
水下聲學(xué)傳感網(wǎng)絡(luò)的一個重要用途是對水下傳感器節(jié)點(diǎn)所覆蓋的區(qū)域進(jìn)行中長期的水下預(yù)警,、目標(biāo)檢測,、海洋水文環(huán)境要素監(jiān)測等;同時,,在未來多基地和舷外分布式傳感器系統(tǒng)構(gòu)成的龐大的反潛戰(zhàn)網(wǎng)絡(luò)中,,水下數(shù)據(jù)通信是關(guān)鍵,而水下傳感網(wǎng)承擔(dān)著探測,、數(shù)據(jù)通信的重要使命,。所謂的水下無線傳感網(wǎng)就是在一定的水下區(qū)域內(nèi),通過各種傳感器節(jié)點(diǎn)獲取水下信息,,并對水下節(jié)點(diǎn)進(jìn)行聲學(xué)通信和組網(wǎng),,最終通過特定的節(jié)點(diǎn),重新以無線電和有線的形式把在覆蓋區(qū)域中所獲取的信息納入岸上的常規(guī)網(wǎng)絡(luò),,并發(fā)送給觀察者的水下子網(wǎng),。
由于水聲信道的傳輸條件十分惡劣,,特別是淺海水聲信道,信道的帶寬有限,,取決于距離和頻率,,在這種有限的帶寬內(nèi),聲信號受強(qiáng)環(huán)境噪聲,,時變多徑的影響,,可能會導(dǎo)致嚴(yán)重的碼間干擾(ISI)、大的多普勒頻移擴(kuò)展及長的傳輸時延,。另外,,無線電磁波和光波在水中的衰減非常大,無法實現(xiàn)遠(yuǎn)程傳輸,。所以,,在設(shè)計水聲傳感網(wǎng)時可以借鑒無線電組網(wǎng)技術(shù),但是還要考慮水聲信道的特點(diǎn),。
1 水下無線多點(diǎn)通信系統(tǒng)
1.1 系統(tǒng)的總體構(gòu)架
基于水聲信道的特點(diǎn),,同時考慮到頻域上相鄰點(diǎn)的間隔必須大于信道的相干帶寬,所以采用FSK調(diào)制方式的跳頻通信來實現(xiàn),。與陸地上的無線傳感網(wǎng)絡(luò)結(jié)構(gòu)一樣,,水聲傳感網(wǎng)的拓?fù)浣Y(jié)構(gòu)可分為兩大類:一種是小規(guī)模網(wǎng)絡(luò)中采用典型的星型結(jié)構(gòu);另一種,,大規(guī)模,、多節(jié)點(diǎn)、分散密集的環(huán)境中,,組建的分布式對等網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu),。
該設(shè)計實現(xiàn)的是小規(guī)模網(wǎng)絡(luò),采用星型結(jié)構(gòu),,由一臺PC機(jī),,一個主節(jié)點(diǎn)、多個分節(jié)點(diǎn)組成網(wǎng)絡(luò)系統(tǒng),。一臺和Internet網(wǎng)絡(luò)連接的PC機(jī)是網(wǎng)絡(luò)的監(jiān)控中心,,由主節(jié)點(diǎn)來廣播信息實現(xiàn)數(shù)據(jù)傳輸與命令控制,終端設(shè)備直接受控于主節(jié)點(diǎn),,構(gòu)建的水下無線傳感網(wǎng)絡(luò),,系統(tǒng)如圖1所示。

1.2 水下無線多點(diǎn)通信系統(tǒng)的通信協(xié)議
為了水下無線傳感網(wǎng)絡(luò)能穩(wěn)定,、無誤碼地完成命令發(fā)送和數(shù)據(jù)傳輸,,也需要通信協(xié)議來保證其可靠性。結(jié)合水下無線傳感網(wǎng)的需求,在此分別定義PC機(jī)到節(jié)點(diǎn)下行的發(fā)送數(shù)據(jù)通信協(xié)議,,節(jié)點(diǎn)到PC機(jī)的上行接收數(shù)據(jù)通信協(xié)議兩種不同的通信協(xié)議,。
開始符 用“%”的ASCII碼表示數(shù)據(jù)幀頭。
從機(jī)編號 用0~99表示命令是要控制第幾個分節(jié)點(diǎn),。0編號作為廣播式設(shè)定,,即如果是0編號,則水面中繼器向各水聲通信從機(jī)群發(fā)送控制信息,。
控制命令 設(shè)定從節(jié)點(diǎn)需要處理的動作類型編號,,控制指令的編號對應(yīng)水下無線傳感網(wǎng)分節(jié)點(diǎn)采取不同的控制操作。
結(jié)束符 用“MYM”的ASCII碼表示數(shù)據(jù)幀尾,。
(2)接收數(shù)據(jù)的通信協(xié)議

開始符 采用“%”的ASCII碼表示數(shù)據(jù)幀頭,。
從機(jī)編號 當(dāng)前回送的數(shù)據(jù)來自水下無線傳感網(wǎng)的分節(jié)點(diǎn)編號。
數(shù)據(jù)類型 表示所傳輸?shù)臄?shù)據(jù)代表的含義,。
數(shù)據(jù)內(nèi)容 具體監(jiān)測到的數(shù)據(jù)。
結(jié)束符 采用“MYM”的ASCII碼占表示數(shù)據(jù)幀尾,。
2 通信節(jié)點(diǎn)的系統(tǒng)設(shè)計
在水下無線傳感網(wǎng)絡(luò)里有兩種設(shè)備:主節(jié)點(diǎn)和分節(jié)點(diǎn),。主節(jié)點(diǎn)主要負(fù)責(zé)各項監(jiān)測任務(wù)的下達(dá)和數(shù)據(jù)等反饋信息的簡單聚合與處理,是其余各節(jié)點(diǎn)與主控制PC機(jī)之間連接溝通的橋梁,;分節(jié)點(diǎn)主要負(fù)責(zé)搜集傳感器或者接口設(shè)備的測量數(shù)據(jù),,并直接向主節(jié)點(diǎn)反饋響應(yīng)信號或數(shù)據(jù)。PC機(jī)和主節(jié)點(diǎn)之間的通信是通過RS 232實現(xiàn)的,,而主節(jié)點(diǎn)和各節(jié)點(diǎn)之間的通信是通過水聲換能器實現(xiàn),。
2.1 系統(tǒng)硬件結(jié)構(gòu)
系統(tǒng)硬件結(jié)構(gòu)如圖2所示。

從圖2可以看出,,上位機(jī)控制系統(tǒng)通過主節(jié)點(diǎn)完成對無線傳感網(wǎng)絡(luò)的控制,。系統(tǒng)控制核心為凌陽SPCE061A微處理器。它是凌陽科技推出的一款16位結(jié)構(gòu)的微控制器,。其功耗小,,系統(tǒng)處于備用狀態(tài)(睡眠狀態(tài))時的耗電僅為2μA/3.6 V;內(nèi)置2 KWorldSRAM和32 KWord的FLASH,;2個16位可編程定時器/計數(shù)器,;2個10位數(shù)/模轉(zhuǎn)換(DAC)輸出通道;2個16位通用可編程輸入/輸出端口IOA和 IOB,;豐富的中斷資源:定時器A/B中斷,、時基中斷、2個外部中斷以及觸鍵喚醒中斷,;7通道1O位電壓模/數(shù)轉(zhuǎn)換器(ADC)和單通道聲音模/數(shù)轉(zhuǎn)換器,;通用異步串行輸入/輸出接口UART;可通過鎖相環(huán)PLL振蕩器選擇系統(tǒng)時鐘信號;低電壓復(fù)位功能和低電壓檢測功能,;WatchDog功能等,。與其他單片機(jī)相比,SPCE061A是一款資源豐富,、功能強(qiáng)大,、集成度高的微控制器,采用此款單片機(jī)作為該系統(tǒng)的微控制器具有較高的性價比,。
2.2 軟件工作流程
主節(jié)點(diǎn)初始化后,,系統(tǒng)常態(tài)處于等待接收PC機(jī)發(fā)送已準(zhǔn)備好的信息或其他監(jiān)控命令,收到數(shù)據(jù)后調(diào)用發(fā)送程序把收到的信息加上同步頭向相應(yīng)的分節(jié)點(diǎn)發(fā)送,。其軟件流程如圖3所示,。
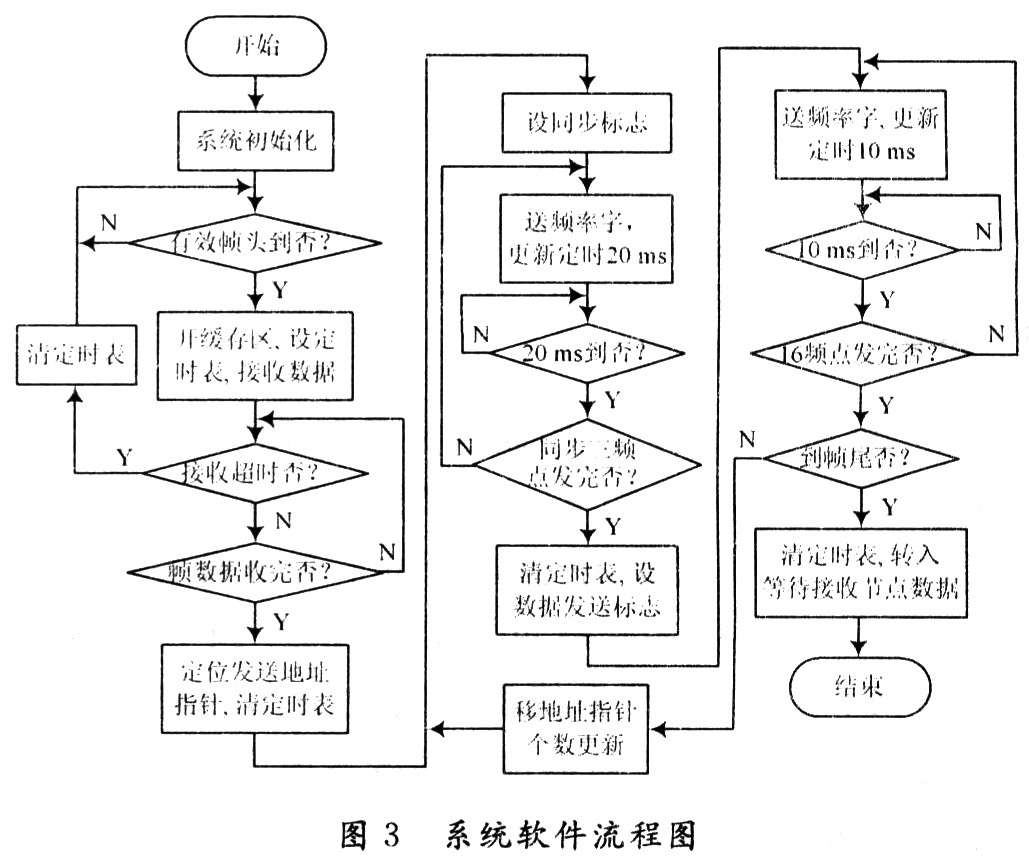
在收到PC的信息后,MCU首先將信息存儲,,當(dāng)所有的數(shù)據(jù)都接收完以后,,將數(shù)據(jù)打包并按跳頻圖案發(fā)送,在經(jīng)過信號調(diào)理模塊的處理之后最后通過換能器將信號發(fā)送出去,。
2.3 節(jié)點(diǎn)電源系統(tǒng)
系統(tǒng)中用到了MCU,、運(yùn)算放大器和多種IC電路,因此需要5路穩(wěn)壓電源,。電壓幅度的跨度從直流-12~12 V.輸出給各路負(fù)載的電流參差不齊,,所以電源系統(tǒng)的設(shè)計對于節(jié)點(diǎn)穩(wěn)定工作起著重要的作用。在這里為了實現(xiàn)單電源為系統(tǒng)供電,,所以要實現(xiàn)電壓的轉(zhuǎn)換,。實現(xiàn)電壓轉(zhuǎn)換功能的電路有兩大類,一類是開關(guān)型穩(wěn)壓電路,,它利用自激勵或他激勵方法產(chǎn)生高頻開關(guān)電流,,用非線性儲能元件(如電感)再次轉(zhuǎn)換成直流,這類轉(zhuǎn)換可以分為升壓型的,、降壓型的和隔離型的,。早先是用分立元件實現(xiàn)DC/DC電壓轉(zhuǎn)換,目前已經(jīng)有各種性能較好的專用IC來完成電路的控制和轉(zhuǎn)換功能,。另一類是線性穩(wěn)壓電路,,現(xiàn)在已經(jīng)發(fā)展到LDo(LowDrop Outregulator),LDO是一種低壓差線性穩(wěn)壓器,。線性穩(wěn)壓器使用晶體管或FET運(yùn)行在其線性區(qū)域內(nèi),,從輸人電壓中減去超額部分的電壓,其壓差由晶體管的管壓降分擔(dān),,從而產(chǎn)生經(jīng)過調(diào)節(jié)后的額定輸出電壓,。根據(jù)以上所述要實現(xiàn)單電源供電不緊需要升降電壓還需要實現(xiàn)正負(fù)電壓的轉(zhuǎn)換,如果電源轉(zhuǎn)換全部采用開關(guān)電源實現(xiàn),將得到很高的效率,,但也使高頻電磁波的干擾增大,。同時考慮到系統(tǒng)對電流的要求,在這里采用開關(guān)電源和線性穩(wěn)壓電源相混合的結(jié)構(gòu),。其中小電流負(fù)載的轉(zhuǎn)換采用線性穩(wěn)壓和LDO實現(xiàn),,正負(fù)電壓和大電流負(fù)載的轉(zhuǎn)換采用開關(guān)電源實現(xiàn)。電源系統(tǒng)框圖如圖4所示,。

3 系統(tǒng)管理程序設(shè)計
PC機(jī)和主節(jié)點(diǎn)之間的通信是通過RS 232串口實現(xiàn)的,,通信波特率9 600 b/s,為了能夠同計算機(jī)接口和終端的TTL器件鏈接,,必需進(jìn)行電平和邏輯關(guān)系的變換,,采用MAX 232芯片就可以實現(xiàn)TTL到EIA雙向電平轉(zhuǎn)換。PC機(jī)主控系統(tǒng)實現(xiàn)對主節(jié)點(diǎn)的控制和傳感信息的獲取,、顯示,。所以主控系統(tǒng)界面應(yīng)當(dāng)包括節(jié)點(diǎn)的控制面板、顯示窗口兩大部分,,如圖5所示,。

控制面板中給出了要發(fā)送信息的節(jié)點(diǎn)號的選擇,在輸入節(jié)點(diǎn)號之后,,按下發(fā)送按鈕主控系統(tǒng)就會通過主節(jié)點(diǎn)向相應(yīng)的節(jié)點(diǎn)發(fā)送信息。節(jié)點(diǎn)在收到信息后執(zhí)行相應(yīng)的指令并反饋信息給PC,。
4 結(jié) 語
這里介紹以高性能16位單片機(jī)為控制核心,,采用跳頻通信的方式實現(xiàn)水下多點(diǎn)通信系統(tǒng)。該系統(tǒng)具有傳輸數(shù)據(jù)可靠,、界面友好,、可擴(kuò)展性強(qiáng)。在水池試驗中取得了滿意的效果,。