
使用GEO 衛(wèi)星組網(wǎng)的某應(yīng)用系統(tǒng)中,衛(wèi)星信號的收發(fā)采用13 m 桁架式天線,以步進方式跟蹤衛(wèi)星。由于GEO 衛(wèi)星軌道傾角較小(理論值為0) ,實際工作中定期通過南北保持將傾角控制在較小范圍內(nèi),因而桁架式天線能夠正常跟蹤衛(wèi)星。當(dāng)GEO 衛(wèi)星進入壽命末期,星上燃料不足,為節(jié)省燃料,衛(wèi)星停止南北保持控制,導(dǎo)致衛(wèi)星軌道傾角不斷變大,步進跟蹤模式無法正常跟蹤衛(wèi)星,導(dǎo)致系統(tǒng)部分重要參數(shù)不能滿足系統(tǒng)設(shè)計指標(biāo),影響系統(tǒng)提供正常服務(wù)。
1 步進跟蹤方式
步進跟蹤是桁架式天線跟蹤衛(wèi)星的方式,該方式基于GEO 衛(wèi)星遙測信號中的AGC 電平來判斷天線是否對準(zhǔn)衛(wèi)星。當(dāng)遙測數(shù)據(jù)的AGC 電平低于設(shè)定值時,天線以步進方式向上下左右4 個方向調(diào)整天線指向,并監(jiān)測AGC 電平是否達到峰值,若到達峰值,說*線已對準(zhǔn)衛(wèi)星。
衛(wèi)星轉(zhuǎn)發(fā)器出站通道螺旋極電流是判斷天線是否對準(zhǔn)衛(wèi)星,以及衛(wèi)星出站信號波束覆蓋范圍內(nèi)信號質(zhì)量的一個重要參數(shù),當(dāng)天線準(zhǔn)確對準(zhǔn)衛(wèi)星時,螺流值保持穩(wěn)定。隨著GEO 衛(wèi)星軌道傾角的進一步變大,天線每次調(diào)整時都會導(dǎo)致螺流的大幅度波動,圖1 是天線步進跟蹤模式下衛(wèi)星傾角變大后螺流一天的變化情況。

圖1 步進跟蹤方式下衛(wèi)星通道螺流變化圖
2 程序跟蹤方式
針對步進跟蹤模式存在的不足,提出了一種程序控制天線跟蹤衛(wèi)星的方法,稱之為程序跟蹤方法。
該方法利用衛(wèi)星星歷中衛(wèi)星位置信息解算天線的指向,即方位角和俯仰角,并以指令的形式驅(qū)動天線控制單元(OCU) 控制天線跟蹤衛(wèi)星。
該方法采用軌道反推法,根據(jù)衛(wèi)星星歷精確計算地面天線指向,在實現(xiàn)過程中有其中2 個關(guān)鍵問題需要研究解決,分別是天線指向的計算、控制天線跟蹤衛(wèi)星的策略。
系統(tǒng)采用地球同步軌道衛(wèi)星,所以首先考慮使用地球同步軌道衛(wèi)星地面天線計算公式來計算地面天線指向。在天線指向計算過程中,已知量是衛(wèi)星星歷數(shù)據(jù)中衛(wèi)星的位置和天線所在地面的經(jīng)度和緯度。
已知量: ①衛(wèi)星星歷數(shù)據(jù)中衛(wèi)星X 位置信息、衛(wèi)星Y位置信息和衛(wèi)星Z 位置信息3 個參數(shù); ②系統(tǒng)地面天線地面位置經(jīng)度和位置緯度。
(1) 解算衛(wèi)星經(jīng)度
衛(wèi)星星下點經(jīng)度:

(2) 解算地面天線指向
對準(zhǔn)靜止衛(wèi)星時地面站天線主波束的方位角和俯仰角的計算公式推導(dǎo):設(shè)地面站A 的經(jīng)緯度為φ1和θ1 ,靜止衛(wèi)星S 的星下點S′的經(jīng)緯度為φ2和θ2 。
φ= φ2 - φ1為星下點S′對地球站A 的經(jīng)度差。RE為地球半徑(6 378 km) ; hE 為衛(wèi)星離地面的高度;α為地球站A 與星下點S′在地球面上的大圓弧所對的地心角。
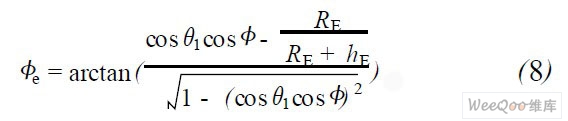
利用幾何學(xué)和球面三角學(xué)的一些基本公式,不難求出:當(dāng)A 站天線對準(zhǔn)衛(wèi)星S 時,其仰角φe 、方位角φa 與經(jīng)度差φ、地面站緯度θ1 的函數(shù)關(guān)系為:

用球面三角學(xué)的余弦定理可得:

因此可得:

對于靜止衛(wèi)星而言:

根據(jù)上述對準(zhǔn)靜止衛(wèi)星時地面站天線主波束的方位角和俯仰角的計算公式推導(dǎo),可以確定:
方位角計算公式為:

俯仰角計算公式為:
得到天線的方位和俯仰值,對解算獲得值進行修正后和步進跟蹤時天線指向數(shù)據(jù)進行比較, 發(fā)現(xiàn)計算精度只能達到0. 1°,不能滿足使用要求。
通過進一步研究分析和試驗,發(fā)現(xiàn)問題是由于GEO 衛(wèi)星軌道傾角變大后,衛(wèi)星軌道傾角超出了靜止軌道衛(wèi)星正常工作時設(shè)計指標(biāo)要求, 因此研究中需將衛(wèi)星看作非靜止軌道衛(wèi)星, 在此前提下研究天線指向計算方法。
設(shè)φe 為天線俯仰角, φa 為天線方位角,其計算公式為:
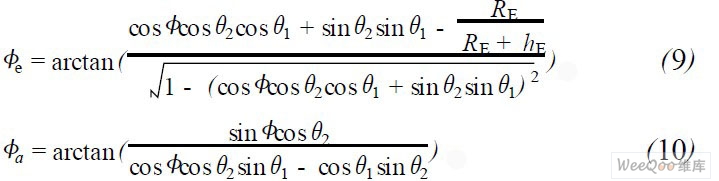
利用此公式解算獲得天線的指向數(shù)據(jù)跟實際天線指向數(shù)據(jù)進行比較,所得數(shù)據(jù)精度為0. 01°,滿足使用要求。
此公式中,由于要使用到衛(wèi)星的星下點經(jīng)維度,首先要利用坐標(biāo)轉(zhuǎn)換將衛(wèi)星星歷數(shù)據(jù)XYZ 轉(zhuǎn)換成BLH 坐標(biāo)。計算公式如下:
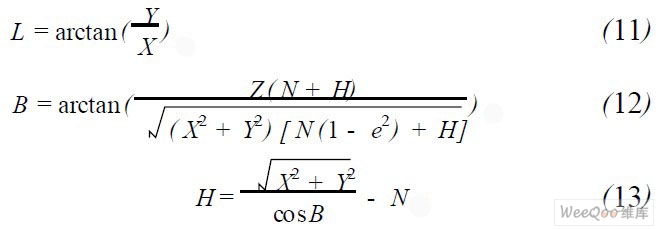
式中, N 為橢球面卯酉圈的曲率半徑; e 為橢球的第一偏心率; a 、b 為橢球的長短半徑; f 為橢球扁率;W 為第一輔助系數(shù)。
3 天線跟蹤策略
天線跟蹤策略主要研究天線指向調(diào)整指令的發(fā)送時機。步進跟蹤方式中調(diào)整的判別依據(jù)有2 個:
一是預(yù)先設(shè)定跟蹤頻度,當(dāng)達到設(shè)定的時間節(jié)點時,進行步進式跟蹤; 二是當(dāng)AGC 電平低于門限值時,進行步進式跟蹤。由于GEO 衛(wèi)星相對地球靜止,在一段時間內(nèi)偏離角度較小,因而設(shè)置30 min 的頻度就能較好地保證天線對衛(wèi)星的跟蹤。AGC 電壓在軌道傾角較小的情況下具有相對平穩(wěn)性,衛(wèi)星傾角變大后波動較大, 造成系統(tǒng)頻繁啟動步進跟蹤,30 min的頻度間隔已不能滿足系統(tǒng)穩(wěn)定工作的要求,且13 m 桁架式天線頻繁跟蹤衛(wèi)星會加大天線的磨損,降低天線使用壽命。因此,頻度設(shè)置需要考慮天線調(diào)整次數(shù)與系統(tǒng)穩(wěn)定性之間的矛盾。調(diào)整過于頻繁,則會加大桁架式天線的磨損;若調(diào)整時間間隔過大,則影響系統(tǒng)參數(shù)的穩(wěn)定性,系統(tǒng)不能穩(wěn)定工作,為了解決這一矛盾,提出采用程序跟蹤、檔位和控制頻度相結(jié)合的控制模式。檔位的含義是: ,其其中ΔAZ 為方位角的計算值與實際值的差值,ΔEL 為俯仰角的計算值與實際值的差值。檔位與天線波束偏離衛(wèi)星可接受的偏差角度有關(guān),即與天線波束偏離衛(wèi)星所造成的衛(wèi)星接收功率下降的可接受程度有關(guān)。依據(jù)該天線特性,天線的3 dB 半波束寬度為0112°,2 dB 半波束寬度為0110°,1 dB 半波束寬度為0108°。如果將門限θ設(shè)置為0112°、0110°或0108°,衛(wèi)星接收上行功率對應(yīng)下降3 dB、2 dB、1 dB。控制頻度是天線調(diào)整的時間間隔,根據(jù)不同衛(wèi)星的狀態(tài)確定不同的控制頻度,并通過試驗找到最佳的控制頻度。
,其其中ΔAZ 為方位角的計算值與實際值的差值,ΔEL 為俯仰角的計算值與實際值的差值。檔位與天線波束偏離衛(wèi)星可接受的偏差角度有關(guān),即與天線波束偏離衛(wèi)星所造成的衛(wèi)星接收功率下降的可接受程度有關(guān)。依據(jù)該天線特性,天線的3 dB 半波束寬度為0112°,2 dB 半波束寬度為0110°,1 dB 半波束寬度為0108°。如果將門限θ設(shè)置為0112°、0110°或0108°,衛(wèi)星接收上行功率對應(yīng)下降3 dB、2 dB、1 dB。控制頻度是天線調(diào)整的時間間隔,根據(jù)不同衛(wèi)星的狀態(tài)確定不同的控制頻度,并通過試驗找到最佳的控制頻度。
在跟蹤過程中,天線的實時指向數(shù)據(jù)將通過網(wǎng)絡(luò)反饋到控制軟件,與解算出的天線指向數(shù)據(jù)進行檔位的計算,結(jié)合頻度形成控制策略。控制流程如圖2 所示。
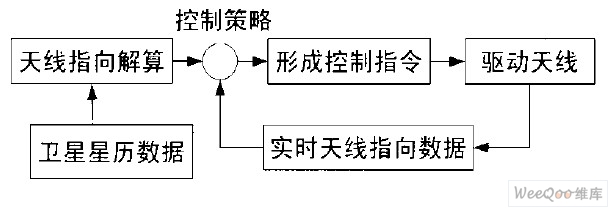
圖2 程序跟蹤控制流程
根據(jù)以上分析,采用0. 08°、0. 10°、0. 12°3 個檔位進行跟蹤試驗,則天線的調(diào)整頻度最快分別為10 min/ 次、13 min/ 次、15 min/ 次,為減少對天線的磨損,選取0. 15°、0. 12°兩個檔位進行試驗。
(1) 檔位為0. 15°
衛(wèi)星螺流值最大為3. 24 mA ,最小為1. 1 mA。另一個通道螺流值最大為3. 75 mA ,最小為1. 00 mA。
衛(wèi)星由北向南過赤道時螺流變化率最大,天線調(diào)整頻度為16 min/ 次。試驗期間螺流變化示意圖如圖3所示。

圖3 檔位0. 15°時螺流一天內(nèi)變化圖
(2) 檔位為0. 12°
衛(wèi)星螺流值最大為3. 24 mA ,最小為2. 02 mA。
另一個通道螺流值最大為3. 75 mA ,最小為1. 7 mA。
衛(wèi)星由北向南過赤道時天線調(diào)整頻度為13 min/ 次。
試驗期間螺流變化示意圖如圖4 所示。
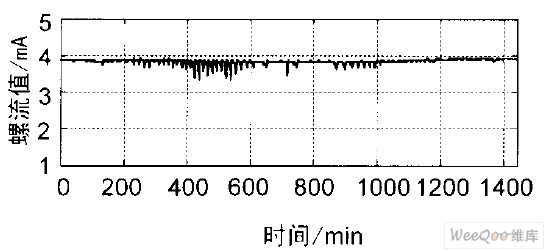
圖4 檔位0. 12°時螺流一天內(nèi)變化圖
對比上述2 次跟蹤試驗,檔位較小時,天線控。
制頻繁,螺流變化區(qū)間較小。為了確保系統(tǒng)的穩(wěn)定運行,螺流值要大于2. 00 mA。針對目前衛(wèi)星的軌道傾角,通過試驗確定檔位0. 08°,時間頻度20 min為最佳調(diào)整策略。
4 試驗結(jié)果
試驗前對天線控制系統(tǒng)部分功能及軟件進行修改,使之能夠采用程序跟蹤的方法,然后將以上提出的桁架式天線跟蹤方法用程序?qū)崿F(xiàn)并接入系統(tǒng)。經(jīng)試驗,系統(tǒng)螺流、AGC 電壓等各項參數(shù)工作正常,天線調(diào)整次數(shù)大幅減少,每次控制天線跟蹤衛(wèi)星時都能一步到位。檔位設(shè)定為0. 08°時一天內(nèi)跟蹤變化如圖5 所示。
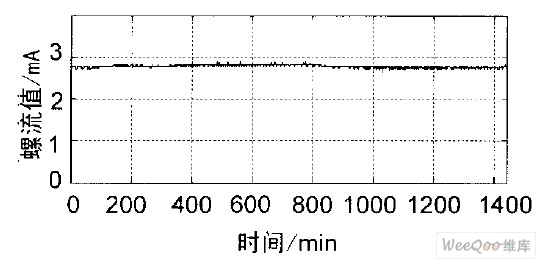
圖5 檔位0. 08°時螺流一天內(nèi)變化圖
5 結(jié)束語
GEO 衛(wèi)星軌道傾角增大后,衛(wèi)星螺旋極電流等參數(shù)每天變化區(qū)間較大,抖動現(xiàn)象嚴(yán)重,約20 min螺流超低報警一次(報警門限2. 0 mA) 。天線采用現(xiàn)有的程序跟蹤模式后螺流變化區(qū)間明顯收斂,且沒有大幅抖動現(xiàn)象。天線調(diào)整次數(shù)大幅減少,且一次調(diào)整到位,提高了天線使用壽命。特別是在衛(wèi)星軌道傾角已超過±2. 5°的情況下,使用該方法仍然能夠滿足天線正確跟蹤衛(wèi)星的各項設(shè)計指標(biāo),確保了系統(tǒng)在衛(wèi)星壽命末期穩(wěn)定可靠運行。