
摘 要: 在研究了電動助力轉向系統(tǒng)(EPS" title="EPS">EPS)及其控制器" title="控制器">控制器(ECU)結構和工作原理的基礎上,設計了基于ARM S3C44B0X單片機" title="單片機">單片機的控制系統(tǒng)。通過方向控制電路、H橋電機驅動電路和PWM脈寬調制技術實現(xiàn)對電機的控制。研制的硬件控制器通過了有關的電氣性能測試,并采用模糊PD控制策略" title="控制策略">控制策略對EPS原地轉向的助力特性進行了仿真分析。
關鍵詞: EPS 控制器 單片機 控制策略
電動助力轉向系統(tǒng)(EPS)是汽車工程領域的熱門課題之一,目前研究的主要內容為EPS系統(tǒng)的控制規(guī)則和硬件控制器(ECU)的設計,而控制規(guī)則的實現(xiàn)必須以一個穩(wěn)定、可靠的控制器為基礎。現(xiàn)有的控制器多數(shù)基于功能增強的8位單片機,也有的用DSP。目前,以32位處理器作為高性能嵌入式系統(tǒng)開發(fā)的核心是嵌入式技術發(fā)展的必然趨勢。ARM處理器因其具有突出的優(yōu)點在32位微控制器領域里得到非常廣泛的應用,在32位嵌入式系統(tǒng)應用中穩(wěn)居世界第一[1]。在汽車電子技術領域,從車身控制、底盤控制、發(fā)動機管理、主被動安全系統(tǒng)到車載娛樂、信息系統(tǒng)等,都離不開嵌入式技術的支持[2],因此,ARM處理器在汽車電子領域有著良好的應用前景。本文研究了電動助力轉向系統(tǒng)(EPS)及其控制器(ECU)的結構和工作原理,并在此基礎上研究了基于ARM S3C44B0X單片機的電動助力轉向控制系統(tǒng)。
1 EPS工作原理
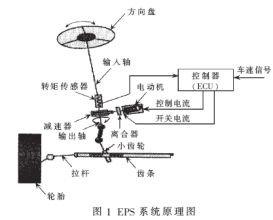
圖1是一個典型的電動助力轉向系統(tǒng)原理圖。當汽車轉向時,轉矩傳感器測出方向盤的輸出轉矩,送給控制器ECU,控制器再綜合由車速傳感器送來的車速信號,并根據(jù)相應的控制策略確定一個目標電流,控制電動機轉動。電動機的輸出轉矩通過離合器、減速機構施加給轉向柱輸出軸,并經(jīng)過齒輪齒條等轉向機構的作用使車輪偏轉一定的角度,從而起到對轉向系統(tǒng)的助力作用。
2 控制器的結構和原理
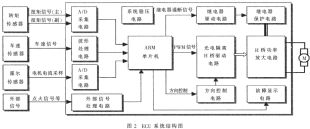
控制器主要由A/D采集電路、H橋電機控制電路和系統(tǒng)保護電路等組成,其結構如圖2所示。當車輛啟動后,系統(tǒng)接收到點火信號,開始進入工作狀態(tài),采集轉矩信號和車速信號并送給單片機。根據(jù)已定的控制規(guī)則,由系統(tǒng)確定一個目標電流和電機轉動的方向,并以PWM調制的方式通過H橋電路來驅動電機轉動。同時,系統(tǒng)對電機的輸出電流進行采樣,一方面將采樣結果與目標電流相比較,用以對電機進行控制;另一方面結合車速信號,用以對系統(tǒng)的保護[3]。當電機電流大于設定值或車速高于設定值時,為了保護電機和系統(tǒng)的安全,控制器將對繼電器發(fā)出一個控制信號,斷開電機電源,停止助力,待系統(tǒng)正常后,再恢復助力功能。
3 控制器的設計
本文設計的控制器采用32位的ARM S3C44B0X單片機作為控制器的核心,由于S3C44B0X單片機集成了豐富的硬件資源,使得電路設計大為簡化,提高了系統(tǒng)的可靠性,同時也為系統(tǒng)將來的擴展和升級留有一定余地。方向控制信號和PWM信號相結合,經(jīng)光耦加載到H橋驅動電路,控制電機的運行狀態(tài),電路簡單易行。脈寬調制方式采用單極性PWM,避免了MOS管直通的可能性,不僅可靠,脈寬占空比也易于調整。
3.1 ARM S3C44B0X介紹
SUMSUNG公司的S3C44B0X是基于ARM7 TDMI的體系結構,并在此基礎上集成了豐富的外圍功能模塊,主要有:8KB的Cache,外部擴充存儲控制器,LCD控制器,2個UART,5個PWM定時器和1個內部定時器,8路10位ADC,71個通用可編程I/O口,8個外部中斷源及看門狗定時器[4]。同時,ARM單片機支持C語言開發(fā),有利于系統(tǒng)控制軟件的開發(fā)和調試。
3.2 A/D數(shù)據(jù)的采集
S3C44B0X采用的是逐次逼近式10位ADC,輸入電壓范圍為0~2.5V,轉換精度為2.5V/210=2.4mV。對于轉矩傳感器,其輸出電壓范圍為0~5V,所以只需對信號進行低通濾波處理和分壓處理。對于電機的采樣電流,由于有正負區(qū)別,還應通過電平轉換使其成為正電壓。其電路如圖3所示。其中,R1的作用是將霍爾傳感器的輸出信號(0~50mA)轉換成相應的電壓信號。

3.3電機控制電路
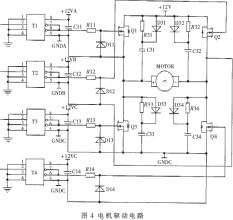
電機的控制電路由方向控制電路和光耦隔離MOSFET H橋電機驅動電路組成。電機驅動電路原理如圖4所示。T1、T2、T3、T4為光耦部件,一方面用于系統(tǒng)強電和弱電的隔離,另一方面用于驅動MOSFET部件。所以在選擇光耦型號時,應選擇輸出功率較強的光耦(如TLP250,其輸出電流最大可達1.5A)。電機的PWM控制信號和方向控制信號都是經(jīng)光耦后加載到MOSFET部件的。當T1和T4導通、T2和T3關斷時,對應的Q1、Q2導通,Q2、Q3關斷,電機電流經(jīng)Q1、MOTOR、Q4流向地,此時電機正轉;電機反轉時,器件的通斷情況正好相反。
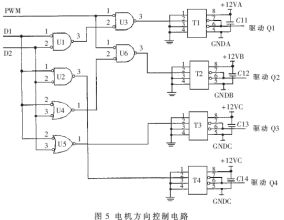
方向控制電路主要由與門和或非門組成,其電路原理如圖5所示。U1、U2、U3、U6為與門,U4、U5為或非門,系統(tǒng)采用單極性PWM調制方式,D1、D2為方向控制信號。D1、D2共有四種組合。11時電機正轉,00時電機反轉,01和10時電機停止。當D1、D2為11時,與門U1、U2輸出高電平,其中,U2的信號用于驅動光耦T4,開啟MOS管Q4。U3根據(jù)PWM信號和U1的信號驅動光耦T1,開啟MOS管Q1,即Q1、Q4導通。此時,或非門U4、U5和與門U6的輸出為低電平,光耦T2、T3截止,MOS管Q2、Q3關斷,電機正轉。當D1、D2為00時,情況正好相反,T1、T4截止,Q1、Q2關斷,T2、T3開啟,Q2、Q3導通,電機反轉。
3.4 電路的保護設計
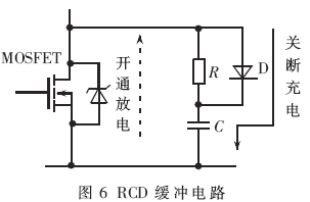
保護電路主要由MOSFET緩沖電路和系統(tǒng)的繼電器保護電路組成。開關器件在開通和關斷過程中可能同時承受過壓、過流、過大的di/dt、du/dt以及過大的瞬時功率,緩沖電路就是在開關過程中保護開關器件,抑制高電壓和大電流的防護措施。本設計采用的是RCD充、放電緩沖電路,如圖6所示。當MOSFET關斷時,經(jīng)二極管D向電容C充電,由于二極管正向導通時壓降很小,所以關斷時的過壓吸收效果與電容的吸收效果相當。當MOSFET開通時,電容C通過電阻R放電,限制了MOSFET中的開通尖峰電流。RCD緩沖電路能有效地改善開關器件的開關特性,減小開關器件本身的功耗發(fā)熱。
繼電器保護電路主要是用于電機的過流保護并確保EPS在設定的車速范圍內工作。ECU通過對電機電流的采樣來確保電機工作在額定電流范圍內。一旦電機電流高于設定的保護值,或車速超出設定范圍,ECU就會向繼電器發(fā)出一個關斷信號,切斷電機的電源,停止助力。
4 系統(tǒng)控制策略及仿真
國內外學者研究了不同的EPS控制策略,如PID控制[5~6]、H_∞魯棒控制[7]、模糊控制[8]等。由于轉矩信號和車速信號的輸入特點非常適合采用模糊控制,而PD控制則具有較好的控制性能,因而綜合這兩種方法的特點,本文采用了模糊PD控制策略。其控制結構框圖如圖7所示。
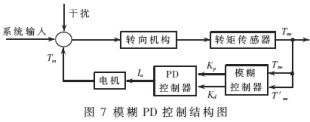
這里,系統(tǒng)輸入為地面反作用力矩,Tsw為方向盤把持力矩,Kp為PD控制的比例系數(shù),Kd為PD的微分系數(shù),Ia為目標電流,Tm為電機輸出轉矩。模糊控制器通過對轉矩傳感器信號的采集,在線整定Kp、Kd參數(shù),用于PD控制,再由PD控制來確定系統(tǒng)的目標電流。在MATLAB環(huán)境下應用上述控制策略對EPS系統(tǒng)進行原地轉向仿真,給定如圖8所示的轉向盤轉向力矩的輸入曲線,設定系統(tǒng)電流上限為30A。經(jīng)過仿真計算得到的EPS系統(tǒng)對該輸入的電流響應如圖9所示。
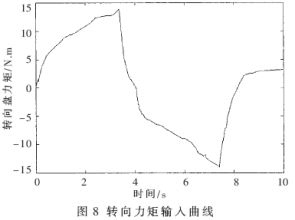
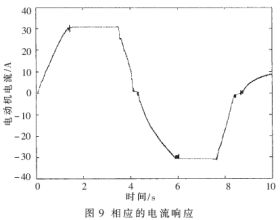
從仿真結果可以看出,采用該種控制策略,電動機輸出電流對方向盤輸入轉矩有較好的跟蹤性能,說明本文研究的模糊PD控制策略具有良好的助力效果。
參考文獻
1 田 澤.嵌入式系統(tǒng)開發(fā)與應用教程[M].北京:北京航空航天大學出版社,2005
2 何 瑋,劉昭度,楊其校等. 汽車嵌入式SoC系統(tǒng)的應用與發(fā)展[J].電子技術應用,2005;31(7)
3 余永權,汪明慧, 黃 英. 單片機在控制系統(tǒng)中的應用[M].北京:電子工業(yè)出版社,2003
4 麻友良,丁衛(wèi)東.汽車電器與電子控制系統(tǒng)[M].北京:機械工業(yè)出版社,2003
5 Kim, J, Song J. Control logic for an electric power steering system using assistmotor[J]. Mechatronics, 2002;12:447~459
6 Jeonghoon S, Kwanguck B, Heung Seob Kim. Model devel-opment and control methodology of a new electric power steering system[J]. Poc.Instn Mech.Engrs Part D:J. Automo-bile Engineering,2004
7 丘 明,楊家軍, 劉 照等. 基于H_∞魯棒控制原理的電動助力轉向系統(tǒng)研究[J].華中科技大學學報(自然科學版),2002;32(12)
8 李書龍,許 超.電動助力轉向系統(tǒng)中的模糊控制[J].公路交通科技,2004;(4)