
引言
異步串行通信是現(xiàn)代電子系統(tǒng)中最常用的數(shù)據(jù)信息傳輸方式之一,一般情況下,為了能夠正確地對異步串行數(shù)據(jù)進(jìn)行發(fā)送和接收,就必須使其接收與發(fā)送的碼元同步,位同步時鐘信號不僅可用來對輸入碼元進(jìn)行檢測以保證收發(fā)同步,而且在對接收的數(shù)字碼元進(jìn)行各種處理等過程中,也可以為系統(tǒng)提供一個基準(zhǔn)的同步時鐘。
本文介紹的位同步時鐘的提取方案,原理簡單且同步速度較快。整個系統(tǒng)采用VerilogHDL語言編寫,并可以在CPLD上實現(xiàn)。
位同步時鐘的提取原理
本系統(tǒng)由一個跳變沿捕捉模塊、一個狀態(tài)寄存器和一個可控計數(shù)器共三部分組成,整個如圖1所示,其中data_in是輸入系統(tǒng)的串行信號,clock是頻率為串行信號碼元速率2N倍的高精度時鐘信號,pulse_out是系統(tǒng)產(chǎn)生的與輸入串行信號每個碼元位同步的脈沖信號,即位同步時鐘。
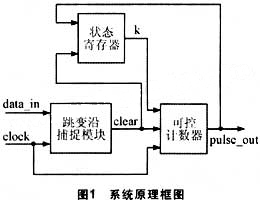
跳變沿捕捉模塊的輸入也就是整個的輸入data_in和clock。當(dāng)data_in發(fā)生跳變時,無論是上升沿或是下降沿,捕捉模塊都將捕捉所發(fā)生的這次跳變,并產(chǎn)生一個脈沖信號clear,這個clear信號所反應(yīng)的就是輸入信號發(fā)生跳變的時刻。然后以它為基準(zhǔn),
就可以有效地提取輸入串行信號的同步時鐘。
狀態(tài)寄存器有兩個輸入,分別接跳變沿捕捉模塊的輸出clear和可控計數(shù)器的輸出pulse_out,當(dāng)clear信號的上升沿到來時,此狀態(tài)寄存器的輸出k被置1,之后在pulse_out和k信號本身的控制下,k在pulse_out和k信號上產(chǎn)生一個脈沖之后被置0,這個k為一般連接到可控計數(shù)器的控制端。
可控計數(shù)器是模可變的計數(shù)器,在k信號的控制下可以對clock信號進(jìn)行模為N-2或2N的計數(shù),其三個輸入分別接跳變沿捕捉模塊的輸出clear、狀態(tài)寄存器的輸出k和時鐘clock。其中clear信號可以對計數(shù)器進(jìn)行異步清零,k信號可選擇計數(shù)的模,當(dāng)k=1時,計數(shù)器的模為N-2,計數(shù)滿N-2后即產(chǎn)生輸出脈沖pulse_out,當(dāng)k=0時,計數(shù)器的模為2N,計數(shù)滿2N時,產(chǎn)生輸出脈沖pulse_out。
整個系統(tǒng)工作時,當(dāng)輸入信號data_in發(fā)生跳變時,跳變沿捕捉將可以捕捉到這次跳變,并產(chǎn)生一個脈沖信號clear,此clear信號可以將可控計數(shù)器的計數(shù)值清零,同時將狀態(tài)寄存器的輸出k置1,并送入可控計數(shù)器中,以使計數(shù)器進(jìn)行模塊為N-2的計數(shù),待計滿后,便可輸出脈沖信號pulse_out,此信號一方面可作為整個系統(tǒng)輸出的位同步時鐘信號,另一方面,它也被接進(jìn)了狀態(tài)寄存器,以控制其輸出k在計數(shù)器完成N-2的計數(shù)后就變?yōu)?,并在沒有clear脈沖信號時使K保持為0,從而使可控計數(shù)器的模保持為2N,直到輸入信號data_in出現(xiàn)新的跳變沿并產(chǎn)生新的clear脈沖信號,由以上原理可見,在輸入信號為連“1”或連“0”的情況下,只要系統(tǒng)使用的時鐘信號足夠精確,就可以保證在一定時間里輸出滿足要求的位同步時鐘,而在輸入信號發(fā)生跳變時,系統(tǒng)又會捕捉下這個跳變沿并以此為基準(zhǔn)輸出位同步時鐘。
位同步時鐘的提取
本系統(tǒng)包括三個部分,一是采用VerilogHDL語言編寫程序,第二步再將每個部分作為一個模塊(module)來編寫,最后通過元件例化的方法將三個模塊連接起來,以完成這個整個系統(tǒng)的設(shè)計。
下面是跳變沿捕捉模塊的部分程序,其中Int0為串行輸入信號,PCclk為輸入系統(tǒng)的高精度時鐘信號,本模塊的輸出Pcout對應(yīng)于圖1中的clear信號,它同時又接入狀態(tài)寄存器模塊的Psclr和可控計數(shù)器模塊的clr。其仿真結(jié)構(gòu)如圖2所示。

跳變沿捕捉模塊的部分程序如下:
module PcheckCapture (PCout,Int0,PCclk);
……
reg PCtemp1,PCtemp2;
always@(posedge PCclk) begin
PCtemp1<=Int0;
PCtemp2<=PCtemp1;
end
assign PCout="PCtemp1"^PCtemp2;
……
狀態(tài)寄存器模塊的部分程序如下,其中輸入信號Psclr來自跳變沿捕捉模塊,另一個輸入信號Pss則來自可控計數(shù)器的輸出s對應(yīng)圖1中的pulse_out,輸出信號Psout對應(yīng)圖1中的k;
module PcheckSreg (Psout,Pss,Psclr);
……
wire Pstemp;
assign Pstemp=~(Pss&Psout);
always@(posedge Pstemp or posedge Psclr) begin
if(Psclr==1b1)Psout<=1;
else Psout<=~Psout;
end
……
下面是可控計數(shù)器模塊的部分程序,其中三個輸入信號k、clr、clk分別對應(yīng)于圖1中的k、clear、clock,輸出信號s對應(yīng)于圖1中的輸出信號pulse_out;
module PcheckCoumter (s,k,clr,clk);
……
always@(posedge clk or posedge clr)
begin
if(clr==1)begin
s=0;
cnt=0;
end
else begin
if(k==0) begin
if(cnt==2N-1)begin
cnt=0;
s=1;
end;
else begin
cnt=cnt+1;
s=0;
end
end
else begin
if(cnt==N-2)begin cnt="0";
s=1;
end
else begin
cnt=cnt+1;
s=0;
end
……
…
在頂層模塊中,應(yīng)對三個模塊進(jìn)行例化,并在導(dǎo)線相連接,以構(gòu)成一個完整的系統(tǒng),此模塊的程序如下:
modulePcheckTop (PTout,PTint,PTclk);
inout PTout;
input PTint,PTclk;
PcheckCapture a (clear,PTint,PTclk);
PcheckCounter b (PTout,k,clear,PTclk);
PcheckSreg
c(k,PTout,clear);
endmodule
圖3為整個系統(tǒng)的仿真結(jié)果。

結(jié)束語
本位同步時鐘提取方案已在CPLD器件上進(jìn)行了仿真實現(xiàn),通過以上的分析可知,本位同步時鐘的提取方案具有結(jié)構(gòu)簡單、節(jié)省硬件資源、同步建立時間短等優(yōu)點,在輸入信號有一次跳變后,系統(tǒng)出現(xiàn)連“1”連“0”,或信號中斷時,此系統(tǒng)仍然能夠輸出位同步時鐘脈沖,此后,只要輸入信號恢復(fù)并產(chǎn)生新的跳變沿,系統(tǒng)仍可以調(diào)整此位同步時鐘脈沖輸出而重新同步,此系統(tǒng)中輸入的時鐘信號頻率相對碼元速率越高,同步時鐘的位置就越精確,而當(dāng)輸入碼元速率改變時,只要改變本系統(tǒng)中的N值系統(tǒng)就可重新正常工作。