
基于DSP的成像制導(dǎo)仿真圖像生成技術(shù)研究
摘要: 為了能夠?qū)崿F(xiàn)仿真圖像的實(shí)時(shí)顯示,,在設(shè)計(jì)DSP視頻生成系統(tǒng)時(shí),,DSP的選擇該系統(tǒng)設(shè)計(jì)的關(guān)鍵,為此這里選用TMS320C6418型DSP。以TMS320C6418為核心的圖像生成仿真系統(tǒng)的系統(tǒng)原理框圖
關(guān)鍵詞:
DSP
仿真圖像.TMS320C6418
Abstract:
Key words :
新一代精確制導(dǎo)武器系統(tǒng)的研制給光學(xué)成像制導(dǎo)仿真目標(biāo)模擬器提出了新的要求,,它要求目標(biāo)/背景成像仿真系統(tǒng)能夠提供實(shí)時(shí)變化的動(dòng)態(tài)場(chǎng)景,。導(dǎo)彈的實(shí)體仿真不僅需要有造價(jià)昂貴的導(dǎo)彈或模型,而且要有占地宏大的靶場(chǎng),,還要有大量的人員進(jìn)行觀測(cè),、記錄及控制等一系列工作;而且一經(jīng)發(fā)射,,過程不可逆轉(zhuǎn),,是一件非常費(fèi)錢、費(fèi)時(shí),、費(fèi)力的工作,。其中基于DSP的圖像生成技術(shù)是一項(xiàng)新型而又關(guān)鍵的技術(shù),它可以降低研發(fā)成本,,減少風(fēng)險(xiǎn),,為系統(tǒng)技術(shù)進(jìn)步提供有力的保障。這里主要給出利用圖像生成技術(shù)生成的動(dòng)態(tài)場(chǎng)景,,并模擬導(dǎo)彈在俯仰,、航向方向工作時(shí)動(dòng)態(tài)場(chǎng)景的變化。
1 成像制導(dǎo)仿真系統(tǒng)設(shè)計(jì)
1.1 系統(tǒng)的組成
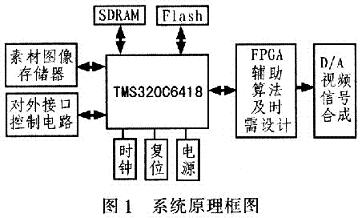
為了能夠?qū)崿F(xiàn)仿真圖像的實(shí)時(shí)顯示,,在設(shè)計(jì)DSP視頻生成系統(tǒng)時(shí),,DSP的選擇該系統(tǒng)設(shè)計(jì)的關(guān)鍵,為此這里選用TMS320C6418型DSP,。以TMS320C6418為核心的圖像生成仿真系統(tǒng)的系統(tǒng)原理框圖,,如圖1所示。
1.2 系統(tǒng)工作原理
系統(tǒng)初始化時(shí)通過DSP將素材圖像送入存儲(chǔ)器SDRAM等待DSP處理,,再由FPGA產(chǎn)生的行同步,、場(chǎng)同步信號(hào)的控制下將處理后的圖像數(shù)據(jù)通過DsP的EDMA通道送入FPGA的RAM中,在FPGA產(chǎn)生復(fù)合同步信號(hào)和復(fù)合消隱信號(hào)的控制下圖像數(shù)據(jù)經(jīng)D/A轉(zhuǎn)換后,,合成為標(biāo)準(zhǔn)的模擬視頻信號(hào),。
1.3 基于DSP的系統(tǒng)硬件特性
DSP處理系統(tǒng)實(shí)現(xiàn)對(duì)圖像數(shù)據(jù)的處理,是整個(gè)系統(tǒng)的核心,。它由DSP器件TMS320C6418,、圖像存儲(chǔ)器SDRAM、程序存儲(chǔ)器Flash構(gòu)成,。
TMS320C6418通過外部存儲(chǔ)器接口(EMIF)與SDRAM,、Flash和FPGA連接,構(gòu)成典型的嵌入式DSP應(yīng)用系統(tǒng),。TMS320C6418是TI公司新推出的TMS320C64xx系列的一種,,主要特點(diǎn)為:片內(nèi)512K字節(jié)RAM,;操作速度高達(dá)600MHz;支持多種外部存儲(chǔ)器接口,,包括SRAM,,SDRAM,RAOM,,F(xiàn)IF-0,;增強(qiáng)的EDMA控制器,有64個(gè)EDMA通道,。
在實(shí)時(shí)圖像數(shù)字處理器中,,采用SDRAM存儲(chǔ)圖像數(shù)據(jù)有2個(gè)優(yōu)點(diǎn):一是速度高,,存取時(shí)間可達(dá)8 ns,;二是單片容量大,有利于減少圖像處理系統(tǒng)的體積,。
對(duì)于DSP處理系統(tǒng),,必須擴(kuò)充片外程序存儲(chǔ)器,這里選用的是Flash存儲(chǔ)器,。TMS320C6418的RAM(L2)容量達(dá)到512 KB,,而DSP系統(tǒng)的應(yīng)用程序通常不是特別大,因此,,在系統(tǒng)上電以后將使用的程序裝載到L2中,,這樣可以提高程序的訪問速度。
1.4 基于DSP的系統(tǒng)成像制導(dǎo)仿真圖像生成軟件
1)DSP初始化程序 完成上電復(fù)位以后的初始化工作,,主要包括對(duì)外部存儲(chǔ)器件SDRAM,、Flash的配置和初始化及將素材圖像數(shù)據(jù)搬入SDRA-M。
2)DSP系統(tǒng)圖像數(shù)據(jù)的傳輸程序 在圖像生成中存在大量的數(shù)據(jù)傳輸,,包括:目標(biāo)和背景數(shù)據(jù)傳輸,,以實(shí)現(xiàn)圖像數(shù)據(jù)的融合處理;SDRAM與DSP內(nèi)部RAM的數(shù)據(jù)傳輸,,以實(shí)現(xiàn)目標(biāo)提取的處理,;SDRAM與FPGA的RAM的數(shù)據(jù)傳輸,以實(shí)現(xiàn)視頻圖像的實(shí)時(shí)顯示,。
3)圖像處理程序 根據(jù)圖像的特點(diǎn)選擇合適的圖像處理算法,,提取目標(biāo),給控制端提供脫靶量,,以實(shí)現(xiàn)圖像的閉環(huán)跟蹤,。
4)制導(dǎo)控制程序 根據(jù)外部輸入的輸入條件,即跟蹤,、掃描等命令,,使其能夠模擬導(dǎo)引頭工作時(shí)真實(shí)場(chǎng)景的動(dòng)態(tài)變化,。
2 成像制導(dǎo)仿真圖像生成關(guān)鍵技術(shù)
2.1 背景和目標(biāo)的模型建立
目標(biāo)是指軍事武器作戰(zhàn)的對(duì)象物,而背景是除目標(biāo)之外的一切空間物質(zhì),。目標(biāo)與背景是相對(duì)的,,同一物體有時(shí)可以成為目標(biāo),有時(shí)也可以是背景,。對(duì)于成像制導(dǎo)而言,,根據(jù)目標(biāo)與背景所在地理位置高度或性質(zhì)的不同,可把目標(biāo)與背景分成3類:空中目標(biāo)與天空背景,、海面目標(biāo)與海洋背景,、地面目標(biāo)與地物背景。
背景圖像的生成可以使用形狀規(guī)則的矩形光柵圖像,,例如帶有天空和地面的*.bmp位圖圖像,。在某些特定的場(chǎng)景中還需要花、草,、樹,、汽車、房屋等不規(guī)則形狀的目標(biāo)光柵圖像,,例如要在已有的場(chǎng)景中生成一顆大樹,,如何才能透過樹葉和枝桿的縫隙看到后面的景物。這在DSP中沒有專門的函數(shù)來進(jìn)行處理,。但可采用以下方法實(shí)現(xiàn):
1)首先用3DMAX軟件生成所需要的花,、草、汽車等,,生成文件為*.BMP位圖文件格式,,用PHOTOSHOP軟件將感興趣的圖像將其對(duì)比度、亮度加以調(diào)整,。將其位圖圖像做成矩形,,便于DSP算法處理。
2)背景與目標(biāo)的融合,,確定目標(biāo)的位置后,,需要把背景和目標(biāo)融合起來。但是由于背景與目標(biāo)之間存在亮度差,,如果簡單地重疊,,就會(huì)出現(xiàn)明顯的縫隙。為了達(dá)到無縫融合,,把背景與目標(biāo)重合區(qū)域的邊緣按一定的加權(quán)值合成為新的邊緣,。

式中,Inew為合成的新的邊緣圖像,,I1和I2為目標(biāo)與背景重疊區(qū)域的邊緣圖像,,w為加權(quán)系數(shù),。
設(shè)重疊邊緣區(qū)域的寬度為d,那么拼接的圖像,,I1隨著向I2的過渡,,w由0→1,增量為1/d呈線性變化,。該算法實(shí)現(xiàn)了目標(biāo)與背景邊緣的均勻過渡,,達(dá)到很好圖像無縫融合的效果。
3)對(duì)生成的圖像進(jìn)行濾波處理,。
2.2 素材圖像數(shù)據(jù)的生成
各種各樣的背景圖像和目標(biāo)圖像存放在存儲(chǔ)器中,,這就要將所取得素材轉(zhuǎn)換成數(shù)字圖像然后通過燒寫程序?qū)⑦@些素材通過DSP燒寫到存儲(chǔ)器中。
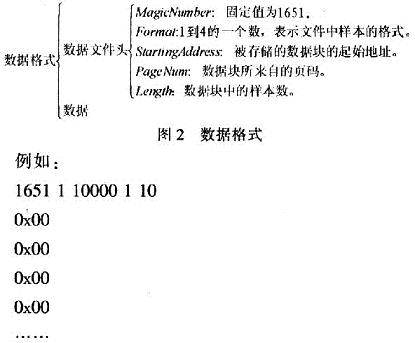
1)將素材用軟件轉(zhuǎn)換成TI CCStudio調(diào)試軟件能夠識(shí)別的數(shù)據(jù)格式,。具體格式如圖2所示,。
2)通過CCStudio的File一>Data一>Load菜單將素材數(shù)據(jù)裝入相應(yīng)的地址空間。
3)通過編寫的燒寫程序?qū)⑺夭臄?shù)據(jù)固化到存儲(chǔ)器相應(yīng)的地址空間,。
3 導(dǎo)引回路圖像的實(shí)時(shí)仿真
要真實(shí)地仿真作戰(zhàn)環(huán)境,,就必須考慮目標(biāo)的各種運(yùn)動(dòng)規(guī)律。描述目標(biāo)的運(yùn)動(dòng)可以有3種方法:1)目標(biāo)運(yùn)動(dòng),,導(dǎo)引頭框架不動(dòng);2)目標(biāo)不動(dòng),,導(dǎo)引頭框架運(yùn)動(dòng),;3)目標(biāo)和導(dǎo)引頭框架同時(shí)運(yùn)動(dòng)。
在人工捕獲目標(biāo)的導(dǎo)彈仿真回路中,,一般情況下目標(biāo)是固定的,,靠人工操作控制導(dǎo)彈搜索、跟蹤目標(biāo),,因此本文采用方法第2種方法(即目標(biāo)不動(dòng),,導(dǎo)引頭框架運(yùn)動(dòng))來進(jìn)行圖像仿真。仿真過程如圖3所示,。
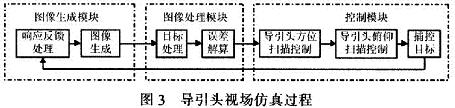
仿真圖像生成后將圖像送入圖像處理模塊,,圖像處理模塊運(yùn)用圖像處理和識(shí)別技術(shù)完成目標(biāo)的檢測(cè)、識(shí)別和跟蹤,,并根據(jù)目標(biāo)方位,,給出相應(yīng)的誤差信號(hào);控制模塊根據(jù)相應(yīng)的控制命令進(jìn)行導(dǎo)引頭的方位和俯仰掃描,,一旦發(fā)現(xiàn)目標(biāo)立即轉(zhuǎn)入跟蹤狀態(tài)進(jìn)行跟蹤,,同時(shí)計(jì)算導(dǎo)引頭的位置和姿態(tài)參數(shù);導(dǎo)引頭的調(diào)整結(jié)果作為反饋被送回仿真視場(chǎng)圖像生成模塊,,該模塊根據(jù)反饋信號(hào)計(jì)算生成下一幅圖像,。仿真的實(shí)際效果圖如圖4所示,。
4 結(jié)束語
介紹了基于DSP處理器的成像制導(dǎo)圖像生成仿真系統(tǒng),并在某導(dǎo)引頭仿真系統(tǒng)中得到應(yīng)用,,真實(shí)模擬出導(dǎo)引頭搜索,、捕獲目標(biāo)的全過程。該仿真系統(tǒng)可以對(duì)導(dǎo)引頭的目標(biāo)識(shí)別能力和制導(dǎo)能力給出判斷,,并由此改進(jìn)目標(biāo)識(shí)別系統(tǒng),,從而提高精確制導(dǎo)的能力。隨著精確制導(dǎo)武器系統(tǒng)的發(fā)展,,基于DSP的成像制導(dǎo)仿真必將取得越來越大的進(jìn)展,,發(fā)揮越來越重要的作用。
此內(nèi)容為AET網(wǎng)站原創(chuàng),,未經(jīng)授權(quán)禁止轉(zhuǎn)載,。