處理網(wǎng)絡(luò)覆蓋范圍內(nèi)的對(duì)象信息,并發(fā)送給觀察者,。它具有覆蓋區(qū)域廣,,可遠(yuǎn)程監(jiān)控,監(jiān)測(cè)精度高,,布網(wǎng)快速和成本低等優(yōu)點(diǎn),。把無(wú)線傳感器網(wǎng)絡(luò)技術(shù)應(yīng)用到海洋水環(huán)境監(jiān)測(cè)系統(tǒng)中,,是人們近幾年來(lái)研究的焦點(diǎn)。
Zigbee與其他的無(wú)線通信標(biāo)準(zhǔn)相比,,適用于吞吐量較小,,網(wǎng)絡(luò)建設(shè)投資小,網(wǎng)絡(luò)安全性高,,不便于頻繁更換電源的場(chǎng)合,。在工業(yè)控制領(lǐng)域利用傳感器基于Zigbee技術(shù)組成傳感器網(wǎng)絡(luò),可以使得數(shù)據(jù)采集和分析變得方便和容易,。Zigbee網(wǎng)絡(luò)用于傳感網(wǎng)絡(luò)的組建很重要的一點(diǎn)在于它的低功耗,,其發(fā)射功率僅為0~3.6dBm;它的通信距離可達(dá)30~70m,,具有能量檢測(cè)和鏈路質(zhì)量指示能力,,可以自動(dòng)地對(duì)自身的發(fā)射功率進(jìn)行調(diào)整,可以在保證通信鏈路質(zhì)量的前提下最小地消耗能量,。網(wǎng)絡(luò)功能是Zigbee最重要的特點(diǎn),,也是與其它無(wú)線局域網(wǎng)標(biāo)準(zhǔn)不同的地方。在網(wǎng)絡(luò)層方面,,Zigbee的主要工作在于負(fù)責(zé)網(wǎng)絡(luò)機(jī)制的建立與管理,,并具有自我組態(tài)與自我修復(fù)功能。
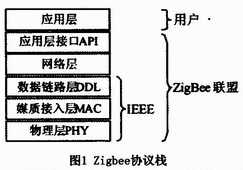
IEEE802.15.4規(guī)范是一種經(jīng)濟(jì),、高效,、低數(shù)據(jù)速率(<250kb/s)、工作在2.4GHz和868/928MHz的無(wú)線技術(shù),,網(wǎng)絡(luò)層以上協(xié)議由ZigBee聯(lián)盟制定,,IEEE802.15.4負(fù)責(zé)物理層和鏈路層標(biāo)準(zhǔn)。完整的zigBee協(xié)議套件由高層應(yīng)用規(guī)范,、應(yīng)用會(huì)聚層,、網(wǎng)絡(luò)層、以及數(shù)據(jù)鏈路層和物理層組成,。協(xié)議棧結(jié)構(gòu)如圖l所示,。
1 傳感網(wǎng)絡(luò)的構(gòu)成
本文設(shè)計(jì)的無(wú)線傳感器網(wǎng)絡(luò)的組成包括傳感器節(jié)點(diǎn)、匯聚節(jié)點(diǎn)和網(wǎng)關(guān)節(jié)點(diǎn),,主要負(fù)責(zé)探測(cè)海洋區(qū)域內(nèi)的各種情況,,包括油污檢測(cè)、濁度測(cè)量,、化學(xué)需氧量測(cè)量,、海藻測(cè)量等等。
傳感器節(jié)點(diǎn)主要負(fù)責(zé)網(wǎng)絡(luò)的形成,,海洋各項(xiàng)參數(shù)的采集,,并將數(shù)據(jù)通過(guò)多跳的形式傳輸?shù)絽R聚節(jié)點(diǎn),。
匯聚節(jié)點(diǎn)是無(wú)線傳感器網(wǎng)絡(luò)的中心節(jié)點(diǎn),負(fù)責(zé)網(wǎng)絡(luò)的發(fā)起,,拓?fù)涞男纬膳c維護(hù),,網(wǎng)路數(shù)據(jù)的匯聚與處理,與監(jiān)控系統(tǒng)的通信與信息交互,。匯聚節(jié)點(diǎn)是傳感器節(jié)點(diǎn)終端節(jié)點(diǎn)中能力較強(qiáng)的一種,。
網(wǎng)關(guān)節(jié)點(diǎn)接收來(lái)自其他節(jié)點(diǎn)的數(shù)據(jù),并對(duì)數(shù)據(jù)進(jìn)行校正,、融合等處理,,然后發(fā)送給監(jiān)測(cè)中心。對(duì)于監(jiān)測(cè)中心所發(fā)指令進(jìn)行相應(yīng)處理,,用來(lái)確定各個(gè)節(jié)點(diǎn)的工作狀態(tài),。
后臺(tái)監(jiān)測(cè)中心負(fù)責(zé)對(duì)發(fā)送回來(lái)的海洋參數(shù)數(shù)據(jù)進(jìn)行匯總與處理,網(wǎng)絡(luò)拓?fù)涞目刂?,網(wǎng)絡(luò)的監(jiān)護(hù)等工作,。
整個(gè)海洋監(jiān)測(cè)系統(tǒng)由一定數(shù)量的傳感器網(wǎng)絡(luò)終端節(jié)點(diǎn)、少量匯聚節(jié)點(diǎn),、一個(gè)網(wǎng)關(guān)節(jié)點(diǎn)以及后臺(tái)監(jiān)測(cè)系統(tǒng)組成,。為了探測(cè)一定區(qū)域,需要在該區(qū)域內(nèi)布置一定數(shù)量的傳感器節(jié)點(diǎn),,以達(dá)到對(duì)整個(gè)區(qū)域的覆蓋,,并且需要一個(gè)網(wǎng)關(guān)節(jié)點(diǎn)完成對(duì)來(lái)自傳感器終端的數(shù)據(jù)的融合,上傳給后臺(tái)監(jiān)測(cè)系統(tǒng),,完成數(shù)據(jù)的分析與處理,。從網(wǎng)關(guān)節(jié)點(diǎn)到監(jiān)控中心距離一般都比較遠(yuǎn),可采用現(xiàn)有的GPRS網(wǎng)絡(luò)進(jìn)行遠(yuǎn)程數(shù)據(jù)傳輸,。GPRS網(wǎng)絡(luò)連接費(fèi)用相對(duì)低廉,,傳輸速率較高,性價(jià)比較高,,而且能夠永遠(yuǎn)在線,。傳感網(wǎng)絡(luò)結(jié)構(gòu)示意圖如圖2所示。
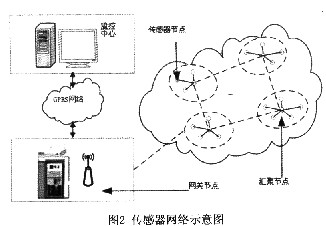
傳感器終端節(jié)點(diǎn)與匯聚節(jié)點(diǎn)能夠自動(dòng)形成一個(gè)自組織,、多跳的網(wǎng)絡(luò),。傳感器終端節(jié)點(diǎn)按指令采集數(shù)據(jù),并將數(shù)據(jù)及時(shí)地通過(guò)自適應(yīng)的路由,、多跳中繼后傳輸給網(wǎng)關(guān)節(jié)點(diǎn),網(wǎng)關(guān)節(jié)點(diǎn)將匯集的數(shù)據(jù)打包后,,轉(zhuǎn)發(fā)給后臺(tái)監(jiān)控系統(tǒng),。
2 硬件設(shè)計(jì)
本海洋監(jiān)測(cè)系統(tǒng)中的傳感器節(jié)點(diǎn)是傳感網(wǎng)絡(luò)中最重要的部分,,其硬件包括微處理器單元、一個(gè)zigbee通信模塊及電源管理模塊,;匯聚節(jié)點(diǎn)硬件包括微處理器單元,、兩個(gè)Zigbee通信模塊及電源管理模塊;網(wǎng)關(guān)節(jié)點(diǎn)硬件包括微處理器單元,、一個(gè)Zigbee通信模塊,、一個(gè)GPRS模塊及電源管理模塊。
2.1 節(jié)點(diǎn)微處理器MSP430F149單片機(jī)
由于無(wú)線傳感器網(wǎng)絡(luò)節(jié)點(diǎn)需要將傳感器輸出的模擬信號(hào)轉(zhuǎn)換為數(shù)字信號(hào),,可選擇一款集成有AD轉(zhuǎn)換功能的微控制器,。另外,無(wú)線傳感器網(wǎng)絡(luò)節(jié)點(diǎn)除完成數(shù)據(jù)采集功能外,,還要完成數(shù)據(jù)轉(zhuǎn)發(fā)和路由功能,,因而要有足夠的處理能力、程序空間及數(shù)據(jù)空間,。本設(shè)計(jì)MCU采用的是MSP-430F149單片機(jī),,它是TI公司生產(chǎn)的一種16位超低功耗混合信號(hào)處理器,稱之為混合信號(hào)處理器,,主要是由于其針對(duì)實(shí)際應(yīng)用需求,,把許多模擬電路、數(shù)字電路和微處理器集成在一個(gè)芯片上,,以提供“單片”解決方案,。其突出優(yōu)點(diǎn)是低電源電壓、超低功耗,。由于為FLASH型,,所以可以在線對(duì)單片機(jī)進(jìn)行調(diào)試和下載程序。
MSP430F149低頻輔助時(shí)鐘采用32kHz時(shí)鐘晶振直接驅(qū)動(dòng),,可作為后臺(tái)實(shí)時(shí)時(shí)鐘實(shí)現(xiàn)自喚醒功能,。集成的高速數(shù)字控制振蕩器(DCO)頻率為8MHz,可作為CPU的主系統(tǒng)時(shí)鐘(MSLK)源,,也可以作為CPU的子系統(tǒng)時(shí)鐘(SMCLK)源,。
2.2 節(jié)點(diǎn)Zigbee通信模塊CC2420
本系統(tǒng)中無(wú)線傳感器網(wǎng)絡(luò)硬件中的Zigbee通信模塊采用低功耗高性能的無(wú)線網(wǎng)絡(luò)模塊CC2420來(lái)實(shí)現(xiàn),它工作在全球通用的2.4GHz頻段,。CC2420是一款符合IEEE802.15.4標(biāo)準(zhǔn)的射頻收發(fā)器,,性能穩(wěn)定且功耗極低。CC2420的選擇性和靈敏度指數(shù)超過(guò)IEEE802.15.4標(biāo)準(zhǔn)的要求,,可確保短距離通信的有效性和可靠性,,利用此芯片開(kāi)發(fā)的無(wú)線通信設(shè)備支持?jǐn)?shù)傳速率高達(dá)250kb/s,可實(shí)現(xiàn)多點(diǎn)對(duì)多點(diǎn)的快速組網(wǎng),。 CC2420發(fā)送數(shù)據(jù)時(shí),,使用直接正交上變頻,。基帶信號(hào)的同相分量和正交分量直接被DAC轉(zhuǎn)換為模擬信號(hào),,通過(guò)低頻濾波器,,直接變頻到設(shè)定的信道上,再由天線發(fā)射出去,。
Zigbee通信模塊CC2420與單片機(jī)的連接電路,,如圖3所示。

CC2420只需要極少的外圍電路,,包括時(shí)鐘電路,、射頻I/O匹配電路和微控制器接口電路三部分。芯片本振信號(hào)既可由外部有源晶體提供,,也可以由內(nèi)部電路提供,。由內(nèi)部電路提供時(shí)需要外加晶體振蕩器和兩個(gè)負(fù)載電容,電容的大小取決于晶體的頻率及輸入容抗等參數(shù),。例如當(dāng)采用16MHz晶振時(shí),,其電容約為22pF。射頻I/O匹配電路主要用來(lái)匹配芯片的輸入/輸出阻抗,。CC2420與微處理器的連接非常方便,,它使用SFD、FIFO,、FIFOP,、和CCA四個(gè)引腳表示收發(fā)數(shù)據(jù)的狀態(tài);微處理器通過(guò)SPI接口與CC2420交換數(shù)據(jù),、發(fā)送命令等,。
CC2420收到物理幀的SFD字段后,會(huì)在SFD引腳輸出高電平,,直到接收完該幀,。如果啟動(dòng)了地址辨識(shí),在地址辨識(shí)失敗后,,SFD引腳立即轉(zhuǎn)為輸出低電平,。FIFO和FIFOP引腳表示接收FIFO的緩存區(qū)狀態(tài),如果接收FIFO緩存區(qū)有數(shù)據(jù),,F(xiàn)IFO引腳輸出高電平,;當(dāng)接收FIFO緩存區(qū)為空,F(xiàn)IFO引腳輸出低電平,;當(dāng)FIFO引腳在接收FIFO緩存區(qū)的數(shù)據(jù)超過(guò)某個(gè)臨界值時(shí),,或在CC2420接收到一個(gè)完整的幀以后輸出高電平臨界值時(shí),可以通過(guò)CC2420的寄存器設(shè)置。CCA引腳在信道上有信號(hào)時(shí)輸出高電平,,它只在接收狀態(tài)下有效,,在CC2420進(jìn)入接收狀態(tài)至少8個(gè)符號(hào)周期后,才會(huì)在CCA引腳上輸出有效的信道狀態(tài)信息,。
SPI接口由CSn、SI,、SO和SCLK引腳組成,,微處理器通過(guò)SPI接口訪問(wèn)CC2420內(nèi)部寄存器和存儲(chǔ)器。在訪問(wèn)過(guò)程中,,CC2420是SPI接口的從設(shè)備,,接收來(lái)自微處理器的時(shí)鐘信號(hào)和片選信號(hào)并在微處理器的控制下執(zhí)行輸入/輸出操作。SPI接口接收或者發(fā)送數(shù)據(jù)時(shí),,都與時(shí)鐘下降沿對(duì)齊,,CC2420與MSP430F149是通過(guò)SPI連接的,其中MSP430F149處于主模式,,CC2420處于從模式,。MSP430F149還有4個(gè)I/O口與CC2420相連,主要起查詢CC2420狀態(tài)的作用,。
電源管理模塊為傳感器單元,、處理器單元、無(wú)線通信模塊提供能源,,并對(duì)電源進(jìn)行管理,,以提高能量的利用率。
2.3 系統(tǒng)IEEE802.15.4工作模式
IEEE802.15.4規(guī)范中規(guī)定使用DSSS調(diào)制方式,,CC2420中的調(diào)制和擴(kuò)頻功能框圖如圖4所示,。

每個(gè)字節(jié)分為兩組符號(hào),4位一組,,低位符號(hào)首先傳送,,對(duì)于多字節(jié)域,則是低位字節(jié)首先傳送,,但是,,與安全有關(guān)的域先傳送高位字節(jié)。每個(gè)符號(hào)映射為一個(gè)超過(guò)16位的偽隨機(jī)序列,,即32位片碼序列,。片碼序列以2Mchip/s的速率傳送,對(duì)于每個(gè)符號(hào),,首先傳送低位片碼,。
調(diào)制方式為偏移正交相移鍵控,具有半個(gè)正弦的形狀,相當(dāng)于最小頻移鍵控(MFSK)調(diào)制,,每片的形狀通過(guò)半個(gè)正弦波交替在同相和正交相位信道傳送,。
2.4 數(shù)據(jù)通信幀格式設(shè)置
同步頭包括前導(dǎo)序列和開(kāi)始幀分隔符,在CC2420中前導(dǎo)序列長(zhǎng)度和開(kāi)始幀分隔符是能設(shè)置的,,默認(rèn)值4字節(jié)和1字節(jié),,是符合IEEE.80 2.15.4協(xié)議的;物理頭位為1字節(jié),,幀控制和序列號(hào)分別為2字節(jié)和1字節(jié):地址和源地址共6字節(jié),,待發(fā)數(shù)據(jù)段長(zhǎng)度為幀長(zhǎng)度減去地址和幀校驗(yàn)序列。當(dāng)MODEMCTRL0.AUTOCRC控制位置位時(shí),,這個(gè)幀校驗(yàn)序列自動(dòng)產(chǎn)生2字節(jié),,并由CC2420硬件自動(dòng)插入。
3 軟件設(shè)計(jì)
本設(shè)計(jì)中,,無(wú)線傳感器網(wǎng)絡(luò)是一個(gè)多路的自組織無(wú)線網(wǎng)絡(luò),,可以實(shí)現(xiàn)自動(dòng)組網(wǎng),自動(dòng)路由查詢,,自動(dòng)數(shù)據(jù)采集與傳輸,,軟件設(shè)計(jì)上必須能夠?qū)崿F(xiàn)多跳自組織的功能。另外,,傳感器節(jié)點(diǎn)必須要求極低的功耗,,而低功耗除了硬件設(shè)計(jì)上的低功耗外,更重要的是軟件設(shè)計(jì)的低功耗,。
此無(wú)線傳感器網(wǎng)絡(luò)終端在開(kāi)機(jī)后首先進(jìn)行自檢,,如果自檢失敗了,則進(jìn)行硬件故障提示,,而且自動(dòng)關(guān)機(jī),。在自檢通過(guò)后,進(jìn)一步判斷工作模式,。傳感器節(jié)點(diǎn)在自檢通過(guò)后進(jìn)入接入狀態(tài),,如果接入失敗則進(jìn)入等待狀態(tài)。處于等待狀態(tài)的節(jié)點(diǎn)關(guān)閉射頻收發(fā)器以節(jié)省功耗,,當(dāng)?shù)却〞r(shí)器溢出時(shí),,節(jié)點(diǎn)再次回到接入狀態(tài)進(jìn)行新的介入嘗試。如果節(jié)點(diǎn)接入成功便轉(zhuǎn)入業(yè)務(wù)狀態(tài),。處于業(yè)務(wù)狀態(tài)的節(jié)點(diǎn),,完成數(shù)據(jù)的采集與傳輸,對(duì)近節(jié)點(diǎn)數(shù)據(jù)的中繼轉(zhuǎn)發(fā),,新節(jié)點(diǎn)入網(wǎng)的介入確認(rèn)等操作,。節(jié)點(diǎn)為了實(shí)現(xiàn)低功耗,,必須在業(yè)務(wù)狀態(tài)(活動(dòng)狀態(tài))與休眠狀態(tài)之間輪換。
軟件開(kāi)發(fā)以IAR Embedded Workbench V2.10為平臺(tái),,采用C語(yǔ)言編寫(xiě),。節(jié)點(diǎn)的MSP430系列單片機(jī)支持C語(yǔ)言程序設(shè)計(jì)。適用于MSP430系列的C語(yǔ)言與標(biāo)準(zhǔn)C語(yǔ)言兼容程度高,,大大提高了軟件開(kāi)發(fā)的工作效率,,增強(qiáng)了程序代碼的可靠性、可讀性和可移植性,。軟件編程的基本思想是:先對(duì)SPI,、CC2420控制端口初始化,使能SPI,、UART端口,使能ADC,,開(kāi)機(jī)后,,就可以運(yùn)行任務(wù)程序,實(shí)現(xiàn)接收或發(fā)送數(shù)據(jù)及命令了,。
傳感器節(jié)點(diǎn),、匯聚節(jié)點(diǎn)的工作流程如圖5所示。
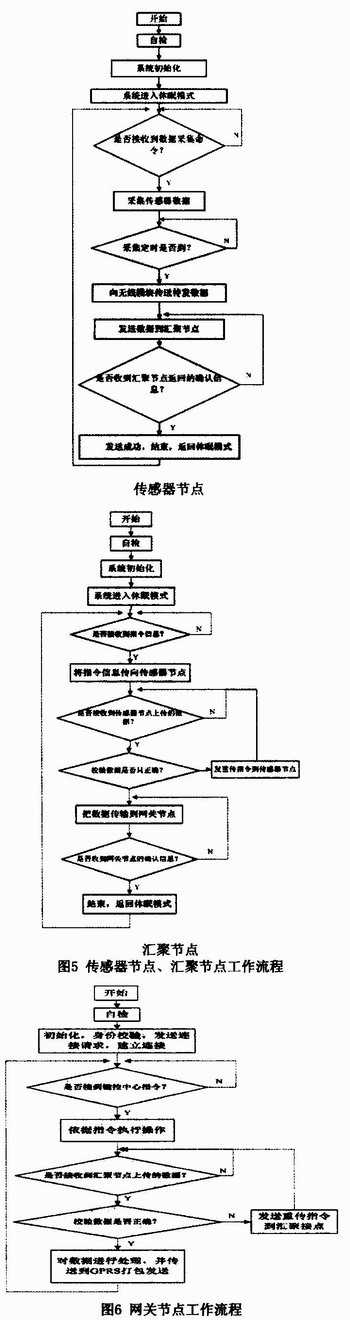
對(duì)于網(wǎng)關(guān)節(jié)點(diǎn)的設(shè)計(jì),,接收數(shù)據(jù)部分仍采用CC2420無(wú)線收發(fā)模塊,,可以采用統(tǒng)一的傳輸協(xié)議,保證傳輸?shù)目煽啃?;由于還要進(jìn)行數(shù)據(jù)的處理,,網(wǎng)關(guān)節(jié)點(diǎn)就不附加傳感器了,以便提高處理器對(duì)數(shù)據(jù)的處理能力,,MCU統(tǒng)一采用MSP430F149單片機(jī),;同時(shí),監(jiān)控中心一般遠(yuǎn)離監(jiān)測(cè)點(diǎn),,需要采用GPRS模塊來(lái)實(shí)現(xiàn)數(shù)據(jù)的遠(yuǎn)程傳輸,。其工作流程如圖6所示。
4 結(jié)論
本文設(shè)計(jì)的有關(guān)海洋水環(huán)境監(jiān)測(cè)的無(wú)線傳感器網(wǎng)絡(luò)綜合運(yùn)用了無(wú)線傳感技術(shù),、嵌入式計(jì)算技術(shù),、現(xiàn)代網(wǎng)絡(luò)技術(shù)、無(wú)線通信技術(shù)和分布式智能信息處理技術(shù),,將功能相同或不同的無(wú)線智能傳感器構(gòu)成網(wǎng)絡(luò)化,、智能化的傳感網(wǎng)絡(luò),大大提高了監(jiān)測(cè)海洋各項(xiàng)參數(shù)的傳感器的監(jiān)測(cè)能力,。這樣的基于無(wú)線傳感器網(wǎng)絡(luò)的實(shí)時(shí)監(jiān)控系統(tǒng)采用中短距離,、低功耗無(wú)線網(wǎng)絡(luò),,射頻傳輸成本低;可根據(jù)需要采用多種供電模式,,節(jié)能效果好,;可實(shí)現(xiàn)靈活的快速組網(wǎng)和自動(dòng)配置,擴(kuò)展性好,。