
摘? 要: 對(duì)實(shí)施被動(dòng)無源測(cè)向定位的主要工具之一的相位干涉儀進(jìn)行了較為詳細(xì)和系統(tǒng)的研究,給出了一維相位干涉儀的基本關(guān)系式,分析了五通道相位干涉儀測(cè)向定位算法及其性能指標(biāo),對(duì)解相位模糊問題進(jìn)行了探討。最后,在高速浮點(diǎn)信號(hào)處理" title="信號(hào)處理">信號(hào)處理器" title="數(shù)字信號(hào)處理器" title="數(shù)字信號(hào)處理器">數(shù)字信號(hào)處理器">數(shù)字信號(hào)處理器TMS320C6711系統(tǒng)上實(shí)現(xiàn)了五通道相位干涉儀測(cè)向定位算法,達(dá)到了性能指標(biāo)及實(shí)時(shí)實(shí)現(xiàn)。
關(guān)鍵詞: 相位干涉儀? 測(cè)向定位? 相位模糊? 定位誤差? 實(shí)時(shí)處理
相位干涉儀測(cè)向技術(shù)廣泛應(yīng)用于天文、雷達(dá)、聲納等領(lǐng)域。將干涉儀原理用于無線電測(cè)向始于上世紀(jì)五十年代和六十年代,隨著數(shù)字信號(hào)處理器的出現(xiàn),通過數(shù)字信號(hào)處理器來實(shí)現(xiàn)高精度實(shí)時(shí)測(cè)向成為可能。
本文在對(duì)一維和二維相位干涉儀進(jìn)行研究的基礎(chǔ)上給出了五通道相位干涉儀的基本關(guān)系式,分析了測(cè)向精度,并對(duì)解相位模糊問題和信道校正問題進(jìn)行了探討。采用多基線五元圓形天線陣" title="天線陣">天線陣列為模型,由天線陣列接收到的信號(hào)求解出五元天線陣列的互相關(guān)信號(hào),并由此提取測(cè)向所需的方位信息。本文以五通道相位干涉儀硬件實(shí)現(xiàn)為目標(biāo),采用高速浮點(diǎn)數(shù)字信號(hào)處理芯片TMS320C6711進(jìn)行測(cè)向處理。
1 相位干涉儀測(cè)向原理
1.1? 一維相位干涉儀測(cè)向原理
圖1所示為一個(gè)最簡單的一維雙陣元" title="陣元">陣元干涉儀模型。圖中,間隔為d(d稱為基線)的兩根天線A1和A2所接收的遠(yuǎn)場(chǎng)輻射信號(hào)之間的相位差為:

?
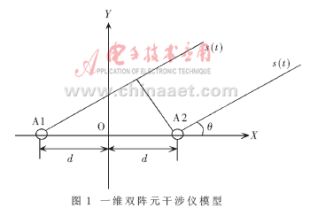
式(1)中,λ為接收電磁波的波長。因此,只要測(cè)量出φ,就能算出輻射源的到達(dá)方向θ:

1.2 測(cè)向誤差的分析
在實(shí)際系統(tǒng)中,兩根天線A1和A2接收的信號(hào)為:
?? 
其中,ni代表對(duì)應(yīng)陣元i接收的噪聲,兩陣元的噪聲統(tǒng)計(jì)相互獨(dú)立,且與信號(hào)統(tǒng)計(jì)獨(dú)立。
兩個(gè)陣元接收信號(hào)的互相關(guān)為:

式中,E代表數(shù)學(xué)期望運(yùn)算,“*”代表復(fù)共軛運(yùn)算,Ps代表信號(hào)功率,相關(guān)以后噪聲得到抑制。
由(4)式有:

式中,arccos表示反余弦函數(shù),arg代表復(fù)數(shù)取幅角運(yùn)算,區(qū)間為[-π,π]。k為整數(shù),且滿足:

在(6)式中,當(dāng)d/λ>0.5時(shí),k的取值不唯一,θ有多個(gè)解,由此產(chǎn)生測(cè)向模糊。
對(duì)(5)式求導(dǎo),有:
??? 
由(7)式可以得出以下結(jié)論:sinθ越大,即方位角" title="方位角">方位角與干涉儀法線方向的夾角越小,測(cè)向精度越高;反之,測(cè)向精度降低,直至測(cè)向無效。當(dāng)θ=±90°(即信號(hào)從干涉儀法線方向入射)時(shí),精度最高;θ=0°或180°(即信號(hào)從干涉儀基線方向入射)時(shí), 接收信號(hào)互相關(guān)的幅角arg(r21)反映不出方位角的變化,測(cè)向無效。但單基線干涉儀不能同時(shí)測(cè)量俯仰角和方位角,此時(shí)至少需要另一條獨(dú)立基線的干涉儀對(duì)測(cè)得的數(shù)據(jù)聯(lián)合求解。
1.3 二維干涉儀測(cè)向原理及去模糊處理
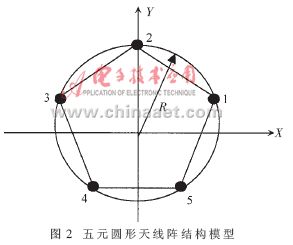
1.3.1 多基線五元圓形天線模型
??? 五通道相位干涉儀采用寬口徑、多基線的五元圓形天線陣,五邊形的五個(gè)陣元均勻分布在半徑為R的圓上,五個(gè)陣源分別為1、2、3、4、5,如圖2所示。天線陣平面與地面平行,測(cè)得的方位角θ為以天線到地面的垂足為原點(diǎn),目標(biāo)在地面上的方位角。測(cè)得的俯仰角φ對(duì)應(yīng)于目標(biāo)到原點(diǎn)的距離(俯仰角0°對(duì)應(yīng)原點(diǎn))。
兩個(gè)陣元接收信號(hào)之間的互相關(guān)為:
??  ??
??
?
??? 方位角θ和俯仰角φ的具體計(jì)算如下:
??? 
?
式中,i=1~5,令r56=r51、r67=r12、r78=r23、r89=r34;atan2(y,x)代表四象限求反正切函數(shù);arcsin代表反正弦函數(shù)。k1、k2為整數(shù),且滿足:

在課題給定的條件下,最大俯仰角為60°。在俯仰角大于28°的情況下,可能出現(xiàn)模糊。
1.3.2 去模糊處理
為了消除測(cè)向模糊,采用多組基線測(cè)向,各組基線得出的解的交集即為真實(shí)方向。對(duì)于本文研究的多基線五元圓形天線陣,當(dāng)有信號(hào)入射時(shí),每組基線均可得到一組測(cè)量值。設(shè)為:
(34,51): (θ11,φ11)、(θ12,φ12)…
(12,34): (θ21,φ21)、(θ22,φ22)…
(45,12): (θ31,φ31)、(θ32,φ32)…
(23,45): (θ41,φ41)、(θ42,φ42)…
(51,23): (θ51,φ51)、(θ52,φ52)…
以上五組值中,只有真實(shí)方向才會(huì)每次都出現(xiàn)。取五組值中數(shù)值最相近的一對(duì)角度,即可得到真實(shí)方向。
2 測(cè)向算法的硬件調(diào)試及仿真
由于需要對(duì)五通道輸入信號(hào)做相關(guān)運(yùn)算和角度運(yùn)算,計(jì)算量大且多為浮點(diǎn)運(yùn)算。這里采用TMS320C6711芯片為核心組成硬件系統(tǒng)數(shù)字信號(hào)處理單元,并在該硬件系統(tǒng)上完成了五通道相位干涉儀算法仿真研究。
2.1 TMS320C6711和TDS510USB-E的特點(diǎn)
TMS320C6711是TI公司于1997年推出的DSP芯片。C6711片內(nèi)有8個(gè)并行處理單元,分相同的兩組,C6711的體系結(jié)構(gòu)采用VLIW結(jié)構(gòu),單指令字長為32bit,8個(gè)指令組成一個(gè)指令包。芯片內(nèi)部設(shè)置了專門的指令分配模塊,可以將每個(gè)256bits指令包同時(shí)分配到8個(gè)處理單元,并由8個(gè)單元同時(shí)運(yùn)行。芯片內(nèi)部時(shí)鐘頻率可以達(dá)到150MHz,芯片最大處理能力可達(dá)到1200MIPS。
TDS510USB-E是以TMS320C6000為核心的硬件調(diào)試系統(tǒng)。仿真器為USB2.0接口設(shè)備。
2.2 測(cè)向處理器硬件設(shè)計(jì)
????測(cè)向處理器硬件框圖如圖3所示。
?
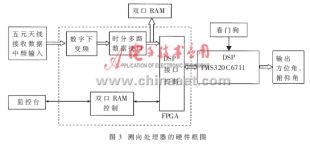
????數(shù)字下變頻單元輸入5通道接收機(jī)接收的信號(hào),并去掉載波的零中頻I、Q信號(hào)(5通道共10路I、Q信號(hào))。
FPGA包括數(shù)字下變頻單元、時(shí)分多路數(shù)據(jù)接口、DSP的EMIF接口控制及雙口RAM控制四大模塊。
雙口RAM存儲(chǔ)測(cè)向處理所需數(shù)據(jù),考慮到DSP中測(cè)向算法所需要的內(nèi)存容量,因此其不少于10K。
2.3 測(cè)向算法軟件的實(shí)現(xiàn)
CCS是TI的集成性DSPs軟件開發(fā)工具。在一個(gè)開放式的插件結(jié)構(gòu)下,CCS內(nèi)部集成了C6000代碼產(chǎn)生工具、軟件模擬器、實(shí)時(shí)基礎(chǔ)軟件DSP/BIOS等軟件工具。在CCS下,開發(fā)者可以對(duì)軟件進(jìn)行編輯、編譯、調(diào)試、代碼性能測(cè)試和項(xiàng)目管理等所有工作。選擇C語言作為應(yīng)用程序的設(shè)計(jì),是因?yàn)镃6000中采用優(yōu)化ANSI C編譯器,它的輸入是C語言源代碼,輸出為TMS320匯編代碼。即將符合ANSI標(biāo)準(zhǔn)的C代碼轉(zhuǎn)換為目標(biāo)DSPs的匯編代碼,一般的算法可采用C代碼實(shí)時(shí)實(shí)現(xiàn)。
五通道干涉儀測(cè)向算法軟件流程圖如圖4所示。
?

2.4 五通道相位干涉儀算法的硬件調(diào)試及仿真結(jié)果
???在透徹分析五通道相位干涉儀算法原理的基礎(chǔ)上,依據(jù)軟件工程的原則規(guī)范,采用C語言設(shè)計(jì)出了五通道相位干涉儀算法的軟件,然后在PC機(jī)上用C6711的C編譯器編譯、匯編、鏈接了軟件的C源代碼,最后將軟件加載到目標(biāo)板上進(jìn)行運(yùn)行、調(diào)試。
2.4.1 測(cè)向處理器中數(shù)據(jù)的來源
五通道送入TMS320C6711的數(shù)據(jù)由科學(xué)計(jì)算語言Matlab6.2在WINDOWS2000操作平臺(tái)上仿真得出,即采用模擬QPSK信號(hào),調(diào)制速率為9600bps,噪聲是 Matlab6.2內(nèi)部函數(shù)randn產(chǎn)生的高斯白噪聲,并用Hilbert變換將其變換為復(fù)噪聲。
采樣信號(hào)長度:512點(diǎn)
信噪比:5dB、10dB
仿真頻點(diǎn):1800MHz
2.4.2 硬件調(diào)試結(jié)果
表1、表2、表3分別列出了幾種情況下待測(cè)俯仰角和方位角與CCS中得到的俯仰角和方位角的對(duì)比。其中,phai、theta分別表示待測(cè)俯仰角與方位角,phai測(cè)量值和theta測(cè)量值是由運(yùn)行CCS2.1中的測(cè)向程序得到的。
?



運(yùn)行結(jié)果表明,五通道相位干涉儀測(cè)向信號(hào)處理的硬件實(shí)現(xiàn)是可行的。當(dāng)俯仰角大于28°時(shí),用前面所述的去模糊方法,可以完全消除由于模糊帶來的角度不確定問題。當(dāng)仿真數(shù)據(jù)中不加入噪聲時(shí),該硬件系統(tǒng)的輸出結(jié)果與真實(shí)值基本吻合。信噪比對(duì)測(cè)向性能的影響較大。
在CCS2.1環(huán)境中,采用盡可能優(yōu)化的干涉儀法測(cè)向定位程序,用CCS2.1提供的記時(shí)工具CLOCK測(cè)量執(zhí)行時(shí)間,從仿真數(shù)據(jù)輸入到確定出信號(hào)方向的時(shí)間約為7ms,基本達(dá)到了實(shí)時(shí)信號(hào)處理的要求。
??? 以上所做的硬件調(diào)試是在用仿真語言MATLAB對(duì)五通道相位干涉儀測(cè)向算法在天線誤差、信道幅度及相位誤差存在的條件下進(jìn)行仿真驗(yàn)證的基礎(chǔ)上進(jìn)行的,在硬件調(diào)試中側(cè)重對(duì)測(cè)向算法的驗(yàn)證。硬件調(diào)試運(yùn)行結(jié)果表明五通道相位干涉儀具有噪聲可抑制、靈敏度高、線性范圍大、測(cè)向響應(yīng)時(shí)間快等優(yōu)點(diǎn),這些優(yōu)點(diǎn)使得單信號(hào)環(huán)境下的相位干涉儀測(cè)向機(jī)制更具有優(yōu)勢(shì)。同時(shí),五通道相位干涉儀算法的硬件實(shí)現(xiàn)也為工程上實(shí)現(xiàn)新一代電子測(cè)向系統(tǒng)打下了堅(jiān)實(shí)的基礎(chǔ)。
?
參考文獻(xiàn)
[1] W.D.斯坦利.數(shù)字信號(hào)處理.北京:科學(xué)出版社,1979
[2] 張賢達(dá),保 錚.通信信號(hào)處理.北京:國防工業(yè)出版社,2000
[3] 趙淑清,鄭 薇.隨機(jī)信號(hào)分析.哈爾濱:哈爾濱工業(yè)大學(xué)出版社,1999年
[4] 陳亞勇.MATLAB信號(hào)處理詳解.北京:人民郵電出版社,2001年
[5] 龐偉正.高分辨測(cè)向算法對(duì)三種信號(hào)源測(cè)向精度及分辨率的分析與模擬.雷達(dá)與對(duì)抗,1996(4):1~5
[6] 李 卿. 二維數(shù)字化瞬時(shí)測(cè)向技術(shù).電子對(duì)抗,1982;(7):58~75