
摘 要: 論述了差分" title="差分">差分GPS算法模型。通過(guò)算法比較,確定了將雙差算法模型作為高精度數(shù)據(jù)處理" title="數(shù)據(jù)處理">數(shù)據(jù)處理軟件的解算模型。在此基礎(chǔ)上,給出了通過(guò)已知坐標(biāo)解算出未知坐標(biāo)的全過(guò)程, 設(shè)計(jì)了以A12 OEM板為核心的GPS接收系統(tǒng)。實(shí)驗(yàn)測(cè)量結(jié)果表明,此GPS接收系統(tǒng)可以實(shí)現(xiàn)高精度的定位。
關(guān)鍵詞: 差分GPS 基線解算 A12 OEM板 外圍電路
GPS利用最簡(jiǎn)單的C/A碼定位,精度可達(dá)到14米。美國(guó)為了防止別的國(guó)家把GPS用于軍事目的,采用SA政策,人為地將誤差引入衛(wèi)星時(shí)鐘和衛(wèi)星數(shù)據(jù)中,故意降低GPS的定位精度" title="定位精度">定位精度。近幾年來(lái),國(guó)內(nèi)外學(xué)者在研究GPS定位精度方面取得了重大進(jìn)展。利用載波相位差分技術(shù)可以進(jìn)行高精度定位,將動(dòng)態(tài)精度提高到厘米級(jí),而靜態(tài)精度甚至可以提高到毫米級(jí)。載波相位差分技術(shù)應(yīng)用雙差算法來(lái)實(shí)現(xiàn)坐標(biāo)的解算,可以有效地消除星鐘誤差和星歷誤差,更重要的是它可以消除接收機(jī)的收鐘誤差。因此顯著地提高了定位精度。
GPS通過(guò)數(shù)據(jù)處理來(lái)提高精度的同時(shí),接收機(jī)的硬件對(duì)精度也有著直接的影響。而GPS-OEM板是封裝極其簡(jiǎn)單、便于二次開發(fā)的GPS傳感器,能完成GPS主要數(shù)據(jù)采集以及簡(jiǎn)單的定位解算功能;通過(guò)對(duì)外圍電路的設(shè)計(jì),再聯(lián)系自開發(fā)的數(shù)據(jù)后,處理軟件可得到高精度的定位。
本文以載波相位差分為例,討論靜態(tài)高精度差分算法模型及數(shù)據(jù)處理方法,設(shè)計(jì)了以A12 OEM板為核心的低成本高精度GPS接收系統(tǒng)。此系統(tǒng)包括電源、系統(tǒng)設(shè)置電路、通信和時(shí)間標(biāo)志信息輸出等外圍電路。試驗(yàn)結(jié)果證明,該GPS接收系統(tǒng)測(cè)量精度" title="測(cè)量精度">測(cè)量精度達(dá)到毫米級(jí)。
1 高精度GPS算法
1.1載波相位差分算法模型[1]
利用載波相位進(jìn)行測(cè)量,就其本身而言,測(cè)量精度可達(dá)0.5~2.0mm。然而GPS測(cè)量會(huì)受到多種誤差的影響,如衛(wèi)星軌道誤差、衛(wèi)星鐘差以及電離層和對(duì)流層的折射誤差的影響。為了提高定位精度,有必要研究各種誤差規(guī)律,建立改正模型對(duì)其進(jìn)行改正。但由于這種改正往往難以完全正確地反映規(guī)律,所以,觀測(cè)值中仍然存在殘余影響。雖然可通過(guò)在觀測(cè)方程中加入相應(yīng)的附加參數(shù)來(lái)消除其影響,然而大量的多余未知參數(shù)不但增加了平差計(jì)算的工作量,而且還影響定位未知參數(shù)的可靠性。一種簡(jiǎn)單有效消除或減弱誤差影響的方法是將這些觀測(cè)量進(jìn)行不同的線性組合。
1.1.1靜態(tài)相對(duì)定位
在GPS相位定位中,常用的三種差分(線性組合)是單差、雙差和三差。由于GPS接收機(jī)使用穩(wěn)定性較差的石英鐘,它難以用模型來(lái)表示。如果將每個(gè)觀測(cè)歷元的接收機(jī)鐘差都作為未知數(shù)求解,則將使解算基線向量的法方程中的未知數(shù)個(gè)數(shù)大大增加。而使用雙差模型后,接收機(jī)鐘差的影響被消除了,它既不涉及鐘差模型,又使法方程中未知數(shù)個(gè)數(shù)大大減少,這也是雙差模型的最大優(yōu)勢(shì)。所以本文在研究算法時(shí),采用的是雙差模型來(lái)解算。
1.1.2 雙差分觀測(cè)方程
若在求單差分的基礎(chǔ)上再對(duì)不同衛(wèi)星S j和Sk求差,便可得到雙差觀測(cè)方程:

1.2 數(shù)據(jù)處理
1.2.1 基線向量解算的數(shù)學(xué)模型[2~3]
由GPS衛(wèi)星定位原理可知,設(shè)在GPS標(biāo)準(zhǔn)時(shí)刻ti,在測(cè)站1、2同時(shí)對(duì)衛(wèi)星S j和Sk進(jìn)行載波相位測(cè)量,用向量解算方法由雙差觀測(cè)值模型解算基線向量,由基線向量與站星之間的關(guān)系可得站星雙差相位觀測(cè)方程為:
式中,衛(wèi)星S j和Sk在選擇j=1的衛(wèi)星為參考衛(wèi)星時(shí),k=2,3,4……。對(duì)于j=1,k=2;j=1,k=3,……,其站星雙差觀測(cè)值誤差方程可仿照公式(6)、(7)寫出,對(duì)不同觀測(cè)歷元(即ti時(shí)刻)可分別列出類似的各歷元時(shí)刻的一組誤差方程。
1.2.2 基線解算
t1歷元在1、2測(cè)站上同時(shí)觀測(cè)了s個(gè)衛(wèi)星,在連續(xù)觀測(cè)的情況下,共有n=M(s-1)個(gè)誤差方程,其中M為觀測(cè)歷元個(gè)數(shù)。
將所有誤差方程寫成矩陣形式:V=AX+L(7)
其中j為歷元個(gè)數(shù),j=n/(k-1)。
按各類雙差觀測(cè)值等權(quán)且彼此獨(dú)立,即權(quán)陣P為單位陣,組成法方程:
NX+B=0 (8)
式中,N=ATA;B=ATL。可解得X為:
X=-N-1B=ATA-1(ATL)(9)
若1點(diǎn)坐標(biāo)已知,可求得2點(diǎn)坐標(biāo):
2 接收機(jī)的設(shè)計(jì)
2.1 A12 OEM板
A12 OEM板是法國(guó)Thales Navigation公司生產(chǎn)的模塊式GPS單頻單板定位設(shè)備,其原理框圖[4~5]如圖1所示。A12 OEM板采用的是單3.3V電源供電,其內(nèi)嵌有定位XA處理器,具有快速軟件執(zhí)行速率,并可通過(guò)RS232串行接口對(duì)存儲(chǔ)在閃存中的定位解算軟件進(jìn)行更新或升級(jí);具有12通道代碼差分,集GPS接收、定位于一體;帶有完整載波相位數(shù)據(jù)輸出,能夠跟蹤L1頻率的C/A碼及載波相位;12個(gè)獨(dú)立的并行相關(guān)通道用于跟蹤全部GPS可見(jiàn)衛(wèi)星,各個(gè)通道可同時(shí)跟蹤1顆GPS衛(wèi)星的信號(hào)。
由于采用代碼及載波跟蹤GPS的L1頻段,A12 OEM板具有較高的定位精度,工作時(shí)能為用戶提供三維位置、速度、時(shí)間和其他狀態(tài)信息。根據(jù)GPS衛(wèi)星星座的空間布置,接收機(jī)有12條并行通道,在同一時(shí)刻最多可觀測(cè)到12顆衛(wèi)星。同時(shí),它作為GPS接收機(jī)核心部分,既可以配置成參考站,又可以配置成移動(dòng)單元,廣泛用于定位和導(dǎo)航領(lǐng)域。
2.2 外圍電路設(shè)計(jì)[5]
A12 OEM板及PC機(jī)的正常運(yùn)行需要運(yùn)行如圖2所示的相應(yīng)外圍電路。定位信號(hào)由天線接收,經(jīng)過(guò)低噪聲前置放大后,進(jìn)入射頻前端。射頻前端具有變頻作用,將射頻信號(hào)轉(zhuǎn)換為中頻信號(hào)。中頻信號(hào)經(jīng)采樣信號(hào)采樣、量化后,轉(zhuǎn)換為數(shù)字中頻信號(hào)。數(shù)字中頻信號(hào)進(jìn)入相關(guān)通道經(jīng)過(guò)處理后,解譯出導(dǎo)航電文。微處理器接收導(dǎo)航電文數(shù)據(jù),進(jìn)行相應(yīng)處理后給出所需的定位信號(hào)或提供特定的應(yīng)用服務(wù)。
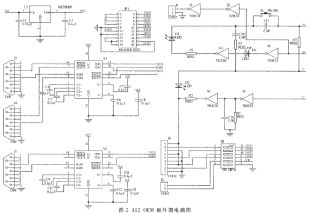
本設(shè)計(jì)中,射頻前端和相關(guān)通道部分選用Philips半導(dǎo)體公司生產(chǎn)的SAA1575 和 UAA1570芯片。其中,UAA1570能夠與外圍電路組合完成射頻前端的功能。A12 OEM板有兩種接口:JP1連接器是通常使用的20引腳輸入/輸出及供電接口,用于外圍應(yīng)用電路的連接,J1連接器是BNC型的RF天線接口,用于連接GPS射頻天線。
A12 OEM板與外圍應(yīng)用電路組合構(gòu)成GPS接收機(jī),實(shí)現(xiàn)與PC機(jī)的通信。通過(guò)OEM板接收、采集衛(wèi)星信息,運(yùn)行存儲(chǔ)于EEPROM中,并根據(jù)定位原理編寫的解算軟件計(jì)算出相應(yīng)的結(jié)果,從而實(shí)現(xiàn)PC機(jī)利用專用軟件完成對(duì)GPS接收機(jī)的設(shè)置及控制。該電路為此類GPS接收機(jī)提供了三個(gè)串行口:主串行口J4、差分串行口J5和可選擇串行口J3。其中,主串行口用于與導(dǎo)航計(jì)算機(jī)通信,差分串行口用于差分修正信息的輸入或輸出。對(duì)于電源、差分信息、時(shí)間標(biāo)志信息的輸出則設(shè)有相應(yīng)的發(fā)光二極管指示其工作狀態(tài)。整個(gè)電路結(jié)構(gòu)簡(jiǎn)單、緊湊,各種功能易于實(shí)現(xiàn)。
2.2.1 電源電路
電源電路主要為整個(gè)接收機(jī)系統(tǒng)提供電源,同時(shí)產(chǎn)生接收機(jī)運(yùn)行時(shí)所需的高電平,為此采用了三端穩(wěn)壓電源模塊mc78m05以及0.1μF、0.33μF的電容組成電源電路,以提供5V的主電源Vcc(其允許誤差為±5%)。
2.2.2 系統(tǒng)設(shè)置電路
為使該系統(tǒng)正常運(yùn)行,電路中通過(guò)DIP(S8)開關(guān)、跳線(J6)完成系統(tǒng)的初始設(shè)置。本方案中采用的默認(rèn)設(shè)置為:DIP1~DIP3設(shè)為關(guān)閉狀態(tài),DIP4~DIP6設(shè)為打開狀態(tài);跳線分別使得J6-8和J6-9、J6-5和J6-6、J6-2和J6-1連通,從而將S8-1端、S8-2端設(shè)為高電平,S8-3端設(shè)為低電平;復(fù)位按鈕RESET默認(rèn)為開。
2.2.3 通信電路
通信電路以MAX202為核心部件。MAX202芯片是一款較為常用的電平轉(zhuǎn)換芯片,可以實(shí)現(xiàn)RS-232電平與TTL電平的雙向轉(zhuǎn)換。該芯片內(nèi)部有電壓倍增電路和轉(zhuǎn)換電路,僅需外接幾個(gè)小電容和+5V電源便可工作,使用十分方便;芯片中還有兩路發(fā)送、接收串行通信接口,與JP1連接器各相應(yīng)引腳的連接總是從“出”到“入”和從“入”到“出”,因此要注意其發(fā)送、接收引腳的對(duì)應(yīng)。MAX202需四個(gè)0.1μF電容配合,且要保證電容極性連接正確。A12 OEM板通過(guò)RS-232接口輸出二進(jìn)制的測(cè)量數(shù)據(jù)信息,只有每次傳送的歷書是新的GPS衛(wèi)星信號(hào)時(shí),接收的信息才為有效信息。
2.3 1PPS信息輸出電路
時(shí)間標(biāo)志信息輸出電路用74HC14實(shí)現(xiàn)對(duì)時(shí)間信號(hào)的處理。74HC14是施密特觸發(fā)器,可驅(qū)動(dòng)10個(gè)LS-TTL負(fù)載。由于施密特觸發(fā)器屬于電平觸發(fā),可用來(lái)將緩慢上升和下降的輸入信號(hào)加快,在電路中用于不規(guī)則波形的整形及變換。因此用它將A12 OEM板輸出的時(shí)間波形變換成規(guī)則的脈沖信號(hào),從而輸出秒脈沖時(shí)間信息1PPS(1 Pulse Per Second)。標(biāo)準(zhǔn)GPS時(shí)間的秒脈沖輸出1PPS的誤差精度在±250ns范圍內(nèi)。在絕對(duì)模式時(shí),1PPS的調(diào)整精度為±250ns;在相對(duì)模式時(shí),1PPS的調(diào)整精度為±1ms。時(shí)間標(biāo)記信息輸出1PPS排除了時(shí)鐘漂移,每秒輸出一次并與GPS時(shí)間同步。
3 測(cè)量實(shí)驗(yàn)與結(jié)果分析
在定位解算計(jì)算機(jī)上運(yùn)行GPS監(jiān)控軟件,用戶通過(guò)該程序控制計(jì)算機(jī)與GPS接收機(jī)的通信,從而執(zhí)行相應(yīng)的定位操作并顯示相應(yīng)的輸出信息。為配合監(jiān)控軟件工作,利用外圍應(yīng)用電路中的DIP開關(guān)及跳線對(duì)該接收系統(tǒng)進(jìn)行設(shè)置,并把主串行口J4連接到計(jì)算機(jī)的串行接口COM1或COM2,把差分串行接口J5連接到差分信息源或其他GPS接收機(jī)的DGPS信息輸出端;在BNC插座J1上連接GPS天線。系統(tǒng)連接好后再接通外圍應(yīng)用電源。所有的操作命令和數(shù)據(jù)請(qǐng)求都通過(guò)外圍應(yīng)用電路及軟件發(fā)送、接收或解碼。在高精度定位中,用于位置解算的誤差源主要包括SA誤差、電離層誤差和對(duì)流層誤差等。采用差分技術(shù)可有效降低以上三種誤差。
本次實(shí)驗(yàn)借用同濟(jì)大學(xué)GPS基準(zhǔn)站的觀測(cè)數(shù)據(jù),在同濟(jì)大學(xué)中德學(xué)院大樓519室和西南樓門前草坪完成。系統(tǒng)連接好后,運(yùn)行GPS監(jiān)控軟件并將串行接口的傳輸速率設(shè)置為默認(rèn)值為9 600bps。靜止?fàn)顟B(tài)觀測(cè)四小時(shí),在水平方向上沿正東、正西、正南或者正北方向以1mm間隔移動(dòng)至20mm,每移動(dòng)一次觀測(cè)半小時(shí),在豎直方向上也以1mm間隔移動(dòng)至20mm,每移動(dòng)一次觀測(cè)半小時(shí)。使用計(jì)算機(jī)采集到的數(shù)據(jù),用處理軟件進(jìn)行數(shù)據(jù)處理。
實(shí)驗(yàn)時(shí)把單點(diǎn)" title="單點(diǎn)">單點(diǎn)定位和差分定位的精度做了比較,解算是用自編仿真軟件對(duì)GPS基準(zhǔn)站的數(shù)據(jù)進(jìn)行處理,以精確測(cè)出基準(zhǔn)站坐標(biāo)為(-2848181.61685953 4647549.59891956 3311986.31800702)。下面介紹測(cè)量結(jié)果及分析。
(1) 單點(diǎn)定位和差分定位的比較
圖3和圖4分別給出了單點(diǎn)獨(dú)立定位和差分定位的X坐標(biāo)和Y坐標(biāo)的比較曲線。從圖中可以看出單點(diǎn)獨(dú)立定位與差分定位結(jié)果在X坐標(biāo)上的偏差約為2米左右,而Y坐標(biāo)的偏差約為4米左右。在本測(cè)量系統(tǒng)中X坐標(biāo)測(cè)量值的精度要優(yōu)于Y坐標(biāo)測(cè)量精度。
圖5給出了單點(diǎn)獨(dú)立定位和差分定位的高程坐標(biāo)的比較曲線。從圖中可以看出,單點(diǎn)獨(dú)立定位與差分定位結(jié)果在高程坐標(biāo)上的偏差約為10米左右。在GPS測(cè)量系統(tǒng)中,X、Y坐標(biāo)測(cè)量值的精度要優(yōu)于高程坐標(biāo)測(cè)量精度。
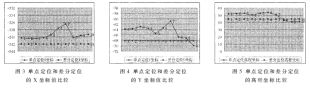
通過(guò)比較可以得出以下結(jié)論:經(jīng)過(guò)差分運(yùn)算可以有效地剔除GPS測(cè)量系統(tǒng)誤差,提高測(cè)量精度。
(2) 精度分析
平差后矢量的技術(shù)指標(biāo)
移動(dòng)前后靜態(tài)測(cè)量時(shí)間約為1小時(shí);本次測(cè)量的實(shí)際空間位移約為10mm,移動(dòng)傾角為70°;水平方向位移分量為10×cos70=3.42mm;垂直分量為10×sin70=9.40mm。
測(cè)量數(shù)據(jù)的處理:
X1-X2=395035mm-395041mm=-6mm
Y1-Y2=147369mm-147373mm=-4mm
Z1-Z2=113931mm-113929mm=2mm
可得到定位誤差為:
δxy=3.42-7.2=-3.78mm
δz=9.4-2=7.4mm
根據(jù)仿真實(shí)驗(yàn)分析可得,精度達(dá)到毫米級(jí),水平方向定位精度較好,垂直方向較差。
本文論述了GPS的載波相位差分算法以及數(shù)據(jù)處理的數(shù)學(xué)模型,這是GPS定位技術(shù)軟件方面的核心部分。同時(shí),設(shè)計(jì)了以A12 OEM板為核心的 GPS接收機(jī),結(jié)合自行開發(fā)的數(shù)據(jù)處理軟件進(jìn)行了測(cè)量實(shí)驗(yàn),結(jié)果表明,能實(shí)現(xiàn)高精度定位,定位精度滿足工程要求。實(shí)驗(yàn)表明,該方案是完全可行的,并且由于采用了自行設(shè)計(jì)的后處理軟件開發(fā)工具,其成本相當(dāng)?shù)汀4私邮諜C(jī)最突出的特點(diǎn)是體積小、功耗低(A12 OEM板的封裝尺寸為39mm×60mm×10mm,功耗<250mW),在實(shí)際應(yīng)用中非常有意義。
參考文獻(xiàn)
1 李天文. GPS原理及應(yīng)用.北京:科學(xué)出版社,2003:94~107
2 劉大杰. 全球定位系統(tǒng)(GPS)的原理與數(shù)據(jù)處理.上海:同濟(jì)大學(xué)出版社,2003
3 李曙光,荊便順,蘇彥民. GPS系統(tǒng)SA誤差模型的分析和建立. 長(zhǎng)安大學(xué)學(xué)報(bào)(自然科學(xué)版),2002;(3)
4 施久亮. 用AT91R40008設(shè)計(jì)高動(dòng)態(tài)GPS接收機(jī).單片機(jī)與嵌入式系統(tǒng)應(yīng)用,2004;(6)
5 劉基余. GPS衛(wèi)星導(dǎo)航定位原理與方法.北京:科學(xué)出版社,2003:147~196
6 高洪民等.12通道GPS接收機(jī)及其外圍電路設(shè)計(jì).電子產(chǎn)品世界,2002;(8)