
摘?要:?針對傳統(tǒng)城市交通控制" title="交通控制">交通控制采用有線方式進行數(shù)據(jù)通信" title="數(shù)據(jù)通信">數(shù)據(jù)通信的缺點,提出基于GPRS網(wǎng)絡(luò)的城市交通控制數(shù)據(jù)通信系統(tǒng)。介紹了系統(tǒng)的工作原理,設(shè)計了具有GPRS功能的智能交通信號機" title="交通信號機">交通信號機,并給出了信號機應(yīng)用軟件和通信服務(wù)器" title="通信服務(wù)器">通信服務(wù)器軟件的實現(xiàn)流程。
關(guān)鍵詞:GPRS? ARM? 城市交通控制? 智能交通信號機? 數(shù)據(jù)通信
?
?
??? 數(shù)據(jù)通信系統(tǒng)是城市交通控制系統(tǒng)的重要組成部分之一,它通過數(shù)據(jù)采集、傳輸和管理技術(shù),使監(jiān)控中心能夠準(zhǔn)確地獲取路網(wǎng)各個路口的交通流量和交通信號機的運行狀態(tài),從而為保證路網(wǎng)的控制效果創(chuàng)造條件。因此,如何能夠快速、準(zhǔn)確、實時地將各個路口的交通流數(shù)據(jù)和交通信號機運行狀態(tài)上傳給監(jiān)控中心以及由監(jiān)控中心下傳控制指令給信號機就成了整個控制系統(tǒng)高效運行的重要環(huán)節(jié)。目前我國現(xiàn)有的城市交通控制系統(tǒng)網(wǎng)絡(luò)主要采用電話或?qū)S秒娎|等有線方式[1]進行數(shù)據(jù)通信,已不能滿足智能交通系統(tǒng)ITS[2]及各種智能車載移動終端數(shù)據(jù)通信的實時性和移動性要求。通用分組無線業(yè)務(wù)GPRS (General Packet Radio Service)作為一種高速、高效、經(jīng)濟的無線系統(tǒng),具有網(wǎng)絡(luò)覆蓋范圍廣、接入迅速、按流量計費、實時在線、沒有任何布線的優(yōu)點[3],特別適用于間斷的、突發(fā)性的或頻繁的、少量的數(shù)據(jù)傳輸,也適合短時的突發(fā)大數(shù)據(jù)量通信,完全滿足分布式的城市交通實時、多點交通信號機數(shù)據(jù)采集及監(jiān)控的雙向數(shù)據(jù)通信需求。本文采用32位ARM7TDMI核ARM微處理器S3C44BOX及GPRS模塊GR47,設(shè)計了具有GPRS功能的智能交通信號機,實現(xiàn)了基于GRPS網(wǎng)絡(luò)的城市交通控制數(shù)據(jù)通信系統(tǒng),基本上克服了傳統(tǒng)有線通信方式所造成的造價高、覆蓋范圍小、擴展性差等缺點。
1 系統(tǒng)組成及工作原理
基于GPRS網(wǎng)絡(luò)的城市交通控制數(shù)據(jù)傳輸系統(tǒng)是一個分布式、集散型、網(wǎng)絡(luò)化、全開放的監(jiān)控系統(tǒng),由監(jiān)控中心、GPRS/Internet通信網(wǎng)絡(luò)以及具有GPRS功能的路口智能交通信號機組成,如圖1所示。
?
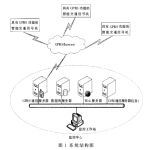
整個系統(tǒng)運行于客戶/服務(wù)器模式,監(jiān)控中心內(nèi)部通過以太網(wǎng)將通信服務(wù)器、數(shù)據(jù)庫服務(wù)器及監(jiān)控工作站等設(shè)備互連。監(jiān)控中心在軟件系統(tǒng)的控制下,實時接收處理來自各路口智能交通信號機的交通量信息、當(dāng)前工作狀態(tài)以及信號配時方案等各種數(shù)據(jù)[4],在監(jiān)控中心的LED多媒體顯示屏及中心監(jiān)控終端上顯示信號機位置、運行狀態(tài)及相關(guān)信息。同時,監(jiān)控中心的通信服務(wù)器也可以向各路口信號機下傳各種控制指令和優(yōu)化的信號配時參數(shù),實現(xiàn)對整個分布式智能交通信號機狀態(tài)的監(jiān)視和控制。通信服務(wù)器可以由已接入Internet的計算機擔(dān)當(dāng),完成TCP/UDP鏈路建立、維護、數(shù)據(jù)接收、存儲以及圖像的監(jiān)控等。
路口交通信號機為全自動智能設(shè)備,可以通過短信、數(shù)據(jù)有無檢測、響鈴、預(yù)設(shè)時間等多種方式啟動GPRS撥號程序接入Internet,主動與監(jiān)控中心的通信服務(wù)器建立TCP或UDP連接,并向通信服務(wù)器傳輸數(shù)據(jù)或圖像,實現(xiàn)城市交通信號的數(shù)據(jù)傳輸。
2 智能交通信號機的硬件構(gòu)成
具有GPRS功能的智能交通信號機主要由ARM微處理器模塊、GRPS無線通信模塊、存儲模塊、電源晶振模塊、交通信號機以及JTAG調(diào)試接口等模塊組成,其結(jié)構(gòu)框圖如圖2所示。
?

2.1 ARM微處理器模塊
ARM微處理器模塊是智能交通信號機的控制核心,負(fù)責(zé)交通信號機的數(shù)據(jù)采集、存儲處理數(shù)據(jù)、GPRS通信等工作。根據(jù)智能交通信號機低功耗的要求,選用三星公司的S3C44BOX[5]。它是一款基于ARM7TDMI內(nèi)核精簡指令系統(tǒng)的32位高速處理器,工作在66MHz,支持Thumb(16位)/ARM(32位)雙指令集,能很好地兼容8位/16位器件,具有性價比高、功耗低、體積小、可靠性高等特點。S3C44BOX提供了對兩個串口Uart0和Uartl的直接支持。在本系統(tǒng)中,一個串口用于與GR47模塊通信,同時在調(diào)試應(yīng)用程序時需要另一個串口與PC機相連,以保證程序正常運行。
2.2 GPRS無線通信模塊
GPRS無線通信模塊是整個系統(tǒng)的通信基礎(chǔ),采用Sony-Ericsson公司的可編程無線通信模塊GR47[6],它提供RS232口,可以用AT指令進行控制。GR47具有GPRS和SMS兩種無線數(shù)據(jù)傳輸通道,可以快速、安全、可靠地實現(xiàn)數(shù)據(jù)傳輸、語音傳輸、短消息服務(wù),可以工作在900MHz和1800MHz兩個頻段。在GPRS網(wǎng)絡(luò)狀態(tài)良好的情況下,優(yōu)先通過GPRS通信方式將智能交通信號機所在位置、交通流以及運行狀態(tài)等信息傳輸?shù)奖O(jiān)控中心并接收來自監(jiān)控中心的指令。與此同時,GR47不斷輪回檢查GPRS網(wǎng)絡(luò)狀態(tài),當(dāng)出現(xiàn)網(wǎng)絡(luò)擁塞、GPRS未覆蓋或者中心工作人員誤操作導(dǎo)致TCP/IP" title="TCP/IP">TCP/IP連接斷開時,會立刻切換到SMS方式直至TCP/IP重新連接上。
2.3 存儲模塊
FLASH存儲器存放系統(tǒng)啟動代碼、嵌入式操作系統(tǒng)、文件系統(tǒng)、應(yīng)用程序的代碼或其他在系統(tǒng)掉電后需要保護的用戶數(shù)據(jù)等。選用SST公司16位數(shù)據(jù)帶寬的SST39VF160,它具有2MB的存儲容量,工作電壓為2.7V~3.6V,其地址線A0~A20分別與S3C44BOX的地址線ADDR1~ADDR2相連。SDRAM存儲器是系統(tǒng)運行時的主要區(qū)域,系統(tǒng)及用戶數(shù)據(jù)、堆棧均位于SDRAM存儲器中,其存儲速度大大高于FLASH存儲器,且具有讀/寫的屬性。
2.4 電源、晶振模塊
電源電路由3塊DC-DC轉(zhuǎn)換器(9V~5V,5V~3.3V,5V~2.5V)組成,分別給外圍電路、CPU的I/O和S3C44BOX內(nèi)核供電。10MHz晶振為系統(tǒng)提供工作時鐘,通過片內(nèi)PLL電路倍頻為66MHz作為微處理器的工作時鐘。
2.5 交通信號機
交通信號機是交通控制系統(tǒng)的重要組成部分。它在ARM微處理器S3C44BOX的協(xié)調(diào)下執(zhí)行監(jiān)控中心下傳的控制指令如關(guān)燈、閃光、全紅、手動步進等,也可以在無中心控制的條件下進行信號機單點自主時段控制。信號機運行時可連續(xù)、準(zhǔn)確地采集大量現(xiàn)場交通數(shù)據(jù),并將現(xiàn)場數(shù)據(jù)實時地傳輸?shù)奖O(jiān)控中心,監(jiān)控中心通過對交通數(shù)據(jù)的采集、存儲和處理,不僅可以直接用于交通控制,還可以為交通指揮調(diào)度和城市交通規(guī)劃提供準(zhǔn)確科學(xué)的量化依據(jù)。智能交通信號機采用芯片16C550實現(xiàn)數(shù)據(jù)的串/并擴展,其8根數(shù)據(jù)線D0~D7連接到微處理器S3C44BOX對應(yīng)的D0~D7,交通信號機通過MAX232標(biāo)準(zhǔn)串口與微處理器實現(xiàn)雙向高速數(shù)據(jù)交換。
3 軟件實現(xiàn)
3.1 智能交通信號機應(yīng)用軟件設(shè)計
智能交通信號機應(yīng)用軟件主要由主程序和GR47無線通信等功能模塊組成。主程序主要完成系統(tǒng)初始化(包括定時器初始化、串口初始化、端口初始化等)、交通信號機數(shù)據(jù)的讀取以及與GR47無線通信等。GR47無線通信模塊主要完成通信模塊初始化、分組數(shù)據(jù)協(xié)議PDP(Packet Data Protocol)的上下文激活、TCP/IP建立連接、GPRS數(shù)據(jù)讀取/發(fā)送、SMS讀取/發(fā)送、GRPS網(wǎng)絡(luò)狀態(tài)檢測等處理。在應(yīng)用軟件的開發(fā)過程中,采用C語言和匯編語言混合編程,選用ARM ADS(ARM Developer Suite)集成開發(fā)工具。源程序在PC機通過編輯、交叉編譯、交叉鏈接生成ELF格式的目標(biāo)映像后,最后通過JTAG接口將目標(biāo)映像下載到目標(biāo)開發(fā)板上的FLASH中。軟件流程如圖3所示。
?

GPRS數(shù)據(jù)傳輸是GR47模塊的核心功能,在通過GPRS網(wǎng)絡(luò)進行TCP/IP連接之前,先要在GR47模塊內(nèi)部建立一個數(shù)據(jù)帳戶,指出正確的接入服務(wù)商APN名稱。智能交通信號機利用固化在FLASH存儲器中的GRPS通信服務(wù)器IP地址訪問監(jiān)控中心的通信服務(wù)器,可通過AT+CGDCONT指令實現(xiàn),例如:AT+CGDCONT=1,“IP”,“CMNET”。
3.2 GPRS通信服務(wù)器軟件設(shè)計
監(jiān)控中心通信服務(wù)器的主要功能在于實現(xiàn)智能交通信號機和監(jiān)控中心(數(shù)據(jù)庫服務(wù)器以及監(jiān)控工作站)之間的通信。通信服務(wù)器為監(jiān)控中心提供內(nèi)部以太網(wǎng)的接口并監(jiān)控網(wǎng)絡(luò)的通信狀況,支持TCP/IP協(xié)議和PPP協(xié)議。通信服務(wù)器軟件采用WinSocket編程,主要創(chuàng)建三種Socket類,即監(jiān)聽Socket(CListenSocket)、數(shù)據(jù)接收與處理Socket類(CServerSocket)和局域網(wǎng)內(nèi)通信Socket類(CUDPSocket)。CListSocket定時監(jiān)聽相應(yīng)的端口,接收智能交通信號機的連接請求,創(chuàng)建一個Socket線程并完成TCP鏈路的建立與維護,配合ADO數(shù)據(jù)庫技術(shù)實現(xiàn)數(shù)據(jù)接收、存儲及監(jiān)控等功能,然后把原始套接字放回監(jiān)聽狀態(tài)繼續(xù)監(jiān)聽。對于每一個智能交通信號機,都需要有一個接收線程來處理數(shù)據(jù)的接收。因此,需要在內(nèi)存中建立一個動態(tài)表,以維護數(shù)據(jù)接收線程句柄和智能交通信號機之間的對應(yīng)關(guān)系。產(chǎn)生的新線程中包含CServerSocket,負(fù)責(zé)數(shù)據(jù)接收、處理和發(fā)送工作。整個通信服務(wù)器軟件結(jié)構(gòu)如圖4所示。
?

通過在實驗車輛上安裝該智能交通信號機,實現(xiàn)GPRS網(wǎng)絡(luò)與通信服務(wù)器的實時通信與控制,本系統(tǒng)運行穩(wěn)定,系統(tǒng)響應(yīng)時間 2s。本系統(tǒng)采用GPRS無線接入方式,設(shè)計了智能交通信號機,實現(xiàn)了城市交通控制數(shù)據(jù)通信,解決了傳統(tǒng)的有線通信方式在網(wǎng)絡(luò)覆蓋范圍、擴展性、實時性和可靠性等方面的問題,降低了運營成本,會有廣泛的市場應(yīng)用前景。
2s。本系統(tǒng)采用GPRS無線接入方式,設(shè)計了智能交通信號機,實現(xiàn)了城市交通控制數(shù)據(jù)通信,解決了傳統(tǒng)的有線通信方式在網(wǎng)絡(luò)覆蓋范圍、擴展性、實時性和可靠性等方面的問題,降低了運營成本,會有廣泛的市場應(yīng)用前景。
參考文獻
[1] 楊佩昆,吳兵.交通管理與控制(第二版)[M]. 北京: 人民交通出版社, 2003.
[2] ?岳航,楊榮杰. 智能交通系統(tǒng)的發(fā)展及其共用信息平臺的建設(shè)[J]. 武漢理工大學(xué)學(xué)報(交通科學(xué)與工程版),
?2005,29(4):560-563.
[3] ?鐘子果,楊品露,胡愛群. 基于GPRS移動通信網(wǎng)絡(luò)數(shù)據(jù)傳輸系統(tǒng)的研究與實現(xiàn)[J].移動通信,2005,29(4):82-86.
[4] ?陳小鋒,史忠科,趙凱. 基于PSTN網(wǎng)的交通控制系統(tǒng)數(shù)據(jù)通信方案設(shè)計及實現(xiàn)[J]. 計算機工程與應(yīng)用, 2003,
?39(29):218-221.
[5] ?陳猛,趙繼敏.ARM CPU S3C440BOX與C54X DSP的接口設(shè)計[J]. 電子技術(shù)應(yīng)用, 2003,29(3):15-17.
[6] ?王松宏,李德化.基于GPRS的車輛監(jiān)控系統(tǒng)車載移動終端的設(shè)計[J].計算機應(yīng)用研究,2005,22(6):184-186.