
摘? 要: 提出一種采用時間片輪轉(zhuǎn)算法改進單片機系統(tǒng)程序設(shè)計" title="程序設(shè)計">程序設(shè)計,實現(xiàn)多任務(wù)機制" title="多任務(wù)機制">多任務(wù)機制的軟件設(shè)計方法,并給出了在MCS-51分級分布式系統(tǒng)" title="分布式系統(tǒng)">分布式系統(tǒng)中應(yīng)用該算法進行程序設(shè)計的實例。
關(guān)鍵詞: 時間片? 多任務(wù)機制? 單片機系統(tǒng)
?
傳統(tǒng)的單任務(wù)編程思想對于明顯的順序控制要求編程簡單、思路清晰、開發(fā)周期短;但對于任務(wù)較多、控制功能復(fù)雜的問題時,卻難以滿足要求。因此,有必要對傳統(tǒng)的單任務(wù)設(shè)計思想進行改進。時間片輪轉(zhuǎn)算法是實現(xiàn)多任務(wù)調(diào)度的一種常用算法。在這種算法中,系統(tǒng)將所有的任務(wù)按順序排成一個隊列,每次調(diào)度時把CPU分配給隊首的任務(wù),并令其執(zhí)行一個時間片,構(gòu)成微觀上輪流運行、宏觀上并行執(zhí)行的多任務(wù)效果。作者在基于單片機的分級分布式控制系統(tǒng)——程控對講系統(tǒng)的用戶控制器程序中引入多任務(wù)機制,采用時間片輪轉(zhuǎn)算法極大地改善了程序結(jié)構(gòu),實現(xiàn)了對32個獨立用戶的有效控制。這種程序設(shè)計思想也可以用到其它以單片機為核心的分級分布控制系統(tǒng)的軟件設(shè)計中。
1 系統(tǒng)組成
程控對講系統(tǒng)是一個基于MCS-51的多級分布式系統(tǒng),用戶控制器是其中的一級,整個系統(tǒng)總體結(jié)構(gòu)如圖1所示。
?

?
主控制器" title="主控制器">主控制器以單片機AT89C52為核心擴展非易失性存儲器及其它功能器件,完成系統(tǒng)各用戶對講關(guān)系的編程和存儲,并根據(jù)對講關(guān)系對用戶模塊進行實時控制。用戶控制器以單片機AT89C52為核心擴展用戶機接口模塊組成,每個用戶控制器負(fù)責(zé)對其下一級的32個用戶機進行管理與控制。
主控制器與用戶控制器之間的信息交換采用主從方式的串行通信。主控制器對8個用戶控制器輪流查詢,各用戶控制器只對與本模塊相關(guān)的命令作出反應(yīng)。用戶控制器通過雙絞線與用戶機相連,以降低系統(tǒng)成本。用戶機與用戶控制器之間傳輸距離較遠,最遠可達8km。為保證在復(fù)雜的環(huán)境中正確傳輸數(shù)據(jù),兩者之間的通信采用DTMF編碼。
2 任務(wù)的分配和時間片的劃分
2.1 用戶控制器子任務(wù)的確定
用戶控制器需要實時管理32個獨立的用戶機,一方面實時接收用戶機的呼叫信號進行處理后傳送給主控制器;另一方面根據(jù)系統(tǒng)工作狀況向用戶機發(fā)送被呼叫信息。
用戶控制器接收來自用戶機的信號有兩類。一類是DTMF編碼信號,用于檢測用戶機是否需要呼叫其它用戶機。用戶機與控制器之間傳送數(shù)據(jù)的位數(shù)是不等長的,每位DTMF編碼數(shù)據(jù)的發(fā)送至少需要104ms,發(fā)送時間和空閑時間各占一半。另一類是話音信號,DTMF編碼信號和話音信號的復(fù)用可以降低系統(tǒng)的線路成本。
在每次通話結(jié)束后,為使用戶控制器能啟動下一輪的DTMF編碼數(shù)據(jù)的接收,用戶機需要給用戶控制器發(fā)送一個起始信號——掛機信號。用戶機的工作電源直接從用戶線路上提取,在話音和DTMF編碼傳送時用戶線路有一定的工作電流(大于20mA),掛機信號使用戶線路上電流接近于零(小于5mA),用戶控制器檢測用戶線路上電流的這種變化后,進入新一輪的DTMF編碼數(shù)據(jù)通信。掛機信號的持續(xù)時間為78ms。
用戶控制器向用戶機發(fā)送的只有DTMF編碼數(shù)據(jù),用于告訴用戶機誰正在呼叫它。
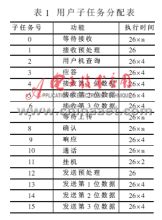
要完成一個呼叫過程(即使通話時間為零),至少需要2×104ms(接收、發(fā)送DTMF編碼時間)+78ms(掛機時間)=286ms;完成一個被呼叫過程也至少需要2×104ms=208ms。如果每個用戶機在呼叫或被呼叫時獨占用戶控制器,則用戶控制器對其它用戶機的請求就不能實時作出響應(yīng)。為解決這個問題,在用戶控制器程序設(shè)計過程中引入多任務(wù)機制。為便于任務(wù)調(diào)度程序" title="調(diào)度程序">調(diào)度程序的調(diào)度,根據(jù)用戶操作流程將用戶機的操作細分為16個子操作,每個子操作構(gòu)成一個子任務(wù),用戶子任務(wù)分配表如表1所示。
?
?
2.2 時間片的劃分
在時間片輪轉(zhuǎn)算法中,時間片的大小對系統(tǒng)性能有很大影響。如果時間片太大,大到每個任務(wù)都能在一個時間片內(nèi)執(zhí)行完畢,則時間片輪轉(zhuǎn)算法便退化為FCFS算法。時間片的確定通常要考慮三個因素:任務(wù)的數(shù)目、系統(tǒng)對響應(yīng)時間的要求、系統(tǒng)的處理能力。
本系統(tǒng)中用戶控制器需要對32個用戶機進行管理控制,應(yīng)劃分成32個時間片。在不同時刻每個用戶機處于不同的工作狀況,用戶控制器需要執(zhí)行不同的用戶機任務(wù),其處理時間也不相同。為縮短程序運行時間把,時間片設(shè)置為可變的,時間片的長短取決于各個用戶機子任務(wù)的工作量。但用戶控制器與用戶機之間的通信時間要求很嚴(yán),如DTMF的發(fā)送定時時間為104ms,包括52ms發(fā)送時間和52ms空閑時間,所以用戶控制器必須在52ms內(nèi)對每個用戶機巡檢一次,才能正確地接收用戶機的編碼數(shù)據(jù)。也就是說一個任務(wù)調(diào)度周期不應(yīng)大于52ms。為滿足用戶機與控制器之間的通信對時間要求,對整個任務(wù)調(diào)度周期進行精確定時。
綜合考慮本系統(tǒng)中與時間片劃分相關(guān)的三種因素:單片機本身的運算速度、用戶機數(shù)目及用戶機與控制器之間信號的傳送要求,確定任務(wù)調(diào)度周期為26ms。即在26ms內(nèi)用戶控制器對其下一級的32個用戶機的任務(wù)都要執(zhí)行一次。一般完成一個任務(wù)占用一個時間片,較長任務(wù)可以占用多個時間片,如14號子任務(wù)(發(fā)送第2位DTMF編碼數(shù)據(jù))需要占用4個時間片才能完成。
為實時掌握各用戶機的運行狀態(tài),在用戶控制器的存儲器中開辟出一個緩沖區(qū)作為任務(wù)記錄表,供任務(wù)調(diào)度程序使用。任務(wù)記錄表中設(shè)置了三項內(nèi)容:用戶編號、子任務(wù)號及時間片數(shù),如表2所示。
?

?
3 軟件設(shè)計
3.1 任務(wù)調(diào)度程序的設(shè)計
根據(jù)上述分析,可以確定任務(wù)調(diào)度程序的功能:
(1)按用戶機編號調(diào)用各用戶子任務(wù);
(2)完成一個調(diào)度周期的時間不超過26ms,并在每個周期結(jié)束時對26ms進行精確定時;
(3)在調(diào)度周期開始時,讀取所有用戶的DTMF編碼和摘/掛機狀態(tài),供各用戶子任務(wù)處理;
(4)在調(diào)度周期結(jié)束前,根據(jù)用戶子任務(wù)處理結(jié)果向用戶機發(fā)送DTMF編碼。
調(diào)度程序的流程如圖2所示。
?

?
3.2 用戶子任務(wù)的設(shè)計
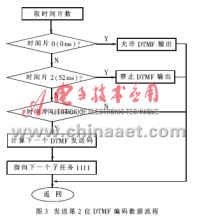
用戶子任務(wù)根據(jù)該用戶緩沖區(qū)的數(shù)據(jù)進行處理,并把處理結(jié)果存放于結(jié)果單元。各個子任務(wù)并不與外部輸入輸出接口直接交換數(shù)據(jù),對接口的輸入輸出由任務(wù)調(diào)度程序在調(diào)度周期開始和結(jié)束時調(diào)用專門子程序完成。用戶子任務(wù)的切換工作根據(jù)操作流程在各子任務(wù)中完成。用戶的操作被細分為16個子操作,相應(yīng)地有16個子任務(wù),圖3為14號子任務(wù)的流程圖。
?
?
在該子任務(wù)的開始(0ms)和中間(52ms)時刻設(shè)置DTMF數(shù)據(jù)發(fā)送緩沖區(qū),分別允許和禁止DTMF編碼的發(fā)送。在該子任務(wù)結(jié)束時根據(jù)該用戶緩沖區(qū)內(nèi)需發(fā)送的數(shù)據(jù)計算第2個DTMF值,并修改任務(wù)記錄表中該用戶的調(diào)度數(shù)據(jù),指向它的下一個子任務(wù)。其它子任務(wù)的設(shè)計思想與此子任務(wù)類似。
本文在單片機實時控制系統(tǒng)中引入了現(xiàn)代操作系統(tǒng)的多任務(wù)思想,采用時間片輪轉(zhuǎn)調(diào)度算法對傳統(tǒng)單片機編程思想進行了改進,并應(yīng)用在基于MCS-51的分級分布式系統(tǒng)中,有效地完成了對32個獨立用戶的控制。實踐證明這種結(jié)構(gòu)清晰、調(diào)度靈活,適用于定時要求復(fù)雜、實時性要求強的系統(tǒng)。
?
參考文獻
1 湯子瀛.計算機操作系統(tǒng).西安:西安電子科技大學(xué)出版社,1999
2 張友德.單片微型機原理、應(yīng)用與實驗.上海:復(fù)旦大學(xué)出版社,1998
?