
?摘? 要:介紹了DCPS導(dǎo)航定位系統(tǒng)" title="導(dǎo)航定位系統(tǒng)">導(dǎo)航定位系統(tǒng)的工作原理,提出了一種基于DSP的DGPS系統(tǒng)設(shè)計(jì)方案,。通過(guò)開(kāi)發(fā)以DSP為核心的軟硬件系統(tǒng),,與GPS接收機(jī)和無(wú)線(xiàn)數(shù)據(jù)收發(fā)設(shè)備共同組建了DGPS精確定位系統(tǒng),。
關(guān)鍵詞:DGPS? 導(dǎo)航系統(tǒng)" title="導(dǎo)航系統(tǒng)">導(dǎo)航系統(tǒng)? DSP微處理器? 數(shù)據(jù)通信
全球定位系統(tǒng)GPS(Global Positioning System)是一種無(wú)線(xiàn)電導(dǎo)航系統(tǒng),,它不僅具有全球性、全天候和連續(xù)的精密三維定位能力,,而且還能實(shí)時(shí)對(duì)運(yùn)載體的速度,、姿態(tài)進(jìn)行測(cè)定以及精密授時(shí)。目前,,幾乎所有需要導(dǎo)航,、定位的用戶(hù),都被GPS的高精度,、全天候,、全球覆蓋、方便靈活和優(yōu)質(zhì)價(jià)廉所吸引,。
目前,,GPS系統(tǒng)提供的定位精度小于10米,為了得到更高的定位精度,,通常采用差分" title="差分">差分GPS(即DGPS)技術(shù),。DGPS相對(duì)于GPS能為用戶(hù)的導(dǎo)航定位精度帶來(lái)數(shù)量級(jí)的提高,在飛機(jī)精密進(jìn)場(chǎng)著陸,、無(wú)人機(jī),、彈道軌跡測(cè)量、車(chē)輛定位導(dǎo)航等航空,、航天,、航海及車(chē)載領(lǐng)域得到應(yīng)用。
DSP是一種用于處理數(shù)字信號(hào)的微處理器,,隨著半導(dǎo)體制造工藝的發(fā)展和計(jì)算機(jī)體系結(jié)構(gòu)等方面的改進(jìn),,DSP芯片的功能也越來(lái)越強(qiáng)大,。由于DSP在運(yùn)算速度上的優(yōu)勢(shì)及其可編程和易于實(shí)現(xiàn)自適應(yīng)處理的特點(diǎn),使其在嵌入式系統(tǒng)開(kāi)發(fā)中占有一席之地,。
本文介紹利用DSP高速處理,、可編程性能及其在軟硬件上的設(shè)計(jì)實(shí)現(xiàn)的一種有別于一般DGPS導(dǎo)航系統(tǒng)的系統(tǒng)。
1 DGPS工作原理及其系統(tǒng)分析?
1.1 DGPS工作原理?
DGPS選擇一個(gè)位置精確的已知點(diǎn)作為GPS接收機(jī)基準(zhǔn)站,,其余GPS接收機(jī)(移動(dòng)站)分別設(shè)置在需要測(cè)定其位置的載體上,。根據(jù)基準(zhǔn)點(diǎn)的已知精確坐標(biāo),可以求出定位結(jié)果的坐標(biāo)改正數(shù)或距離觀測(cè)值的改正數(shù),。通過(guò)基準(zhǔn)站和移動(dòng)站之間的數(shù)據(jù)鏈,將這些改正數(shù)實(shí)時(shí)傳??? 送給移動(dòng)站,,使移動(dòng)站的GPS接收機(jī)的定位結(jié)果或偽距觀測(cè)量得到改正,。其目的是消除公共誤差項(xiàng),有效地減弱相關(guān)誤差的影響,,以獲得精確的定位結(jié)果,,從而提高定位精度。
1.2系統(tǒng)分析?
一般的DGPS導(dǎo)航系統(tǒng),,其基站由GPS接收機(jī),、實(shí)時(shí)控制計(jì)算機(jī)和無(wú)線(xiàn)發(fā)射機(jī)組成;移動(dòng)站由GPS接收機(jī),、實(shí)時(shí)控制計(jì)算機(jī)(一般為PC機(jī)或工控機(jī))和無(wú)線(xiàn)接收機(jī)組成,。這種DGPS系統(tǒng)由于受單工通信的限制,移動(dòng)站不能將其精確定位數(shù)據(jù)回傳給基站.導(dǎo)致基站不能實(shí)時(shí)觀測(cè)移動(dòng)站的運(yùn)行狀態(tài),。
要實(shí)現(xiàn)移動(dòng)站數(shù)據(jù)的回傳,,則必須在基站和移動(dòng)站之間建立兩條通信數(shù)據(jù)鏈路" title="鏈路">鏈路,即差分修正信息的通信鏈路和差分GPS定位信息的通信鏈路,。若基站和移動(dòng)站分別采用無(wú)線(xiàn)發(fā)射機(jī)和無(wú)線(xiàn)接收機(jī)同時(shí)工作,,由于兩個(gè)頻率的收發(fā)設(shè)備同時(shí)工作,則會(huì)產(chǎn)生無(wú)線(xiàn)數(shù)據(jù)鏈路的干擾,。采用雙工電臺(tái)則能避免這種干擾的產(chǎn)生,。
若實(shí)時(shí)控制計(jì)算機(jī)采用PC機(jī)或工控機(jī),則計(jì)算機(jī)必須具備3個(gè)串口" title="串口">串口才能完成與GPS接收機(jī)2個(gè)串口(用于差分信息及定位信息的通信)和雙工電臺(tái)1個(gè)串口之間的數(shù)據(jù)通信,,以實(shí)現(xiàn)DGPS定位和數(shù)據(jù)的回傳,。但是一般的PC機(jī)和工控機(jī)很難具備3個(gè)串口。
基于以上分析,,本DGPS導(dǎo)航定位系統(tǒng)采用自主研制的DSP系統(tǒng)作為實(shí)時(shí)控制計(jì)算機(jī),,以雙工電臺(tái)作為無(wú)線(xiàn)數(shù)據(jù)收發(fā)設(shè)備來(lái)組建和實(shí)現(xiàn)。
2系統(tǒng)組成及其功能?
2.1系統(tǒng)組成?
系統(tǒng)由基站設(shè)備和移動(dòng)站設(shè)備兩部分構(gòu)成,?;竞鸵苿?dòng)站各自都由GPS接收機(jī),、DSP系統(tǒng)和半雙工電臺(tái)組成。
基站GPS接收機(jī)采用了NCT2000 D,。NCT2000 D是美國(guó)NavCom公司采用最先進(jìn)的獨(dú)有專(zhuān)利技術(shù)研制的,,接收機(jī)能持續(xù)地建立差分GPS實(shí)時(shí)修正的標(biāo)準(zhǔn)并能兼容WAAS/EGNOS的雙頻GPS。移動(dòng)站GPS接收機(jī)采用NovAtel公司的SUPERSTARII,,它特別為低成本,、高可靠定位的應(yīng)用而設(shè)計(jì)。SUPERSTARⅡ可在苛刻的條件(如樹(shù)葉遮擋,、城市高樓林立)下提供高可靠性和優(yōu)異性能,。它易于集成.并可通過(guò)軟件升級(jí)為WAAS。
在基站和移動(dòng)站中,,以TMS320C6713為核心的DSP系統(tǒng)和半雙工數(shù)據(jù)傳輸電臺(tái)WDS4710分別用于實(shí)現(xiàn)實(shí)時(shí)通信控制和無(wú)線(xiàn)收發(fā)功能,,從而完成GPS差分修正信息(符合RTCM SC—104標(biāo)準(zhǔn))和GPS定位數(shù)據(jù)(符合NMEA —83標(biāo)準(zhǔn))的實(shí)時(shí)、準(zhǔn)確傳輸,。
系統(tǒng)組成及其數(shù)據(jù)鏈路如圖1所示,。
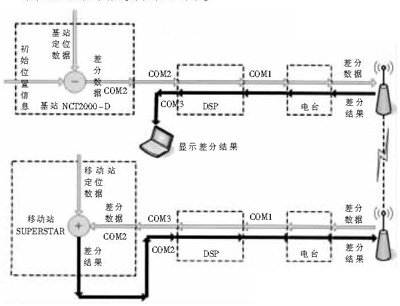
圖1 差分GPS系統(tǒng)數(shù)據(jù)鏈路圖
2 .2功能?
系統(tǒng)利用DSP系統(tǒng)的三個(gè)串口與電臺(tái)及GPS接收機(jī)進(jìn)行數(shù)據(jù)通信,實(shí)現(xiàn)移動(dòng)站DGPS的差分定位和移動(dòng)站的精確定位數(shù)據(jù)的實(shí)時(shí)回傳,。
當(dāng)將DSP系統(tǒng)用在基站時(shí),,? 串口2接收GPS接收機(jī)的RTCM差分信息,通過(guò)串口1向電臺(tái)發(fā)送:串口1接收電臺(tái)接收到移動(dòng)站差分定位后的NMEA信息,,再通過(guò)串口3發(fā)送到基站設(shè)備,,以供基站對(duì)移動(dòng)站的實(shí)時(shí)遙測(cè)或保存數(shù)據(jù)進(jìn)行事后處理。
當(dāng)將DSP系統(tǒng)用在移動(dòng)站時(shí),,串口1接收電臺(tái)接收到基站發(fā)送的RTCM修正數(shù)據(jù),, 再通過(guò)串口3發(fā)送給GPS接收機(jī);GPS接收機(jī)在差分修正后,,將NMEA信息發(fā)送給串口2,,串口1將串口2接收到的數(shù)據(jù)發(fā)送給電臺(tái),電臺(tái)將這些數(shù)據(jù)發(fā)送,。
3 DSP應(yīng)用系統(tǒng)設(shè)計(jì)?
3.1硬件設(shè)計(jì)
本系統(tǒng)的DSP芯片采用TI公司的浮點(diǎn)處理器TMS310C6713,,其主頻可達(dá)200MHz。晶振電路(50MHz)為C6713提供外部時(shí)鐘源,,電源電路分別提供C6713的CPU核心和外圍接口所需的1 .2V及3 .3V直流電源,。復(fù)位電路用于對(duì)系統(tǒng)的復(fù)位。系統(tǒng)的外圍設(shè)備(UART,、??? FLASH,、SDRAM)擴(kuò)展在C6713的EMIF空間,通過(guò)CPLD譯碼選通。
根據(jù)本導(dǎo)航系統(tǒng)對(duì)多串口的需求,,采用TLl6C550和TLl6C552芯片為DSP系統(tǒng)擴(kuò)展了:個(gè)串口,,用于實(shí)現(xiàn)DSP與GPS接收機(jī)、電臺(tái)及PC機(jī)的通信,;Flash用于系統(tǒng)的自啟動(dòng)設(shè)計(jì),;SDRAM擴(kuò)展了DSP系統(tǒng)的外部存儲(chǔ)器空間;電平轉(zhuǎn)換電路將UART的TTL電平轉(zhuǎn)換為標(biāo)準(zhǔn)的RS232電平,。DSP應(yīng)用系統(tǒng)結(jié)構(gòu)如圖2所示,。
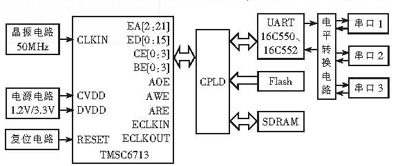
圖2 DSP應(yīng)用系統(tǒng)硬件結(jié)構(gòu)框圖
3.2軟件設(shè)計(jì)?
DSP軟件采用TI公司的軟件集成開(kāi)發(fā)環(huán)境CCS進(jìn)行開(kāi)發(fā)和調(diào)試。系統(tǒng)軟件源程序有C浯言和匯編浯言,。
C浯言程序完成DSP系統(tǒng)初始化及其三個(gè)串口的數(shù)據(jù)收發(fā),。通過(guò)初始化程序,系統(tǒng)主頻設(shè)置為100MHz,,串口通信協(xié)議數(shù)據(jù)傳輸速率設(shè)置為9 600bps,,1位開(kāi)始位,8位數(shù)據(jù)位,,1位停止位,無(wú)奇偶校驗(yàn)位,。串口收發(fā)采用查詢(xún)方式,,C浯言源程序流程如圖3所示。

圖3 通信軟件C語(yǔ)言程序流程圖
匯編浯言程序完成DSP系統(tǒng)的自啟動(dòng)功能,,即將燒寫(xiě)在Flash中的程序搬移到片內(nèi)RAM,。
4實(shí)驗(yàn)結(jié)果分析與說(shuō)明?
GPS數(shù)據(jù)格式采用NMEA—0183通信標(biāo)準(zhǔn)格式。NMEA 0183通信標(biāo)準(zhǔn)的輸出數(shù)據(jù)采用ASCII碼,,包含了經(jīng)度,、緯度、高度,、速度,、日期、時(shí)司,、航向及衛(wèi)星狀況等信息,。GGA信息是GPS接收機(jī)輸出信息的一種,它包含了導(dǎo)航用戶(hù)所關(guān)心的時(shí)間,、經(jīng)緯度和高度信息,。同時(shí)用戶(hù)也可以從GGA信息中了解GPS接收機(jī)的定位情況(即未定位、單點(diǎn)定位和差分定位),。
GGA的數(shù)據(jù)格式為:
$GPGGA,,<1>,<2>,<3>,,<4>,,<5>,<6>,,<7>,,<8>,<9>,,M,,<10>,M,,<11>,,<12>,*hh
當(dāng)GGA數(shù)據(jù)格式中<6>的內(nèi)容為“0”時(shí)表示未定位,,“1”表示單點(diǎn)定位,,“2”表示DGPS定位。通過(guò)觀察移動(dòng)站GPS接收機(jī)發(fā)送的GGA數(shù)據(jù)的信息<6>,,可以了解移動(dòng)站接收機(jī)是否進(jìn)行了DGPS定位,。
當(dāng)基站和移動(dòng)站的GPS接收機(jī)及電臺(tái)傳輸速率設(shè)置為9 600bps、電臺(tái)頻率設(shè)置為460.1MHz后,,將其按照?qǐng)D1所示的數(shù)據(jù)鏈路進(jìn)行系統(tǒng)連接,,在匹配的GPS天線(xiàn)、電臺(tái)天線(xiàn)及直流穩(wěn)壓電源的支持下,,系統(tǒng)可以實(shí)現(xiàn)所設(shè)計(jì)的功能,。
以下是實(shí)驗(yàn)過(guò)程中基站接收到的移動(dòng)站回傳的GGA數(shù)據(jù)。
差分定位前:
$GPGGA,,033838,,3958.8302,N,,11620.6189,,E,1,,04,,3.1,97.3,,M,,—8.3,M,,17,,0000*64
差分定位后:
$GPGGA,,033907,3958.8324,,N,,11620.6044,E,,2,,04,2.5,,97.3,,M,—8.3,,M,,7,0000*58
通過(guò)實(shí)驗(yàn)驗(yàn)證,,本系統(tǒng)通信鏈路通暢,,在實(shí)現(xiàn)DGPS導(dǎo)航定位的同時(shí)能將DGPS定位結(jié)果回傳給基站,使基站能夠?qū)崟r(shí)監(jiān)測(cè)移動(dòng)站的運(yùn)行軌跡.并能保存其定位數(shù)據(jù)以進(jìn)行事后處理,。系統(tǒng)能夠完成預(yù)期的功能,,現(xiàn)已通過(guò)GPS教學(xué)實(shí)驗(yàn)系統(tǒng)驗(yàn)收。此外,,將DGPS系統(tǒng)應(yīng)用于工程領(lǐng)域時(shí),,由于無(wú)線(xiàn)通信和GPS導(dǎo)航定位系統(tǒng)易受外界因素的影響,所以必須考慮無(wú)線(xiàn)數(shù)據(jù)鏈路通信的工作距離,、抗干擾性、電臺(tái)傳輸功率,、電臺(tái)天線(xiàn)增益和電臺(tái)接收信號(hào)靈敏度及移動(dòng)站GPS接收機(jī)受外界因素影響等多方面問(wèn)題.以確保系統(tǒng)數(shù)據(jù)鏈路的暢通.提高系統(tǒng)的穩(wěn)定性和可靠性,。
參考文獻(xiàn)
1王惠南.GPS導(dǎo)航原理與應(yīng)用.北京:科學(xué)出版社,2003
2江思敏,,劉暢.TMS320C6000 DSP應(yīng)用開(kāi)發(fā)教程.北京:機(jī)械工業(yè)出版社,,2005
3高洪民,汪渤.DGPS導(dǎo)航定位系統(tǒng)的設(shè)計(jì)實(shí)現(xiàn).儀器儀表學(xué)報(bào),,2002,;(6)
??? (收稿日期:2005-10-20)