
單片機(jī)軟件實(shí)現(xiàn)是單片機(jī)系統(tǒng)應(yīng)用的重點(diǎn),,他是在硬件設(shè)計(jì)基礎(chǔ)上實(shí)現(xiàn)程序設(shè)計(jì)的重要環(huán)節(jié)。單片機(jī)程序設(shè)計(jì)一般包括以下幾個步驟:軟件規(guī)劃,、流程圖編制,、代碼編寫。由于單片機(jī)系統(tǒng)具有軟硬件緊密結(jié)合的特點(diǎn),,因此在基于某種單片機(jī)系統(tǒng)的軟件開發(fā)時,,應(yīng)充分了解該系統(tǒng)實(shí)現(xiàn)的硬件環(huán)境,同時也應(yīng)該在系統(tǒng)設(shè)計(jì)與硬件設(shè)計(jì)階段,,對軟件設(shè)計(jì)有一個大體的規(guī)劃,。因此,本文在介紹室內(nèi)機(jī)控制器功能的基礎(chǔ)上,,重點(diǎn)討論如何用軟件實(shí)現(xiàn)該室內(nèi)機(jī)的功能,。
1室內(nèi)機(jī)控制器的功能
室內(nèi)機(jī)控制器主要是驅(qū)動風(fēng)門步進(jìn)電機(jī),接收來自紅外遙控器設(shè)計(jì)的指令,,進(jìn)入到相應(yīng)的工作狀態(tài),,并顯示運(yùn)行狀態(tài)。
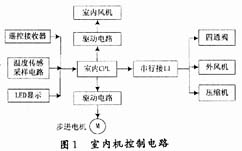
室內(nèi)機(jī)控制器包括以下幾個硬件電路模塊:室內(nèi)機(jī)處理器,,室內(nèi)機(jī)驅(qū)動電路,,風(fēng)門步進(jìn)電機(jī),顯示板電路(LED),紅外遙控接收/發(fā)送電路,,室內(nèi)機(jī)外裝置串行通信電路,,溫度傳感器電路。室內(nèi)機(jī)控制電路框圖如圖1所示,。
1.1室內(nèi)機(jī)CPU
從以上室內(nèi)機(jī)控制器包含的硬件電路模塊來看,要設(shè)計(jì)家用空調(diào)控制器在功能上要求具有2路溫度傳感器,,1個步進(jìn)電機(jī)控制接口,,1組PG調(diào)速風(fēng)機(jī)控制,10 個發(fā)光二極管溫度指示,,紅外遙控接收接口和室外機(jī)組控制接
口,。選擇Microchip公司的PIC16C74單片機(jī),可以滿足以上條件,,該單片機(jī)具有以下特點(diǎn):
(1) 獨(dú)立分離的數(shù)據(jù)總線和14 b指令總線的“哈佛”結(jié)構(gòu),,采用33條精簡指令集,指令執(zhí)行速度快,,效率高,。內(nèi)含4 kB程序存儲器和192 B數(shù)據(jù)存儲器,滿足設(shè)計(jì)要求。
(2) 內(nèi)置具有8路10 b A/D轉(zhuǎn)換,,簡化電路設(shè)計(jì),。
(3) 3個硬件定時器,便于控制器復(fù)雜的延時保護(hù),。
1.2PG電機(jī)
PG電機(jī)內(nèi)的霍爾傳感器主要是檢測電機(jī)的轉(zhuǎn)速并反饋到CPU中,,最終達(dá)到調(diào)節(jié)風(fēng)速的目的。在設(shè)計(jì)閉環(huán)風(fēng)機(jī)調(diào)速部分,,可以采用簡單的二階伺服環(huán)路控制模式,,在速度閉環(huán)的基礎(chǔ)上增加加速度閉環(huán)控制算法,解決風(fēng)機(jī)控制的風(fēng)速抖動問題,,使得PG電機(jī)運(yùn)轉(zhuǎn)平穩(wěn)性得到大幅度提高,。
2空調(diào)室內(nèi)機(jī)控制器軟件規(guī)劃
2.1軟件的總體設(shè)計(jì)
在進(jìn)行室內(nèi)機(jī)控制器軟件實(shí)現(xiàn)時,首先要進(jìn)行軟件設(shè)計(jì),,軟件設(shè)計(jì)主要基于模塊化設(shè)計(jì)思想,,將軟件分解成若干功能,通過主程序?qū)⒏鬈浖O(shè)計(jì)模塊有機(jī)地組織起來,。該室內(nèi)機(jī)控制器的軟件設(shè)計(jì)模塊主要包括:主程序,、紅外接收模塊、運(yùn)行模塊,、風(fēng)門步進(jìn)電機(jī)控制模塊,、PG風(fēng)機(jī)調(diào)速模塊、運(yùn)行模式模塊,、A/D轉(zhuǎn)換處理模塊,。同時在設(shè)計(jì)時應(yīng)考慮以下幾類中斷:
自動按鍵中斷、風(fēng)機(jī)速度中斷,,除此之外應(yīng)規(guī)劃設(shè)計(jì)2個定時器中斷:設(shè)置定時器0產(chǎn)生250ms定時中斷,,定時器1產(chǎn)生125 μs定時中斷。
2.2軟件的詳細(xì)設(shè)計(jì)
對室內(nèi)機(jī)控制器在總體上進(jìn)行了模塊功能的設(shè)計(jì)后,,應(yīng)對每一個模塊的實(shí)現(xiàn)進(jìn)行詳細(xì)設(shè)計(jì),,在這里以運(yùn)行模式模塊為例來討論該模塊的詳細(xì)設(shè)計(jì)過程。
空調(diào)室內(nèi)機(jī)運(yùn)行模式主要包括:自動運(yùn)行模式,、制冷運(yùn)行模式,、抽濕運(yùn)行模式、通風(fēng)運(yùn)行模式和制熱運(yùn)行模式,。以下主要從各運(yùn)行模式特點(diǎn),、各模式與主程序的流程圖規(guī)劃和運(yùn)行模式編程語言的選擇與編程實(shí)現(xiàn)等3個方面介紹如何開發(fā)一個復(fù)雜工程。
2.2.1空調(diào)室內(nèi)機(jī)各運(yùn)行模式的特點(diǎn)
(1) 自動運(yùn)行模式進(jìn)入自動模式,,LED顯示屏上自動標(biāo)志常亮,,5 s后選定工作模式,,5 s期間風(fēng)門、風(fēng)速,、溫度可調(diào),,空調(diào)根據(jù)最終設(shè)定溫度(默認(rèn)初始設(shè)定值24 ℃)與當(dāng)前室溫的差別,自動進(jìn)入制冷或制熱模式,,以維持設(shè)定溫度,,令室內(nèi)溫度為T,設(shè)定溫度為T0,,當(dāng)T≥T0時,,進(jìn)入制冷運(yùn)行;當(dāng)T
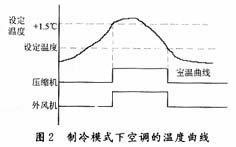
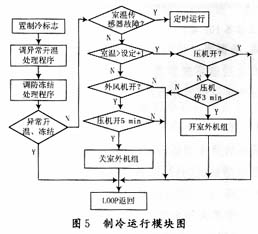
(2) 制冷運(yùn)行模式制冷運(yùn)行模式溫度設(shè)定范圍為16~30 ℃(初始值24 ℃),,當(dāng)T≥T0時,壓縮機(jī),、外風(fēng)機(jī)運(yùn)轉(zhuǎn),;當(dāng)T
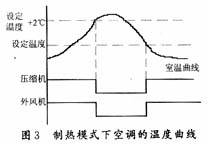
(3) 制熱運(yùn)行模式制熱運(yùn)行模式下溫度設(shè)定范圍為16~30 ℃(初始值24 ℃),,當(dāng)選定制熱運(yùn)行方式后,可按圖3所示運(yùn)行,,在制熱過程中風(fēng)速可任意選擇,,并在制 熱過程中考慮防冷風(fēng)控制、超負(fù)荷,、吹余熱等保護(hù)功能的設(shè)置,。
(4) 抽濕運(yùn)行模式當(dāng)選擇抽濕方式運(yùn)轉(zhuǎn),,空調(diào)器將以制冷方式運(yùn)轉(zhuǎn)到室內(nèi)溫度達(dá)到遙控器設(shè)定的溫度為止,然后轉(zhuǎn)入抽濕方式,,開3 min再停3 min,,如此循環(huán)進(jìn)行。停機(jī)時,,內(nèi)風(fēng)機(jī)延時30 s停止,。在抽濕運(yùn)轉(zhuǎn)時,溫度可調(diào),,溫度范圍設(shè)定在16~30 ℃,。
(5) 通風(fēng)運(yùn)行模式在通風(fēng)運(yùn)行模式下,室外機(jī)組停止運(yùn)轉(zhuǎn),,室內(nèi)風(fēng)機(jī)可選擇自動,、高、中,、低任意一檔風(fēng)速,。當(dāng)Δt>4 ℃時,運(yùn)行高風(fēng),,當(dāng)Δt<0 ℃時,,運(yùn)行低風(fēng)。
2.2.2空調(diào)各運(yùn)行模式的流程圖設(shè)計(jì)
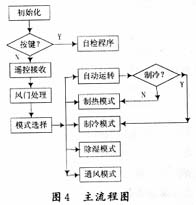
面對復(fù)雜系統(tǒng)的實(shí)現(xiàn),,在程序?qū)崿F(xiàn)之前,,應(yīng)依賴于流程圖使復(fù)雜的問題變得清晰易于理解,因此在分析了各運(yùn)行模式的特點(diǎn)后,,利用結(jié)構(gòu)化分析方法將各運(yùn)行模式模塊化,,然后再在模塊化的基礎(chǔ)上具體繪制各模塊的流程圖,將各功能模塊的功能進(jìn)行進(jìn)一步明確,。以下給出了主程序的流程圖和制冷運(yùn)行模式的流程圖,,如圖4、圖5所示,。
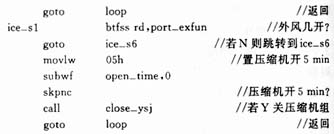
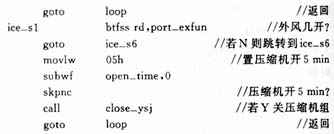
2.2.3運(yùn)行模式編程實(shí)現(xiàn)
各模塊的流程圖畫好后,,下一步的工作就是要用某種編程語言實(shí)現(xiàn)各功能模塊。在用編程語言實(shí)現(xiàn)時,,選擇了Microchip公司提供的MPLAB(4.00)集成開發(fā)環(huán)境,。該開發(fā)環(huán)境是Microchip公司為其PIC系列單片機(jī)專門設(shè)計(jì)的開發(fā)環(huán)境,該平臺包括編輯器,、編譯環(huán)境,、軟件仿真、硬件仿真,,同時該環(huán)境采用Windows界面,,開發(fā)設(shè)計(jì)非常方便,。由于篇幅的原因這里只給出制冷運(yùn)行模塊的編程實(shí)現(xiàn)。

3結(jié)語
在基于PIC16C74單片機(jī)空調(diào)室內(nèi)機(jī)軟件的實(shí)現(xiàn)時,,對該
系統(tǒng)的系統(tǒng)設(shè)計(jì)與硬件設(shè)計(jì)進(jìn)行了充分的了解,,并在此基礎(chǔ)上運(yùn)用結(jié)構(gòu)化程序設(shè)計(jì)的方法進(jìn)行功能分解與模塊設(shè)計(jì),使得在編程時能達(dá)到事半功倍的效果,,且有利于日后對程序的仿真和調(diào)試,。
參考文獻(xiàn)
[1]何利民.MCS51單片機(jī)應(yīng)用系統(tǒng)設(shè)計(jì)[M].北京:北京航空航天大學(xué)出版社,,1994.
?。?]史國生.交直流調(diào)速系統(tǒng)[M].北京:化學(xué)工業(yè)出版社,2002.
?。?]李英順,,倫淑嫻.模糊控制PID測控儀[J].儀表技術(shù)與傳感器,2003.
?。?]胡漢才.單片機(jī)原理機(jī)接口技術(shù)[M].北京:清華大學(xué)出版社,,1999.