
摘 要: 介紹了一種專(zhuān)門(mén)為旋挖鉆機(jī)的垂直起豎和井深測(cè)量而設(shè)計(jì)的控制系統(tǒng)" title="控制系統(tǒng)">控制系統(tǒng)的原理,、實(shí)現(xiàn)方法和軟硬件構(gòu)成等,。該系統(tǒng)基于高性能八位微處理器Mega128而設(shè)計(jì),集成了垂直度檢測(cè),、井深測(cè)量,、垂直度控制和操作指示等功能,。
關(guān)鍵詞: 旋挖鉆機(jī) 電液比例控制 Mega128 PID PWM
旋挖鉆機(jī)是一種用于建筑基礎(chǔ)工程中成孔作業(yè)的施工機(jī)械。它是以履帶為支承的回轉(zhuǎn)斗式旋挖鉆孔機(jī)械,,其工作裝置由動(dòng)力頭,、伸縮鉆桿、加壓裝置和液壓系統(tǒng)等組成,。
旋挖鉆機(jī)的控制屬于一般工業(yè)自動(dòng)化應(yīng)用領(lǐng)域,,它要求一種廉價(jià)、節(jié)能,、維護(hù)方便,、適用于大功率控制及具有一定控制精度的控制技術(shù),所以采用電液比例控制,。它能夠接受模擬信號(hào)和數(shù)字信號(hào),,使輸出的流量或壓力連續(xù)成比例地受到控制。電液比例控制系統(tǒng)[1]有數(shù)字控制系統(tǒng),、脈寬調(diào)節(jié)(PWM)控制系統(tǒng)等,。
旋挖鉆機(jī)鉆桅的垂直度直接影響到所鉆孔的質(zhì)量,對(duì)于提高工程機(jī)械作業(yè)效率有著很重要的意義,,保證其在要求的范圍內(nèi)是控制系統(tǒng)應(yīng)完成的主要任務(wù),。所以旋挖鉆機(jī)的控制方案為:根據(jù)操作員的指令,利用電液比例控制系統(tǒng)控制液壓缸運(yùn)動(dòng),,實(shí)現(xiàn)鉆具安全平穩(wěn)起豎,,進(jìn)而保證旋挖鉆機(jī)鉆桅的垂直度在要求范圍內(nèi)。同時(shí),,精確的井深測(cè)量也能極大提高工作效率,。所以,,它也是控制系統(tǒng)應(yīng)完成的任務(wù)。
目前,,國(guó)內(nèi)外旋挖鉆控制系統(tǒng)的特點(diǎn)是其控制器的所有控制規(guī)律處理,、輸入/輸出信號(hào)波形處理和功率放大等都由模擬電路進(jìn)行,因此迫切需要改進(jìn),。而旋挖鉆機(jī)控制的數(shù)字化正是目前提高旋挖鉆機(jī)工作性能的必然要求和發(fā)展趨勢(shì),。
1 計(jì)算機(jī)控制系統(tǒng)方案
控制系統(tǒng)方案如圖1所示。系統(tǒng)監(jiān)測(cè)傾角傳感器信號(hào),、比例閥反饋信號(hào),、液壓缸位置傳感器信號(hào)和操縱桿發(fā)來(lái)的指令,根據(jù)控制算法" title="控制算法">控制算法產(chǎn)生控制數(shù)據(jù),,控制數(shù)據(jù)經(jīng)過(guò)轉(zhuǎn)換算法產(chǎn)生控制量(PWM信號(hào)),,并通過(guò)驅(qū)動(dòng)電路控制電液比例閥,采用反饋控制技術(shù)實(shí)現(xiàn)兩個(gè)液壓通道的精確同步控制,,克服了鉆具起豎過(guò)程中由于兩個(gè)比例方向閥參數(shù)不一致而造成的歪斜,。

旋挖鉆機(jī)的正常工作還需要許多輔助系統(tǒng),在本控制系統(tǒng)中包含有井深測(cè)量控制系統(tǒng),、故障檢測(cè)系統(tǒng)和保護(hù)控制系統(tǒng),。為滿足不同旋挖鉆機(jī)的控制需要,本系統(tǒng)還具有控制參數(shù)設(shè)置和旋挖鉆機(jī)工作過(guò)程參數(shù)顯示等功能,。
2 主要技術(shù)指標(biāo)
·垂直度(圓周)誤差<0.2°,,也就是在兩個(gè)正交軸上,傾角誤差的平方和的平方根小于0.2°,;井深測(cè)量誤差可控制在小于10cm的范圍內(nèi),。
·提供穩(wěn)定的±5V和±10V電壓接口,以滿足操縱桿和傳感器的用電要求,。
·提供八路開(kāi)關(guān)量輸出信號(hào),,用于系統(tǒng)保護(hù)、告警和狀態(tài)指示,。
·可控制兩個(gè)三位四通比例換向閥,,驅(qū)動(dòng)電流大于2A。
·提供RS232接口,,用于系統(tǒng)參數(shù)設(shè)定,、故障檢測(cè),并提供CAN總線接口,,用于系統(tǒng)組網(wǎng),。
3 系統(tǒng)硬件配置
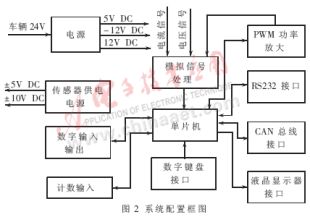
該控制系統(tǒng)主要由電源、傳感器供電電源" title="供電電源">供電電源、模擬信號(hào)處理,、單片機(jī),、RS232接口、CAN總線接口,、PWM功率放大,、數(shù)字輸入輸出、計(jì)數(shù)輸入,、液晶顯示器接口,、數(shù)字鍵盤(pán)接口等部分組成,其配置框圖如圖2所示,。
3.1 電源部分
電源部分結(jié)構(gòu)圖如圖3所示,包括濾波,、電源反接保護(hù),、過(guò)壓狀態(tài)輸出、欠壓狀態(tài)輸出,、+5V穩(wěn)壓輸出,、±12V穩(wěn)壓輸出、速熔保險(xiǎn)等電路,。應(yīng)選用開(kāi)關(guān)型穩(wěn)壓模塊,,以實(shí)現(xiàn)高輸入電壓下的低功耗穩(wěn)壓輸出。本系統(tǒng)使用LM2575HVT-5.0和LM2575HVT-12.0電源模塊,。電壓的輸出要有順序,,首先輸出+5V電壓,然后在系統(tǒng)控制下輸出±12V電壓,。
電源反接保護(hù)電路使用整流電橋,。PWM功率放大器的電源要經(jīng)過(guò)濾波器、速熔保險(xiǎn)和電源反接保護(hù)電路,。過(guò)壓和欠壓狀態(tài)輸出使用比較器實(shí)現(xiàn),,考慮了暫態(tài)問(wèn)題。3.2 傳感器供電電源
傳感器的供電由以下幾部分組成:傾角傳感器直接使用電源供給的+12V穩(wěn)壓直流電,;霍耳傳感器" title="霍耳傳感器">霍耳傳感器直接使用+5V電源提供的穩(wěn)壓直流電,;操縱桿和液壓缸位置傳感器使用的是高穩(wěn)定度的±5V和±10V電源。因此,,傳感器供電電源主要為由基準(zhǔn)電源和運(yùn)算放大器組成的高穩(wěn)定度的±5V和±10V電源,。本系統(tǒng)中的運(yùn)算放大器選用低噪聲、高精度的TS524I運(yùn)算放大器,。
3.3 模擬信號(hào)處理部分
模擬信號(hào)經(jīng)本電路處理后,,送入單片機(jī)的A/D" title="A/D">A/D轉(zhuǎn)換器和數(shù)字輸入端。為提高單片機(jī)系統(tǒng)端口的使用效率,本系統(tǒng)采用模擬開(kāi)關(guān)(CD4053B)對(duì)比例方向閥反饋信號(hào)和單片機(jī)PWM輸出信號(hào)進(jìn)行切換,,以減少A/D轉(zhuǎn)換器輸入端口和PWM輸出端口的開(kāi)銷(xiāo),。其主要組成框圖如圖4所示。

3.4 PWM功率放大器
PWM功率放大器是驅(qū)動(dòng)電液比例方向閥的重要部件,,為保障其可靠工作,,又具備完善的保護(hù)措施,在設(shè)計(jì)中采用一種專(zhuān)用的PWM功率放大模塊BTS707,。該模塊不僅具有兩路PWM輸出來(lái)驅(qū)動(dòng)兩個(gè)三位四通比例換向閥,,而且具有完善的保護(hù)功能和斷路檢測(cè)功能,可以及時(shí)發(fā)現(xiàn)電磁閥線圈故障,,以便及時(shí)采取緊急處理措施,。取樣電阻引回的反饋信號(hào)用于構(gòu)成串聯(lián)負(fù)反饋回路,以穩(wěn)定通過(guò)電磁閥線圈的電流,,避免線圈溫度變化造成的驅(qū)動(dòng)電流波動(dòng),。
3.5 CAN總線接口
目前集成有CAN總線接口的單片機(jī)很多,一般均集成有1~4個(gè)CAN控制器,,但這些芯片成本太高,,本系統(tǒng)采用獨(dú)立的CAN控制器SJA1000并配合PCA82C250實(shí)現(xiàn)CAN2.0接口功能,其電路原理圖見(jiàn)圖5,??紤]到抗干擾能力的需要,圖中的VB5是由+5V隔離電源提供的,。

3.6 RS232接口
該接口的用途主要是提供人機(jī)接口,,實(shí)現(xiàn)參數(shù)設(shè)定、故障檢測(cè)等功能,??芍苯永脝纹瑱C(jī)的UART口,配以RS232電平轉(zhuǎn)換芯片,,方便地構(gòu)成RS232接口,。為保證系統(tǒng)產(chǎn)生準(zhǔn)確的常用波特率,需要精心選擇單片機(jī)的時(shí)鐘頻率,。RS232電平轉(zhuǎn)換電路采用MAX232A芯片[4],。
3.7 液晶圖形顯示器接口
液晶顯示器采用青云儀器廠生產(chǎn)的LCM320240ZK型帶漢字庫(kù)的液晶模塊,并配以照明電源,、對(duì)比度調(diào)整電路等,。為了提高控制器的工作效率和降低編程難度,并考慮到現(xiàn)場(chǎng)數(shù)據(jù)傳輸距離的限制,,本系統(tǒng)使用一個(gè)專(zhuān)門(mén)的微處理器控制LCD,。兩塊處理器之間的通訊通過(guò)SPI串行通訊接口實(shí)現(xiàn),。
3.8 數(shù)字鍵盤(pán)接口
數(shù)字鍵盤(pán)接口用于控制系統(tǒng)進(jìn)入不同工作狀態(tài),為簡(jiǎn)化設(shè)計(jì),,同時(shí)充分利用單片機(jī)提供的I2C兼容接口,,該數(shù)字鍵盤(pán)采用ZLG7290芯片進(jìn)行設(shè)計(jì),各功能鍵及狀態(tài)指示均在該芯片控制下,。利用好ZLG7290提供的中斷信號(hào),,可提高系統(tǒng)響應(yīng)速度,降低編程難度,。
3.9 單片機(jī),、數(shù)字輸入輸出接口及計(jì)數(shù)器接口
單片機(jī)采用ATMEL公司的MEGA128芯片,針對(duì)本系統(tǒng)中的應(yīng)用,,它有以下優(yōu)點(diǎn):
(1) 采用了先進(jìn)的RISC結(jié)構(gòu),,工作于16MHz時(shí)性能高達(dá)16MIPS。
(2) 具有八路10位ADC,最高分辨率時(shí)采樣率高達(dá)15kSPS,。
(3) 可提供兩路8位PWM控制信號(hào)和六路分辨率可編程的PWM控制信號(hào),。
(4) 豐富的定時(shí)器資源,具有四個(gè)硬件定時(shí)器,。
(5) 提供I2C總線控制模塊、兩個(gè)UART口和SPI串行接口[2],。
在系統(tǒng)設(shè)計(jì)上,,考慮了ISP編程接口。在初期設(shè)計(jì)的系統(tǒng)中,,為了系統(tǒng)調(diào)試方便,,采用了JTAG調(diào)試接口。
數(shù)字輸入輸出接口直接利用單片機(jī)的I/O口實(shí)現(xiàn),,計(jì)數(shù)器接口接收安裝在隨鉆細(xì)鋼絲繩滑輪上的霍耳傳感器的脈沖信號(hào),,根據(jù)該信號(hào)利用滑輪的轉(zhuǎn)數(shù)來(lái)計(jì)算井深,這里直接利用單片機(jī)的計(jì)數(shù)功能,。
4 控制系統(tǒng)軟件
整個(gè)控制器,、傳感器和液晶管理控制器所使用的微控制器都是工業(yè)級(jí)的。為開(kāi)發(fā)方便,,使用同一系列不同配置的微控制器,,所有程序開(kāi)發(fā)都使用C語(yǔ)言進(jìn)行,開(kāi)發(fā)軟件使用ICC AVR C6.28 軟件包,,調(diào)試器使用ATMEL公司的JTAGE ICE,,調(diào)試環(huán)境使用AVR Studio 4.10。
根據(jù)控制系統(tǒng)及比例方向閥的特點(diǎn)和需求進(jìn)行分析可知,,系統(tǒng)軟件需要完成的任務(wù)包括:數(shù)據(jù)檢測(cè)(包括A/D轉(zhuǎn)換,、垂直度和位置指令脈寬測(cè)量等),、鍵盤(pán)掃描、LCD顯示,、控制算法和PWM輸出,、參數(shù)設(shè)定等。這些功能的實(shí)現(xiàn)需由mega128的下列資源來(lái)實(shí)現(xiàn):通用I/O,、 ADC,、T0~T3定時(shí)器、中斷系統(tǒng)等,。
由于管理LCD顯示的是單獨(dú)的微控制器,,所以只需將液晶顯示模塊所用功能編寫(xiě)成例程,控制器只發(fā)送控制命令,,液晶控制器接收命令后對(duì)顯示模塊進(jìn)行具體控制即可,。這里只介紹主控制器的軟件實(shí)現(xiàn)。
4.1 主程序
主程序首先要實(shí)現(xiàn)系統(tǒng)初始化,,包括端口初始化,、定時(shí)器初始化、中斷設(shè)置等,。
主程序處于循環(huán)狀態(tài),,主要完成參數(shù)檢測(cè)和向LCD控制器發(fā)送顯示狀態(tài)命令等,直到發(fā)出關(guān)閉指令為止,。
4.2 中斷控制
控制軟件要實(shí)現(xiàn)多個(gè)任務(wù),。對(duì)各個(gè)任務(wù)的調(diào)度和管理以及重要任務(wù)的實(shí)時(shí)執(zhí)行,就需要對(duì)各個(gè)中斷精確規(guī)劃和協(xié)調(diào),。
控制軟件中共用到定時(shí)器中斷,、外部中斷、UART0中斷,、I2C總線中斷,、SPI中斷、A/D轉(zhuǎn)換完成中斷等中斷,。其功能如下:
(1)T0定時(shí)器溢出中斷用于實(shí)現(xiàn)采樣周期定時(shí),。
(2)T2定時(shí)器溢出中斷用于對(duì)測(cè)量井深的霍耳傳感器進(jìn)行計(jì)數(shù)溢出中斷。
(3)外部中斷用于實(shí)現(xiàn)轉(zhuǎn)向的檢測(cè)和操縱桿鎖定信號(hào)檢測(cè),。
(4)A/D 轉(zhuǎn)換完成中斷用于操縱桿指令和垂直度的轉(zhuǎn)換,。
(5)UART0中斷用于控制系統(tǒng),使之通過(guò)串口與PC機(jī)進(jìn)行數(shù)據(jù)交換,。
(6)I2C總線中斷用于通過(guò)中斷實(shí)現(xiàn)總線協(xié)議,,掃描鍵盤(pán)并完成數(shù)據(jù)傳送。
(7) SPI中斷用于主控制器向LCD控制器發(fā)送顯示命令,。
并不是每個(gè)中斷都自始至終發(fā)揮作用,,而是在不同階段,,有些中斷使能,其余禁止,,且同一中斷在旋挖鉆機(jī)工作的不同階段,其優(yōu)先級(jí)也會(huì)有所不同,。通過(guò)靈活的中斷設(shè)置與協(xié)調(diào),可實(shí)現(xiàn)實(shí)時(shí)任務(wù)和非實(shí)時(shí)任務(wù)的調(diào)度管理,。
4.3 控制規(guī)律設(shè)計(jì)
為了迅速,、穩(wěn)定、可靠地完成旋挖鉆機(jī)垂直起豎控制,,整個(gè)控制過(guò)程分為手動(dòng)控制和自動(dòng)搜尋控制,。
4.3.1 手動(dòng)控制
手動(dòng)控制采用開(kāi)環(huán)控制使驅(qū)動(dòng)旋挖鉆機(jī)的兩個(gè)液壓缸在操縱員的控制下滿足如下三種不同工作要求:當(dāng)操縱桿只有俯仰指令而無(wú)滾轉(zhuǎn)指令時(shí),其中一個(gè)液壓缸的運(yùn)動(dòng)跟隨另一個(gè)液壓缸的運(yùn)動(dòng),;當(dāng)操縱桿只有滾轉(zhuǎn)指令而無(wú)俯仰指令時(shí),,兩個(gè)液壓缸作差動(dòng)運(yùn)動(dòng);當(dāng)操縱桿既有俯仰指令又有滾轉(zhuǎn)指令時(shí),,則兩個(gè)液壓缸的運(yùn)動(dòng)是上述兩個(gè)運(yùn)動(dòng)的合成運(yùn)動(dòng),。
4.3.2 自動(dòng)控制
當(dāng)手工操作鉆桅進(jìn)入自動(dòng)搜尋區(qū)域時(shí),則按下操縱桿上的自動(dòng)搜尋按鈕,,單片機(jī)系統(tǒng)便斷開(kāi)操縱桿指令,,利用角位置傳感器信號(hào)控制液壓缸運(yùn)動(dòng),并按正交搜索策略搜索,。整個(gè)控制在T0的中斷中實(shí)現(xiàn),。程序流程圖見(jiàn)圖6。

?

4.4 PID 控制算法
為了方便更改PID控制參數(shù),,加快調(diào)試參數(shù)的效率,在進(jìn)入閉環(huán)控制后,,通過(guò)外部按鍵進(jìn)入?yún)?shù)設(shè)定狀態(tài),,此時(shí)暫時(shí)退出閉環(huán)控制;然后通過(guò)按鍵分別設(shè)置Kp,、Ki,、Kd等參數(shù),當(dāng)新的參數(shù)投入使用后,,重新進(jìn)入閉環(huán)工作狀態(tài),。PID控制算法程序流程圖見(jiàn)圖7。
參考文獻(xiàn)
1黎啟柏.電液比例控制與數(shù)字控制系統(tǒng).北京:機(jī)械工業(yè)出版社,,1997
2丁化成,耿德根,力君凱.AVR單片機(jī)應(yīng)用設(shè)計(jì).北京:北京航空航天大學(xué)出版社,,2002
3 沈 文, Eagle lee,, 詹衛(wèi)前. AVR單片機(jī)C語(yǔ)言開(kāi)發(fā)入門(mén)指導(dǎo).北京:清華大學(xué)出版社,2003
4 求是科技.單片機(jī)典型模塊設(shè)計(jì)實(shí)例導(dǎo)航.北京:人民郵電出版社,,2004