
引言
嬰兒培養(yǎng)箱主要應(yīng)用于早產(chǎn)兒、低體重兒、病危兒或發(fā)育不良的新生兒的臨床醫(yī)療。在兒科的醫(yī)療護(hù)理中占有重要地位,是醫(yī)院不可或缺的醫(yī)療器械[1][2]。由于此類嬰兒的特殊性,所以嬰兒培養(yǎng)箱對控制精度、穩(wěn)定性能和安全性都有較高要求。現(xiàn)今市場上的嬰兒培養(yǎng)箱大多采用傳統(tǒng)的PID算法。常規(guī)PID算法是過程控制中應(yīng)用最為廣泛的一種基本控制規(guī)律,具有穩(wěn)定性高、魯棒性好等優(yōu)點。但其對時變非線性系統(tǒng)來說控制就難以達(dá)到很好的效果。本文采用模糊PID算法對嬰兒培養(yǎng)箱的溫度加以控制,系統(tǒng)的動靜態(tài)特性得到進(jìn)一步改善。
1 嬰兒培養(yǎng)箱溫度控制系統(tǒng)的設(shè)計
本系統(tǒng)利用單片機(jī)技術(shù)對培養(yǎng)箱溫度實施伺服控制,開機(jī)即可自動進(jìn)入箱溫控制狀態(tài)。溫度控制監(jiān)測儀是儀器的核心部件,具有溫度設(shè)置,實時溫度監(jiān)測等功能。系統(tǒng)組成框圖如圖1所示:
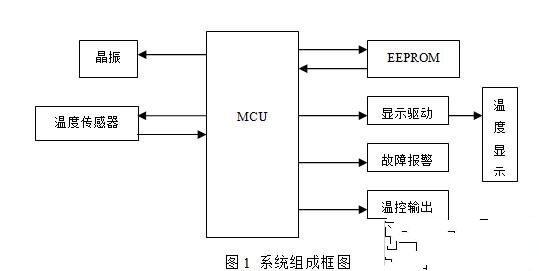
嬰兒培養(yǎng)箱內(nèi)的空氣溫度具有延遲性,從檢測到箱內(nèi)溫度小于設(shè)定值到加熱器開始加熱,箱內(nèi)溫度會持續(xù)降低一段時間,當(dāng)加熱停止時,溫度并不會馬上停止上升而是上升一段時間后才停止。因此,嬰兒培養(yǎng)箱內(nèi)的溫度一直在上下波動。采用模糊自適應(yīng)PID控制可以較好的解決此類問題,微分控制分量可以改善系統(tǒng)的動態(tài)特性,而積分控制分量可以減少系統(tǒng)靜差。
2系統(tǒng)的硬件結(jié)構(gòu)
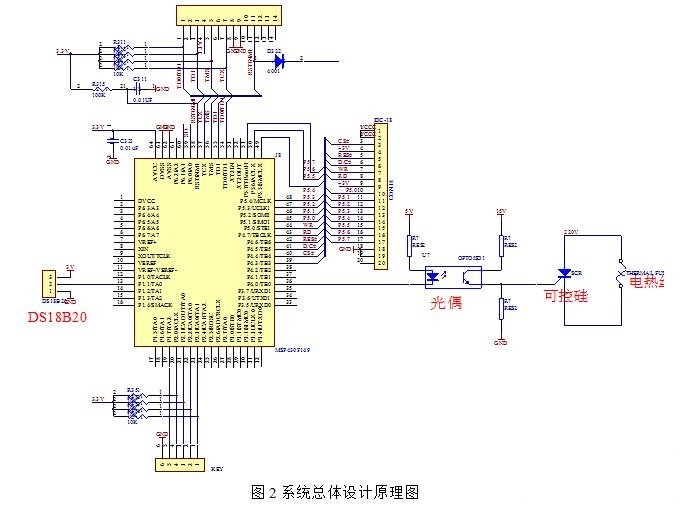
本系統(tǒng)硬件結(jié)構(gòu)控制芯片選用16位低功耗MSP430系列單片機(jī)[3][4],采用DS18B20溫度傳感器將嬰兒培養(yǎng)箱的溫度測量值通過單線傳入單片機(jī)I/O口,與傳統(tǒng)的熱敏電阻相比,它能夠直接讀出被測溫度,并且可根據(jù)實際要求通過編程實現(xiàn)9~12 位的數(shù)字值讀數(shù)方式;可以分別在93. 75 ms 和750 ms 內(nèi)完成9 位和12 位的數(shù)字量。溫度測量值在單片機(jī)內(nèi)部經(jīng)過模糊自適應(yīng)PID運算后,輸出控制信號給光耦離合器,以實現(xiàn)輸入信號和輸出信號的隔離,減少干擾,和實現(xiàn)信號的放大。放大后的信號用于控制可控硅,從而實現(xiàn)對加熱絲工作與否的控制。通過鍵盤和液晶顯示分別實現(xiàn)對溫度值進(jìn)行標(biāo)定,定時顯示溫度值,設(shè)定上下限報警值等功能。具體電路如圖2所示。
3軟件設(shè)計
軟件設(shè)計主要采用自適應(yīng)模糊PID控制方法[5][6][7][8]。模糊控制是一種以模糊控制論、模糊語言變量及模糊邏輯推理為基礎(chǔ)的新型計算機(jī)智能控制。與傳統(tǒng)的PID算法相結(jié)合形成了模糊自適應(yīng)控制理論,運用模糊推理實現(xiàn)PID參數(shù)的自動調(diào)整。
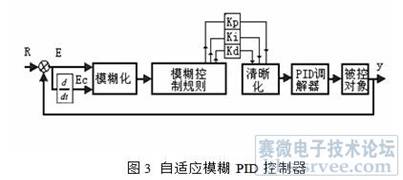
自適應(yīng)模糊PID控制器以誤差E和誤差變化Ec作為輸入,可以滿足不同時刻偏差E和偏差變化率Ec對PID參數(shù)自整定的要求。利用模糊控制規(guī)則在線對PID參數(shù)進(jìn)行修改,便構(gòu)成了自適應(yīng)模糊PID控制器,如圖3所示。
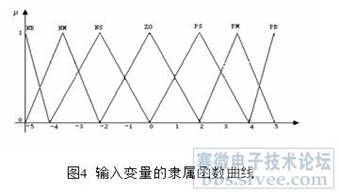
設(shè)定輸入變量E和Ec語言值的模糊子集為{負(fù),負(fù)中, 負(fù)小, 零, 正小, 正中, 正大}, 并簡記為{NB,NM, NS, ZO, PS, PM, PB}, 將誤差E 和誤差變化率Ec 量化到( - 5, 5) 的區(qū)域內(nèi),輸入變量的隸屬函數(shù)曲線如圖4所示。同樣, 設(shè)計輸出量KP、KI和KD的模糊子集為{ZO, PS, PM, PB}, 并分別將其量化到區(qū)域( 0, 3) ,(0,0.2),(0,0.8)內(nèi)。
根據(jù)參數(shù)KP、KI和KD對系統(tǒng)輸出特性的影響情況,根據(jù)實驗經(jīng)驗總結(jié)得到KP、KI和KD的控制規(guī)則表,見表1,表2和表3,它反映和描述了以往嬰兒培養(yǎng)箱在不同條件和要求下的控制經(jīng)驗和知識,是模糊推理的規(guī)則集。
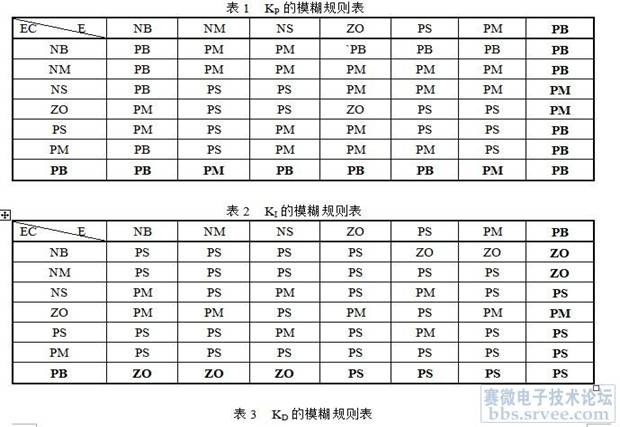

根據(jù)規(guī)則表結(jié)合嬰兒培養(yǎng)箱控制的規(guī)律,對PID參數(shù)KP總結(jié)出下列49條模糊控制規(guī)則:
if E=NB and EC=NB, then KP=PB
if E=NB and EC=NM, then KP =PB
┇
if E=PB and EC=PB, then KP=PB
E、EC為模糊輸入變量,KP為模糊輸出變量;NB、PB,NM等為論域上的模糊集。
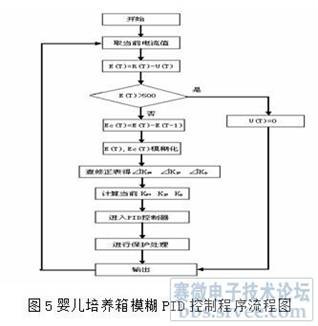
模糊PID控制器的工作流程圖如圖5所示,圖中U(T)是當(dāng)前溫度采樣值,E(T)、E(T-1)分別為當(dāng)前誤差和上次采樣誤差,Ec (T)為當(dāng)前誤差變化率,U(T)是PID運算結(jié)果。
4 實驗結(jié)果
為提高加溫系統(tǒng)的安全性,一般采取較小功率長時間加溫的方法。在環(huán)境溫度為26℃,環(huán)境濕度60%RH的情況下,將嬰兒培養(yǎng)箱的箱溫設(shè)定為32℃,嬰兒培養(yǎng)箱分別采用常規(guī)PID與模糊PID兩種方法控制其溫度,測量將其箱溫設(shè)定在32℃時的效果,在一個周期內(nèi)使用模糊PID控制的相應(yīng)速度比傳統(tǒng)PID縮短了約3分鐘,控制效率提高34%,而且控制穩(wěn)定后的溫度峰峰值為0.3度,傳統(tǒng)PID控制為0.5度。結(jié)果曲線對比如圖5所示:
1 PID control 2.Fuzzy PID control
5結(jié)論
采用模糊 PID控制嬰兒培養(yǎng)箱的箱溫,在控制過程中模糊 PID 控制器根據(jù)系統(tǒng)的實際狀態(tài)實時調(diào)整 PID參數(shù)。從實驗結(jié)果可以看出,采用模糊PID控制的嬰兒培養(yǎng)箱,可以使系統(tǒng)的過渡時間及超調(diào)量能盡可能減少,升溫速度較快,改善了系統(tǒng)的穩(wěn)定度,提高了抗干擾性能,收到了良好的預(yù)期效果。