
摘? 要: 介紹了采用實(shí)際控制器輸出的PWM開(kāi)關(guān)邏輯信號(hào)定義正、負(fù)半橋" title="半橋">半橋開(kāi)關(guān)函數(shù),建立逆變器的Simulink實(shí)時(shí)模型。該模型既可實(shí)現(xiàn)電力驅(qū)動(dòng)實(shí)時(shí)仿真" title="實(shí)時(shí)仿真">實(shí)時(shí)仿真系統(tǒng)中逆變器與電機(jī)模型的解耦,又可以確定逆變器開(kāi)關(guān)死區(qū)時(shí)間。還給出了基于dSPACE實(shí)時(shí)仿真環(huán)境的逆變器-異步電機(jī)實(shí)時(shí)仿真系統(tǒng)" title="實(shí)時(shí)仿真系統(tǒng)">實(shí)時(shí)仿真系統(tǒng)的實(shí)現(xiàn)方法,針對(duì)開(kāi)關(guān)頻率為1kHz的逆變器,采樣周期為11μs的實(shí)時(shí)仿真與仿真步長(zhǎng)為100ns的離線仿真的結(jié)果無(wú)明顯差別。
關(guān)鍵詞: 逆變器? 開(kāi)關(guān)函數(shù)? 實(shí)時(shí)仿真
?
在交通和某些工業(yè)領(lǐng)域中的電力驅(qū)動(dòng)系統(tǒng)" title="驅(qū)動(dòng)系統(tǒng)">驅(qū)動(dòng)系統(tǒng)的研制過(guò)程中,直接使用實(shí)際電機(jī)系統(tǒng)對(duì)新的控制器進(jìn)行測(cè)試,實(shí)現(xiàn)起來(lái)比較困難,而且費(fèi)用較高。因此,需要介于離線仿真和實(shí)機(jī)試驗(yàn)之間的逆變器-交流電機(jī)實(shí)時(shí)仿真器,與實(shí)際控制器硬件相連,在閉環(huán)條件下對(duì)實(shí)際控制器進(jìn)行實(shí)時(shí)測(cè)試。由于這種實(shí)時(shí)仿真系統(tǒng)回路中有實(shí)際控制器硬件的介入,因此被稱為硬件在回路仿真(Hardware-in-the-Loop Simulation)。
盡管在真實(shí)系統(tǒng)上進(jìn)行試驗(yàn)是必不可少的,但是由于采用實(shí)機(jī)難以進(jìn)行極限與失效測(cè)試,而采用實(shí)時(shí)仿真器可以自由地給定各種測(cè)試條件,測(cè)試被測(cè)控制器的性能,因此實(shí)時(shí)仿真器可作為快速控制原型(Rapid Control Prototyping)的虛擬試驗(yàn)臺(tái),在電機(jī)、逆變器、電源和控制器需要同時(shí)工作的并行工程中必不可少。
由于目前數(shù)字計(jì)算機(jī)處理速度的限制,不能實(shí)現(xiàn)亞微秒級(jí)物理模型實(shí)時(shí)仿真,需要對(duì)逆變器開(kāi)關(guān)過(guò)程進(jìn)行理想化處理,因此引入了離散事件系統(tǒng)。離散事件逆變器子系統(tǒng)與連續(xù)時(shí)間電機(jī)子系統(tǒng)耦合,使變流器-電機(jī)實(shí)時(shí)仿真器成為變因果和變結(jié)構(gòu)系統(tǒng)。變因果是指離散開(kāi)關(guān)事件發(fā)生前后,描述連續(xù)時(shí)間電機(jī)子系統(tǒng)的動(dòng)態(tài)方程的輸入變量與輸出變量會(huì)變換位置;變結(jié)構(gòu)是指在仿真進(jìn)程中,離散開(kāi)關(guān)事件引發(fā)狀態(tài)轉(zhuǎn)換,使連續(xù)系統(tǒng)結(jié)構(gòu)發(fā)生變化。因而需要對(duì)動(dòng)態(tài)方程不斷地進(jìn)行調(diào)整和初始化[1]。
框圖建模工具Simulink是控制工程仿真的工業(yè)標(biāo)準(zhǔn),但Simulink本質(zhì)上是一種賦值運(yùn)算,由其方框圖描述的系統(tǒng)是因果的。為了能應(yīng)用Simulink建模工具,應(yīng)該使變流器-電機(jī)實(shí)時(shí)仿真系統(tǒng)解耦為兩個(gè)獨(dú)立子系統(tǒng),以消除變因果、變結(jié)構(gòu)問(wèn)題。
作為功能性建模方法之一的開(kāi)關(guān)函數(shù),可用于確定變流器開(kāi)關(guān)器件電壓與電流波形計(jì)算,以便進(jìn)行系統(tǒng)優(yōu)化設(shè)計(jì)。它在變流器的離線仿真中已得到成功的應(yīng)用[2~3]。本文應(yīng)用文獻(xiàn)[2]的開(kāi)關(guān)函數(shù)描述法,采用實(shí)際控制器輸出的PWM開(kāi)關(guān)邏輯信號(hào)定義正、負(fù)半橋開(kāi)關(guān)函數(shù),建立逆變器的Simulink模型。該模型既可實(shí)現(xiàn)實(shí)時(shí)仿真系統(tǒng)中逆變器與電機(jī)模型的解耦,又可以確定逆變器設(shè)置的開(kāi)關(guān)死區(qū)時(shí)間,防止同一橋臂開(kāi)關(guān)管" title="開(kāi)關(guān)管">開(kāi)關(guān)管直通。文中還將給出基于dSPACE實(shí)時(shí)環(huán)境的逆變器-異步電機(jī)開(kāi)環(huán)控制系統(tǒng)實(shí)時(shí)仿真的實(shí)現(xiàn)方法和結(jié)果。
1 逆變器Simulink模型
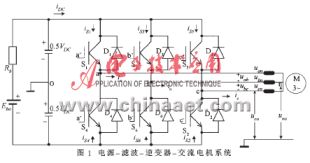
雙電平三相電壓源型逆變器由6個(gè)開(kāi)關(guān)管和6個(gè)與開(kāi)關(guān)管反向并接的續(xù)流二極管組成,見(jiàn)圖1。采用實(shí)際控制器輸出的6個(gè)PWM開(kāi)關(guān)邏輯信號(hào)a+,b+,c+;a-,b-,c-定義逆變器a,b,c三相正半橋開(kāi)關(guān)函數(shù):

和負(fù)半橋開(kāi)關(guān)函數(shù):

則全橋開(kāi)關(guān)函數(shù)為:

?
?
逆變器輸出端a,b,c與直流電源中點(diǎn)o之間的電壓為:uao=0.5VDC×SFab, ubo=0.5VDC×SFb, uco=0.5VDC×SFc,
其中,VDC為直流環(huán)路電壓。由此得到線電壓為:

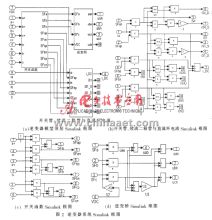
其中,iS1_S,iS1_D,iS4_S,iS4_D分別為a相正、負(fù)半橋開(kāi)關(guān)管和續(xù)流二極管電流。據(jù)此,可建立逆變器的Simulink框圖模型。圖2(a)~(d)分別是逆變器模型頂層和底層的Simulink框圖。
?
?
2 實(shí)時(shí)仿真系統(tǒng)實(shí)現(xiàn)
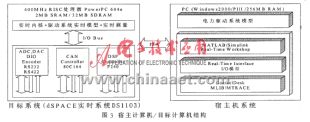
著名的機(jī)電控制系統(tǒng)開(kāi)發(fā)平臺(tái)較是基于MATLAB/Simulink/Real-Time Workshop[4~5]開(kāi)發(fā)的dSPACE實(shí)時(shí)系統(tǒng)。本文的相關(guān)課題選用單板dSPACE系統(tǒng)DS1103。
DS1103采用32位精簡(jiǎn)指令集處理器PowerPC 604e進(jìn)行浮點(diǎn)運(yùn)算。精簡(jiǎn)指令集處理器采用小指令集、多寄存器結(jié)構(gòu),指令執(zhí)行簡(jiǎn)單快速;統(tǒng)一用單周期指令,克服了復(fù)雜指令集處理器周期指令有長(zhǎng)有短,造成運(yùn)行中偶發(fā)不確定性,致使運(yùn)行失常的弊端。
DS1103板插入PC機(jī)主板的ISA擴(kuò)展槽中,由PC機(jī)提供電源,所有的實(shí)時(shí)計(jì)算都是由DS1103獨(dú)立執(zhí)行,而dSAPCE 的試驗(yàn)工具軟件則并行運(yùn)行于PC主機(jī)上。宿主計(jì)算機(jī)/目標(biāo)計(jì)算機(jī)結(jié)構(gòu)如圖3所示。
?
?
Real-Time Interface(RTI)是dSPACE系統(tǒng)的實(shí)時(shí)實(shí)現(xiàn)軟件,它對(duì)實(shí)時(shí)代碼生成軟件Real-Time Workshop進(jìn)行擴(kuò)展,集成了dSPACE系統(tǒng)I/O硬件實(shí)時(shí)模型,可實(shí)現(xiàn)從Simulink模型到dSPACE系統(tǒng)實(shí)時(shí)C代碼的自動(dòng)生成,生成的實(shí)時(shí)代碼包括實(shí)時(shí)內(nèi)核和應(yīng)用代碼[6]。RTI還根據(jù)信號(hào)和參數(shù)產(chǎn)生一個(gè)變量文件,可以用dSPACE的試驗(yàn)工具軟件ControlDesk進(jìn)行訪問(wèn)[7]。
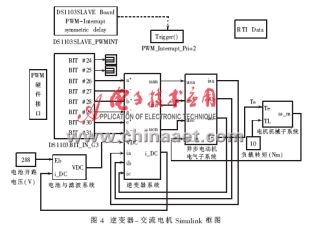
在功能強(qiáng)大的實(shí)時(shí)代碼實(shí)現(xiàn)軟件RTI與界面友好的試驗(yàn)軟件ControlDesk支持下,可以很快地實(shí)現(xiàn)電力驅(qū)動(dòng)系統(tǒng)快速控制原型或硬件在回路仿真測(cè)試。圖4是采用上述的逆變器模型與dSPACE系統(tǒng)I/O硬件模型組建的逆變器-交流電機(jī)系統(tǒng)Simulink框圖。圖中下部是逆變器-異步電機(jī)系統(tǒng)模型,作為實(shí)時(shí)任務(wù)T1,模型具有與實(shí)際控制器的硬件接口,可輸入6路實(shí)際的PWM開(kāi)關(guān)信號(hào),輸出電流、電壓等模擬信號(hào);上部是PWM控制器模型,作為實(shí)時(shí)任務(wù)T2,模型由DSP控制器F240硬件產(chǎn)生實(shí)時(shí)PWM信號(hào)。T1與T2以異步采樣模式工作,構(gòu)成兩定時(shí)器任務(wù)系統(tǒng)。為減少采樣控制器輸出引發(fā)的可變延時(shí)造成抖動(dòng)的影響,設(shè)置T1的采樣速率遠(yuǎn)高于T2的采樣速率。
?
3 實(shí)時(shí)仿真結(jié)果
系統(tǒng)仿真是針對(duì)某電動(dòng)汽車(chē)電力驅(qū)動(dòng)系統(tǒng)的,其中逆變器參數(shù)為:PWM開(kāi)關(guān)頻率fPWM=1kHz,開(kāi)關(guān)死區(qū)時(shí)間=7μs;直流電源與濾波參數(shù)為:電池開(kāi)路電壓Ebo=288V,電源內(nèi)阻Rb=0.03Ω,濾波電容C=10000μF;異步電機(jī)參數(shù)為:132V,182A,50Hz,45kW,2900rpm;負(fù)載轉(zhuǎn)矩=50Nm;交流電源參數(shù)為:相電壓幅值=100V,頻率=50Hz。實(shí)時(shí)仿真采用Euler數(shù)值積分方法(ODE1),T1采樣周期=11μs,T2采樣周期=PWM周期=1ms。
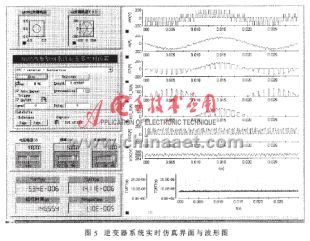
圖5是相電壓uan、相電流ia、a相上半橋開(kāi)關(guān)電流iS1、S1開(kāi)關(guān)管電流iS1_S、S1續(xù)流二極管電流iS1_D、直流環(huán)路電壓VDC、直流環(huán)路電流iDC、任務(wù)總執(zhí)行時(shí)間T1/tTT和T2/tTT的實(shí)時(shí)仿真波形。圖中還顯示出逆變器的輸出電壓空間矢量的矢端軌跡為正六邊形,并內(nèi)含從零電壓矢量至六邊形頂點(diǎn)的連線;而電機(jī)的轉(zhuǎn)子磁鏈空間矢量的矢端軌跡為圓形。實(shí)時(shí)仿真系統(tǒng)經(jīng)長(zhǎng)時(shí)間連續(xù)運(yùn)行,沒(méi)有出現(xiàn)數(shù)值不穩(wěn)定問(wèn)題。
?
?
作為比較,對(duì)相同系統(tǒng)參數(shù)的逆變器-交流電機(jī)系統(tǒng)進(jìn)行步長(zhǎng)為100ns的離線仿真,并采用與實(shí)時(shí)仿真相同的Simulink模型(無(wú)硬件接口)和數(shù)值積分方法。結(jié)果是更小的步長(zhǎng)并沒(méi)有對(duì)仿真精度有明顯的改進(jìn),這表明步長(zhǎng)為11μs的實(shí)時(shí)仿真已經(jīng)具有較高的仿真精度。
本文提出的逆變器模型已分別在交流永磁同步電機(jī)、無(wú)刷直流電機(jī)和異步電機(jī)驅(qū)動(dòng)系統(tǒng)的硬件在回路仿真測(cè)試中得到成功應(yīng)用。
?
參考文獻(xiàn)
1 P. Terwiesch, T. Keller, E. Schreiber.Rail Vehicle Control System Integration Test Using?Digital Hardware-in the-Loop Simulation. IEEE Trans. on Control System Technology,?1999;7(3):352~362
2 B. K. Lee, M. Ehsani. A Simplified Functional Simulation Model for Three-Phase?Voltage-Source Inverter Using Switching?Function Concept. IEEE Trans. on Ind.Electronics, 2001;48(2):309~321
3 L. Salazar and G. Joos. PSPICE Simulation?of Three- phase Inverters by Means of?Switching Functions.IEEE Trans. on Power?Electron, 1994;9(1):35~42
4 MathWorks. Using Simulink 4.1. MA: The?MathWorks Inc.,2001
5 MathWorks. Real-Time Workshop User′s?Guide 4.1 [Z].MA: The MathWorks Inc.,?2001
6 dSPACE.Real-Time Interface Implementation?Guide (Version 4.2) [Z].Paderborn:dSPACE
? GmbH, 2001
7 dSPACE. ControlDesk Experiment Guide?(Version 2.1) [Z]. Paderborn: dSPACE?GmbH, 2001