
1 概述
直流電動(dòng)機(jī)以其優(yōu)秀的線形機(jī)械特性、較寬的調(diào)速范圍、大的啟動(dòng)轉(zhuǎn)矩、控制方法較簡(jiǎn)單等優(yōu)點(diǎn),在各種驅(qū)動(dòng)、伺服系統(tǒng)中有著廣泛的應(yīng)用[1],但傳統(tǒng)的直流電機(jī)中的電刷和換向器由于直接接觸、摩擦造成的磨損、火花、噪聲等是一個(gè)不可忽視的問(wèn)題。永磁無(wú)刷直流電機(jī)(PMBLDCM,以下直接簡(jiǎn)稱為BLDCM)利用電子換向替代了機(jī)械換向,沒(méi)有磨損、火花,噪聲大大減小,目前有著大量的應(yīng)用,但如何實(shí)現(xiàn)最低成本的最優(yōu)化控制,迄今為止尚無(wú)完美的解決方案。本文給出了較之大部分控制方法成本更加低廉、結(jié)構(gòu)更加簡(jiǎn)單的解決方案,并通過(guò)實(shí)驗(yàn)進(jìn)行了驗(yàn)證。
對(duì)于無(wú)刷直流電機(jī),控制方法的核心是要獲得電機(jī)位置或速度的實(shí)時(shí)信息。目前獲得位置、速度信息的方法主要有兩種:1.依靠霍耳元件或者碼盤來(lái)獲得位置、速度信號(hào)[2],這種方法比較直觀簡(jiǎn)單,但是存在如下問(wèn)題:增加了器件成本,在無(wú)法加裝傳感器的時(shí)候無(wú)效;2.無(wú)傳感器(Sensorless)方法,即不加裝傳感器,目前主要有反電動(dòng)勢(shì)過(guò)零檢測(cè)法[3][4]、三次諧波分析法[5]、Kalman預(yù)測(cè)法[6],而這幾類方法大都局限于反電動(dòng)勢(shì)為梯形的BLDCM,而且有的需要加裝特別的外部電路[3][4],在一些場(chǎng)合下無(wú)法實(shí)現(xiàn);有的算法復(fù)雜,會(huì)造成較大的實(shí)時(shí)誤差[6],也不是很實(shí)用。目前一些公司如NEC,Renesas已經(jīng)開(kāi)發(fā)出了針對(duì)正弦反電動(dòng)勢(shì)BLDCM的無(wú)傳感器的控制芯片,但是價(jià)格貴,調(diào)試繁瑣,升級(jí)不方便是很大的問(wèn)題。本文給出了一種新的針對(duì)正弦反電動(dòng)勢(shì)電機(jī)的控制方法,控制采用了TI公司DSP芯片(TMS320LF2407A),核心代碼完全用C語(yǔ)言開(kāi)發(fā),便于調(diào)試、升級(jí),同時(shí)實(shí)現(xiàn)了很好的啟動(dòng)和調(diào)速功能,并對(duì)整個(gè)電路進(jìn)行了最大的簡(jiǎn)化,無(wú)需加裝特別的采樣電路,利用系統(tǒng)中的電路保護(hù)電阻完成對(duì)電流的采樣。
2 系統(tǒng)結(jié)構(gòu)綜述
參考圖1,本系統(tǒng)中通過(guò)單電流采樣,在DSP中實(shí)現(xiàn)電流鑒別算法和濾波算法,得到對(duì)應(yīng)的三相電流,通過(guò)速度位置估算算法計(jì)算出電機(jī)轉(zhuǎn)子的當(dāng)前位置和速度,然后利用PI反饋算法生成新的PWM作用于電機(jī)之上,完成一個(gè)控制流程。這樣循環(huán)往復(fù),實(shí)現(xiàn)了電機(jī)從啟動(dòng)到正常運(yùn)轉(zhuǎn)以及調(diào)速的功能,下面將分別闡述各部分的原理與實(shí)現(xiàn)。
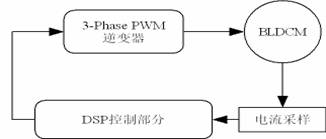
圖1 BLDC控制系統(tǒng)示意圖
3 單電流采樣的實(shí)現(xiàn)
如圖2所示,電機(jī)的驅(qū)動(dòng)采用了七段式的空間矢量法(SVPWM,Space Vector PWM),利用六個(gè)依次相差60度的基本矢量和全0矢量(與全1矢量等效),根據(jù)不同的作用時(shí)間合成按給定轉(zhuǎn)速作圓周轉(zhuǎn)動(dòng)的旋轉(zhuǎn)矢量。
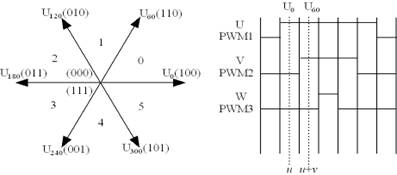
圖2 SVPWM波形生成及單電流采樣示意圖
從上圖中我們可以看出,一個(gè)SVPWM周期可以劃分成七個(gè)小的時(shí)間段(此即七段法名稱的由來(lái)),不同的時(shí)間段對(duì)應(yīng)不同的開(kāi)關(guān)管控制電壓,不同的控制電壓造成了逆變電路中功率開(kāi)關(guān)管不同的通斷狀態(tài),而不同的通斷狀態(tài)則對(duì)應(yīng)著不同的電流流向,因此只要我們知道了當(dāng)前的電流流向狀態(tài),就可以從兩次不同時(shí)間的采樣電流(分別對(duì)應(yīng)若干電流之和)中提取出需要的電流。以第0扇區(qū)為例(如圖2右側(cè)所示),在第一次電流采樣中得到了Iu,第二次得到了(Iu+Iv),由于在很短的時(shí)間內(nèi),電流不會(huì)發(fā)生突變,這樣就可以根據(jù)(Iu+Iv+Iw=0)推算出三相電流,完成了單電流采樣(One-shunt current detection)。
這一算法簡(jiǎn)潔明了,但也存在著一定的問(wèn)題:第一,在采樣的過(guò)程中往往會(huì)引入較多的噪聲,需要進(jìn)行濾波;第二,存在扇區(qū)邊界切換問(wèn)題,我們從圖2中可以看出,在旋轉(zhuǎn)矢量跨越邊界的時(shí)候,由于某一基本矢量作用時(shí)間太短會(huì)導(dǎo)致采樣無(wú)法完成,這個(gè)時(shí)候,可以通過(guò)限制作用時(shí)間最小值來(lái)保證采樣過(guò)程正常進(jìn)行,但這樣必然會(huì)使生成的正弦波發(fā)生畸變,我們通過(guò)簡(jiǎn)單的濾波(例如限制兩次電流采樣值的差異幅值,根據(jù)歷史值修正新值等)去掉畸變點(diǎn),可以實(shí)現(xiàn)很好的效果。
實(shí)際采樣以及濾波處理結(jié)果如下(圖3),從圖中可以看出通過(guò)濾波達(dá)到了很好的電流檢測(cè)效果,完全可以滿足進(jìn)一步的控制需求。
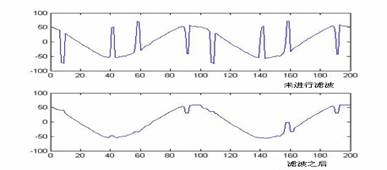
圖3單電流采樣電流結(jié)果(未濾波與濾波后的比較)
4 無(wú)位置、速度傳感器下電機(jī)控制方法詳述
這里將從電機(jī)的初始化啟動(dòng)、正常運(yùn)轉(zhuǎn)和調(diào)速三個(gè)方面敘述電機(jī)控制的全過(guò)程,并給出電機(jī)控制算法的流程圖,讓讀者更能夠從整體上了解這一控制方法。
啟動(dòng)過(guò)程:由于整個(gè)系統(tǒng)沒(méi)有傳感器以獲得電機(jī)的實(shí)際位置,如果從任意位置啟動(dòng),可能會(huì)造成電機(jī)反轉(zhuǎn)甚至啟動(dòng)完全失敗,因此需要對(duì)電機(jī)轉(zhuǎn)子位置進(jìn)行初始化,即把后面控制算法中涉及到的轉(zhuǎn)子角度的初始值清零。我們采用的初始化方法是生成一個(gè)固定的PWM脈沖序列,該序列的特點(diǎn)是只作用于在某一相,最后將電機(jī)鎖定于某一磁極,達(dá)到了初始化的目的。
正常運(yùn)轉(zhuǎn):目前我們采用TI公司的TMS320LF2407A作為控制的DSP,該DSP本身具備PWM 控制寄存器,通過(guò)較簡(jiǎn)單的程序就能完成前面所述的七段法SVPWM波的輸出。
整體控制算法流程如圖4所示:
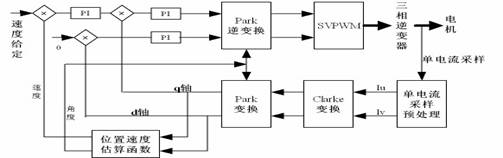
圖4控制算法流程
電機(jī)通過(guò)單電流采樣得到兩個(gè)采樣電流值,通過(guò)電流識(shí)別方法,計(jì)算出三相電流,利用Clarke和Park變換將電流映射到d、q坐標(biāo)系下,估算出角度和速度值,通過(guò)結(jié)合了積分分離的PI控制算法,完成對(duì)電機(jī)的反饋控制,然后經(jīng)過(guò)Park逆變換,控制生成了新的SVPWM波,完成一次循環(huán)。這里用到的位置、速度估算函數(shù)由于篇幅所限,將另做描述。
調(diào)速的方法:在電機(jī)運(yùn)轉(zhuǎn)過(guò)程中,當(dāng)需要調(diào)整轉(zhuǎn)速時(shí),我們采用分段加減速的方法,將給定目標(biāo)速度和電機(jī)當(dāng)前速度之間分成若干小段,逐級(jí)進(jìn)行調(diào)速,從而達(dá)到很穩(wěn)定的調(diào)速效果。
5 實(shí)驗(yàn)結(jié)論及進(jìn)一步的工作
目前我們已經(jīng)在一臺(tái)92BL(1)C50-15H的BLDC上實(shí)驗(yàn)成功了上述控制算法,完成了從啟動(dòng)到正常運(yùn)轉(zhuǎn)、加減速、拖動(dòng)負(fù)載的全部工作,電機(jī)運(yùn)行平穩(wěn),噪聲小,輸出轉(zhuǎn)矩穩(wěn)定。我們測(cè)試了雙電流采樣和單電流采樣的方法,均達(dá)到了理想的效果。目前正在進(jìn)行將控制方法移植到空調(diào)壓縮機(jī)上的嘗試,已取得初步成功,下一步將改進(jìn)算法,增加諧波補(bǔ)償功能,使電機(jī)運(yùn)轉(zhuǎn)更加平穩(wěn),測(cè)試對(duì)更多種型號(hào)電機(jī)的控制,并考慮進(jìn)行工業(yè)上的應(yīng)用。
本文作者創(chuàng)新點(diǎn):采用電機(jī)保護(hù)電路電阻作為唯一的電流采樣電阻,結(jié)合單電流采樣鑒別算法得出三相電流,實(shí)現(xiàn)了對(duì)反電動(dòng)勢(shì)為正弦波的BLDC的無(wú)傳感器控制。