
文獻(xiàn)標(biāo)識(shí)碼: A
文章編號(hào): 0258-7998(2014)08-0062-03
傳統(tǒng)的蓄電池充放電控制裝置大部分采用比較低端的控制芯片,如51系列單片機(jī),或功能簡(jiǎn)單的CPLD器件[1-2]。51系列單片機(jī)功能單一,速度慢,在數(shù)據(jù)處理上具有先天的劣勢(shì),在上下位機(jī)的系統(tǒng)中,其所支持的通信方式無(wú)法滿足高速采集系統(tǒng)的要求。而功能比較單一的CPLD器件在價(jià)格上有一定的優(yōu)勢(shì),但隨著嵌入式技術(shù)的發(fā)展和數(shù)據(jù)處理能力的不斷提升,對(duì)系統(tǒng)的要求越來(lái)越高。本文對(duì)機(jī)車蓄電池充放電檢測(cè)控制系統(tǒng)的設(shè)計(jì)是基于DSP-TMS320F2812PGFA平臺(tái),外部擴(kuò)展了CPLD、SRAII、雙口RAM等,完成了整個(gè)控制系統(tǒng)的硬件設(shè)計(jì),軟件設(shè)計(jì)分為上位機(jī)和下位機(jī)軟件設(shè)計(jì)兩個(gè)部分,對(duì)檢測(cè)系統(tǒng)的參數(shù)和檢測(cè)數(shù)據(jù)的存儲(chǔ)、顯示以及整個(gè)控制系統(tǒng)的運(yùn)行邏輯進(jìn)行了設(shè)計(jì),完成了一款具有能量雙向流動(dòng)、網(wǎng)側(cè)電流正弦化、功率因數(shù)高、功率靈活調(diào)控特點(diǎn)的檢測(cè)控制裝置[3-4]。測(cè)試結(jié)果表明,系統(tǒng)運(yùn)行穩(wěn)定,數(shù)據(jù)通信采用符合CAN2.0A/B協(xié)議的隔離的CAN總線接口,具有較高可靠性。
1 系統(tǒng)原理
整個(gè)蓄電池充放電裝置的原理框圖如圖1所示。本文的設(shè)計(jì)主要針對(duì)控制系統(tǒng)。
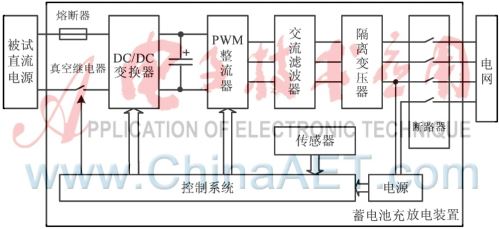
圖1 蓄電池充放電裝置圖
控制系統(tǒng)主要負(fù)責(zé)對(duì)DC/DC電路、PWM整流器進(jìn)行相關(guān)控制,采集傳感器的相關(guān)信號(hào)。DC/DC變換器的主要作用是將外部被試直流電源的直流電壓轉(zhuǎn)變到系統(tǒng)運(yùn)行要求的值域范圍內(nèi),此外將對(duì)輸入功率進(jìn)行調(diào)節(jié)和控制,DC/DC變換器前端設(shè)計(jì)的熔斷器和真空繼電器是為了提高系統(tǒng)的可靠性;PWM整流器則將DC/DC變換器輸出的穩(wěn)定直流電壓逆變?yōu)槿嘟涣麟妷海桓綦x變壓器實(shí)現(xiàn)蓄電池充放電裝置與電網(wǎng)的隔離,提高試驗(yàn)系統(tǒng)的安全性能,保障操作者的人身安全,提高蓄電池充放電裝置對(duì)被試電源的適應(yīng)性[9-10]。隔離變壓器與交流電網(wǎng)之間的濾波器和斷路器則是為了濾除PWM整流器工作產(chǎn)生的高頻諧波污染和在需要時(shí)將蓄電池充放電裝置從電網(wǎng)中完全切除。
2 控制系統(tǒng)的硬件設(shè)計(jì)
2.1 控制系統(tǒng)硬件總體設(shè)計(jì)
硬件設(shè)計(jì)采用DSP-TMS320F2812PGFA為核心,實(shí)現(xiàn)反饋信號(hào)的處理、A/D轉(zhuǎn)換、DC/DC變換器和PWM整流器控制脈沖的產(chǎn)生、系統(tǒng)運(yùn)行狀態(tài)的監(jiān)視和控制、故障保護(hù)和存儲(chǔ)、RS485通信等功能,外部擴(kuò)展了CPLD、SRAII、雙口RAM、四通道14位A/D轉(zhuǎn)換器、四通道12位D/A轉(zhuǎn)換器等,利用CPLD實(shí)現(xiàn)了16路數(shù)字輸入通道和16路數(shù)字輸出通道,另外還具有16路PWM輸出通道、八路模擬信號(hào)輸入及處理電路,對(duì)外串行接口包括符合CAN2.0A/B協(xié)議的隔離的CAN總線接口、符合USBI.1協(xié)議的USB總線接口、SPI同步串口等。
控制系統(tǒng)的整個(gè)結(jié)構(gòu)圖如圖2所示。
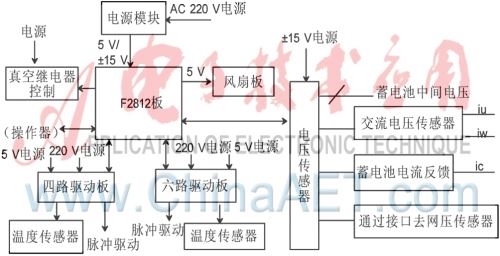
圖2 控制系統(tǒng)的結(jié)構(gòu)框圖
2.2 接觸器電路的設(shè)計(jì)
接觸器線圈電壓為AC 220 V。接觸器控制板的電路原理圖如圖3所示。
接觸器的總體控制如圖4所示。其中K1為輔助觸頭,用于構(gòu)成自鎖電路。另一個(gè)輔助觸頭用于向控制系統(tǒng)輸送啟動(dòng)命令。
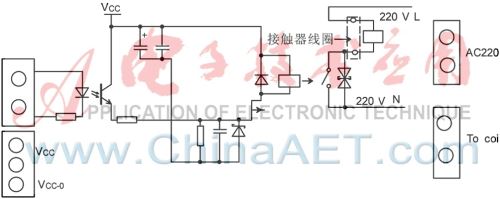
圖3 接觸器控制板的電路原理圖
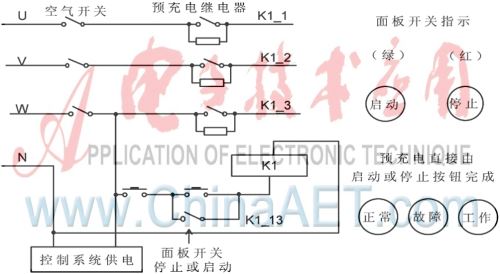
圖4 控制器總體控制圖
2.3 電壓傳感器板的設(shè)計(jì)
電壓傳感器板用于蓄電池電壓和中間電壓的檢測(cè),同時(shí)完成與其他傳感器的接口。電壓反饋采用LV25-P。測(cè)量蓄電池電壓:按220 V/10 mA設(shè)計(jì),輸出關(guān)系200 V-25 mA;測(cè)量中間直流環(huán)節(jié)電壓:按400 V/10 mA設(shè)計(jì),輸出關(guān)系400 V-25 mA。在F2812控制板中,對(duì)應(yīng)的采樣電阻降電流變換為3 V電壓,電阻大小為120.0 Ω。F2812控制板上的采樣電阻應(yīng)為精度在0.5%以上的高精度電阻,其最大功耗為25 mA×3 V=0.075 W,所以可采用0.5 W電阻。
2.4 網(wǎng)側(cè)濾波器電路的設(shè)計(jì)
網(wǎng)側(cè)采用形式為L(zhǎng)CL的T型濾波電路。靠近電網(wǎng)側(cè)的電感采用變壓器的漏感,濾波電容串接阻尼電阻接地。其示意圖如圖5所示。
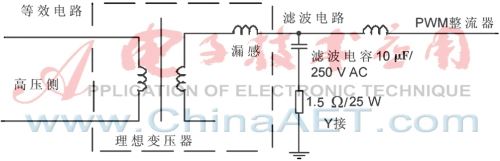
圖5 網(wǎng)側(cè)T型濾波電路圖
變壓器二次側(cè)線壓有效值為167 V,直流電壓為300 V。SVPWM各主要諧波隨調(diào)制比的增大而增大,6 kHz附近諧波幅值增大,諧波情況也更惡劣。因此電感值設(shè)計(jì)應(yīng)選擇在最大調(diào)制比處。
3 控制系統(tǒng)的軟件設(shè)計(jì)
本控制系統(tǒng)的軟件設(shè)計(jì)分為下位機(jī)軟件設(shè)計(jì)和上位機(jī)軟件設(shè)計(jì)兩大部分。
3.1 下位機(jī)軟件設(shè)計(jì)
下位機(jī)軟件主要包括以下模塊:DC/DC變換處理程序、電壓相序等中斷處理程序、功率保護(hù)處理程序、系統(tǒng)故障檢測(cè)與處理程序以及相關(guān)輔助器件等的控制程序等。其中主函數(shù)的設(shè)計(jì)流程圖如圖6所示。
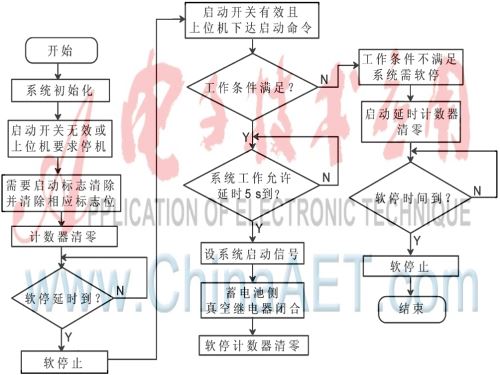
圖6 主函數(shù)流程圖
系統(tǒng)的初始化函數(shù)包括中斷初始化、I/O口初始化、工作初始化、外設(shè)初始化、用戶自定義程序初始化和中斷地址初始化。在主函數(shù)運(yùn)行前,必須完成系統(tǒng)的初始化工作。
網(wǎng)壓捕獲函數(shù)的軟件設(shè)計(jì)流程圖如圖7所示。
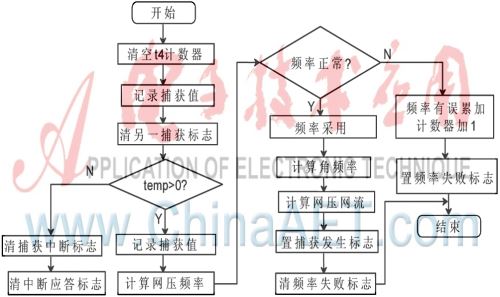
圖7 網(wǎng)壓捕獲函數(shù)流程圖
3.2 上位機(jī)軟件設(shè)計(jì)
整個(gè)上位機(jī)監(jiān)控系統(tǒng)主要包括電源監(jiān)控、參數(shù)設(shè)置以及工作輸出指示。而人機(jī)界面主要是對(duì)監(jiān)控系統(tǒng)的參數(shù)設(shè)置、模式設(shè)置等提供輸入,并通過(guò)LCD等顯示當(dāng)前的一些運(yùn)行狀態(tài)以及進(jìn)行操作指示。
蓄電池充放電裝置監(jiān)控系統(tǒng)上位機(jī)界面中顯示4臺(tái)蓄電池充放電裝置的輸出電壓/電流、已充放電次數(shù)等。
4 裝置試驗(yàn)及試驗(yàn)數(shù)據(jù)
試驗(yàn)前必須做好實(shí)驗(yàn)準(zhǔn)備,包括查線、相位檢測(cè)、變流單元檢查、整機(jī)檢查與上電準(zhǔn)備,確保儀器能正常、安全運(yùn)行。
實(shí)驗(yàn)分為空載實(shí)驗(yàn)、負(fù)載試驗(yàn)、放電試驗(yàn)和溫升試驗(yàn)四部分。在試驗(yàn)的基礎(chǔ)上,可以通過(guò)上位機(jī)監(jiān)測(cè),測(cè)得充電工況下輸出側(cè)的波形質(zhì)量分析數(shù)據(jù),如表1所示。
本文介紹了對(duì)機(jī)車蓄電池充放電檢測(cè)控制系統(tǒng)的設(shè)計(jì)與研究,并在整個(gè)控制系統(tǒng)的硬件設(shè)計(jì)和軟件設(shè)計(jì)的基礎(chǔ)上,完成了一款具有能量雙向流動(dòng)、網(wǎng)側(cè)電流正弦化、功率因數(shù)高、功率可靈活調(diào)控的檢測(cè)控制裝置。經(jīng)過(guò)測(cè)試,系統(tǒng)運(yùn)行穩(wěn)定,數(shù)據(jù)通信采用符合CAN2.0A/B協(xié)議的隔離的CAN總線接口,可靠性高。系統(tǒng)實(shí)際輸出電壓為109.988 V,輸出電壓穩(wěn)定度高,穩(wěn)定精度達(dá)到0.09%;紋波僅為0.85%,網(wǎng)側(cè)的功率因素接近1,而輸出電壓總諧波畸變小于僅為3.3,諧波污染小,具有良好的市場(chǎng)前景。
參考文獻(xiàn)
[1] 鄧木生,陳新喜,李華柏.基于PWM技術(shù)蓄電池充放電與檢測(cè)系統(tǒng)設(shè)計(jì)[J].現(xiàn)代電子技術(shù),2011(7):207-209.
[2] 胡沁春.正交小波變換的開(kāi)關(guān)電流電路實(shí)現(xiàn)[J].電子技術(shù)應(yīng)用,2013,39(10):36-38.
[3] 劉輝.基于雙閉環(huán)控制的三相三電平PWM整流器研究[J].工礦自動(dòng)化,2013,39(8):72-75.
[4] 劉洋,王海斌,趙紅,等.基于ARM9和CPLD的四導(dǎo)心音采集顯示系統(tǒng)的設(shè)計(jì)[J].電子技術(shù)應(yīng)用,2013,39(12):18-21.
[5] 盧建華,吳曉男,陳萬(wàn)勇,等.一種基于嵌入式平臺(tái)的原位測(cè)試設(shè)備研制[J].電子技術(shù)應(yīng)用,2013,39(10):91-94.
[6] 劉曉艷,盧健康,馬艷.PWM整流器直接功率控制系統(tǒng)的優(yōu)化設(shè)計(jì)[J].微特電機(jī),2013,41(3):48-51.
[7] 陳瑛,宋俊磊,王典洪.CAN總線在野外地震數(shù)據(jù)傳輸中的應(yīng)用[J].電子技術(shù)應(yīng)用,2013,39(9):34-37.
[8] 周國(guó)偉.基于雙閉環(huán)控制的電流型PWM整流器試驗(yàn)研究分析[J].電子世界,2013(5):45-47.
[9] 榮智林.基于三相PWM整流器的蓄電池充放電裝置研究[D].長(zhǎng)沙:中南林業(yè)科技大學(xué).2007.
[10] 霍艷,張全柱,楊太石.機(jī)車蓄電池檢測(cè)系統(tǒng)的地面分析軟件[J].蓄電池,2007(1):30-33.
(收稿日期:2014-03-03)
作者簡(jiǎn)介:
張敏三,男,1957年生,高級(jí)工程師,主要研究方向:電工電子、自動(dòng)化控制。
吳海波,男,1979年生,碩士,副教授,主要研究方向:計(jì)算機(jī)應(yīng)用、工業(yè)機(jī)器人。
