
1 引言
日立igbt整流器是一種電壓型pwm整流器,,具有能量雙向流動(dòng),、恒定直流電壓控制,以及高功率因數(shù)控制(cosφ≈1.0)等特點(diǎn),。使用該類型整流器除了實(shí)現(xiàn)高功率因數(shù)節(jié)省電能外,,還能夠減少電網(wǎng)諧波,省去電網(wǎng)側(cè)無功補(bǔ)償svc裝置,。
2 高功率因數(shù)的控制方法
2.1 pwm整流器的組成及工作原理
pwm整流器主回路一般采用二電平pwm整流電路或三電平pwm整流電路,,主回路元件采用igbt元件,pwm整流器的工作原理與pwm逆變器的工作原理一樣,,按照正弦參考波和三角載波進(jìn)行比較的方法對igbt元件進(jìn)行pwm控制,,在整流器交流輸入端產(chǎn)生pwm電壓vc,其基波的頻率與正弦參考波一致,,幅值與正弦參考波成比例,。
改變整流器輸出電壓vc的基波幅值和相位,就可以使is和vs同相位,、反相位,、is比vs超前90°、以及is比vs超前/滯后某一所需要的角度,。因此,,整流器在理論上可以有4種運(yùn)行方式:整流運(yùn)行、逆變運(yùn)行,,純靜態(tài)無功補(bǔ)償運(yùn)行以及is超前/滯后任意角度運(yùn)行,。
在實(shí)際應(yīng)用中,整流器主要工作在整流運(yùn)行狀態(tài)和逆變運(yùn)行狀態(tài),。
電壓型pwm整流器控制方框圖組成如圖1所示,。

這是一種采用電壓外環(huán)、電流內(nèi)環(huán)結(jié)構(gòu)的控制系統(tǒng),。
電壓外環(huán)(avr)起控制和穩(wěn)定整流器輸出直流電壓的作用,,在負(fù)載或電網(wǎng)波動(dòng)時(shí),通過反饋電壓和指令電壓比較控制,,保證輸出直流電壓與指令一致,。avr一般采用比例積分pi環(huán)節(jié)。avr的輸出作為整流器電流內(nèi)環(huán)的有功電流的給定(iq*),。
電流內(nèi)環(huán)(acr)有兩個(gè)直流電流調(diào)節(jié)環(huán),,一個(gè)用于q軸有功電流分量的控制,一個(gè)用于d軸無功電流分量的控制,。前者的電流給定iq*是電壓控制avr的輸出,,后者的電流給定id*是0(因?yàn)榭刂颇繕?biāo)為cosφ≈1.0)。三相實(shí)際電流ir、is,、it經(jīng)過3/2坐標(biāo)變換和旋轉(zhuǎn)變換后得到的有功電流iq和無功電流id作為相應(yīng)的電流反饋,。而兩個(gè)直流電流調(diào)節(jié)環(huán)的輸出vq*、vd*用于pwm控制,。
負(fù)荷補(bǔ)償功能主要是考慮逆變器負(fù)荷變化時(shí),,為了保持電容器上直流電壓vdc的穩(wěn)定,應(yīng)根據(jù)逆變器負(fù)荷變化情況對整流器iq分量進(jìn)行相應(yīng)地補(bǔ)償,。
1 引言
日立igbt整流器是一種電壓型pwm整流器,,具有能量雙向流動(dòng)、恒定直流電壓控制,,以及高功率因數(shù)控制(cosφ≈1.0)等特點(diǎn),。使用該類型整流器除了實(shí)現(xiàn)高功率因數(shù)節(jié)省電能外,還能夠減少電網(wǎng)諧波,,省去電網(wǎng)側(cè)無功補(bǔ)償svc裝置,。
2 高功率因數(shù)的控制方法
2.1 pwm整流器的組成及工作原理
pwm整流器主回路一般采用二電平pwm整流電路或三電平pwm整流電路,主回路元件采用igbt元件,,pwm整流器的工作原理與pwm逆變器的工作原理一樣,,按照正弦參考波和三角載波進(jìn)行比較的方法對igbt元件進(jìn)行pwm控制,在整流器交流輸入端產(chǎn)生pwm電壓vc,,其基波的頻率與正弦參考波一致,,幅值與正弦參考波成比例。
改變整流器輸出電壓vc的基波幅值和相位,,就可以使is和vs同相位,、反相位、is比vs超前90°,、以及is比vs超前/滯后某一所需要的角度,。因此,整流器在理論上可以有4種運(yùn)行方式:整流運(yùn)行,、逆變運(yùn)行,,純靜態(tài)無功補(bǔ)償運(yùn)行以及is超前/滯后任意角度運(yùn)行。
在實(shí)際應(yīng)用中,,整流器主要工作在整流運(yùn)行狀態(tài)和逆變運(yùn)行狀態(tài),。
電壓型pwm整流器控制方框圖組成如圖1所示。
這是一種采用電壓外環(huán),、電流內(nèi)環(huán)結(jié)構(gòu)的控制系統(tǒng),。
電壓外環(huán)(avr)起控制和穩(wěn)定整流器輸出直流電壓的作用,在負(fù)載或電網(wǎng)波動(dòng)時(shí),,通過反饋電壓和指令電壓比較控制,,保證輸出直流電壓與指令一致,。avr一般采用比例積分pi環(huán)節(jié)。avr的輸出作為整流器電流內(nèi)環(huán)的有功電流的給定(iq*),。
電流內(nèi)環(huán)(acr)有兩個(gè)直流電流調(diào)節(jié)環(huán),一個(gè)用于q軸有功電流分量的控制,,一個(gè)用于d軸無功電流分量的控制,。前者的電流給定iq*是電壓控制avr的輸出,后者的電流給定id*是0(因?yàn)榭刂颇繕?biāo)為cosφ≈1.0),。三相實(shí)際電流ir,、is、it經(jīng)過3/2坐標(biāo)變換和旋轉(zhuǎn)變換后得到的有功電流iq和無功電流id作為相應(yīng)的電流反饋,。而兩個(gè)直流電流調(diào)節(jié)環(huán)的輸出vq*,、vd*用于pwm控制。
負(fù)荷補(bǔ)償功能主要是考慮逆變器負(fù)荷變化時(shí),,為了保持電容器上直流電壓vdc的穩(wěn)定,,應(yīng)根據(jù)逆變器負(fù)荷變化情況對整流器iq分量進(jìn)行相應(yīng)地補(bǔ)償。
2.2 功率因數(shù)為1.0的控制方法
所謂高功率因數(shù)控制,,就是將功率因數(shù)控制到1.0,。
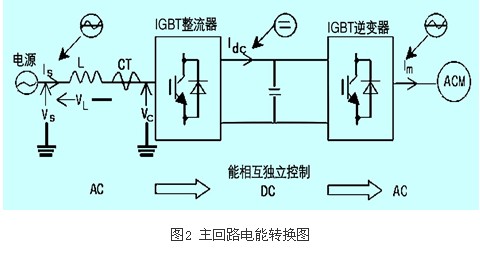
鑒于整流器和逆變器相互之間是分別獨(dú)立運(yùn)行的,它們是分別獨(dú)立可控的,,能對整流器的功率因數(shù)進(jìn)行獨(dú)立控制,,而不受馬達(dá)負(fù)荷及運(yùn)轉(zhuǎn)速度的影響,如圖2所示,。
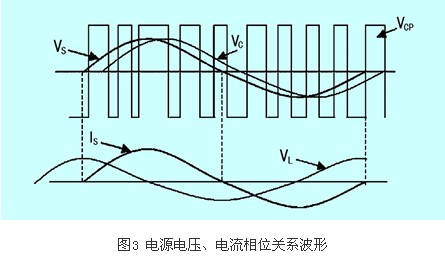
功率因數(shù)控制到1.0實(shí)際上就是設(shè)法使電源電流is與電壓vs同相位,。因此,只要讓調(diào)制正弦參考波落后電網(wǎng)電壓vs一個(gè)角度,,整流器網(wǎng)側(cè)輸出的pwm電壓vcp的基波分量vc落后于vs,,使電流is與電壓vs同相,整流器工作在整流狀態(tài),,而且功率因數(shù)控制在1.0,,如圖3所示。
那么vc如何來引導(dǎo)is的相位呢,?
首先,,從圖2可知道整流器輸入端電壓關(guān)系:vs=vc+vl 。
忽略變壓器電阻r不計(jì),,則電感電壓為vl=j(luò)ωlis,,所以vl與is相位是固定的,始終相差90°,。在電網(wǎng)電壓vs一定的情況下,,is的幅值和相位僅由矢量vc的幅值及其與vs的相位差來決定,,因此只要改變矢量vc就可以相應(yīng)改變is,使is與vs同相位,,實(shí)現(xiàn)功率因數(shù)控制到1.0的目的,。
那么改變vc到什么程度才能實(shí)現(xiàn)is與vs同相位呢?
我們可以畫出有關(guān)電壓和電流的矢量圖,,如圖4,。

根據(jù)圖4可以知道,要把整流器的功率因數(shù)控制在1.0的話,,只要把無功電流設(shè)定值設(shè)為0(id﹡=0),,通過整流器控制系統(tǒng)調(diào)節(jié)改變輸出電壓vc的大小和相位,使實(shí)際無功電流分量id=0,,那么is=iq+id=iq,,is就能與vs保持在同相位,功率因數(shù)控制到了1.0,。
當(dāng)電動(dòng)機(jī)減速制動(dòng)時(shí),,從逆變器返回再生能量使直流電壓升高,此時(shí)整流器處于再生逆變狀態(tài),,把再生能量回饋到電網(wǎng),,保持直流電壓穩(wěn)定。
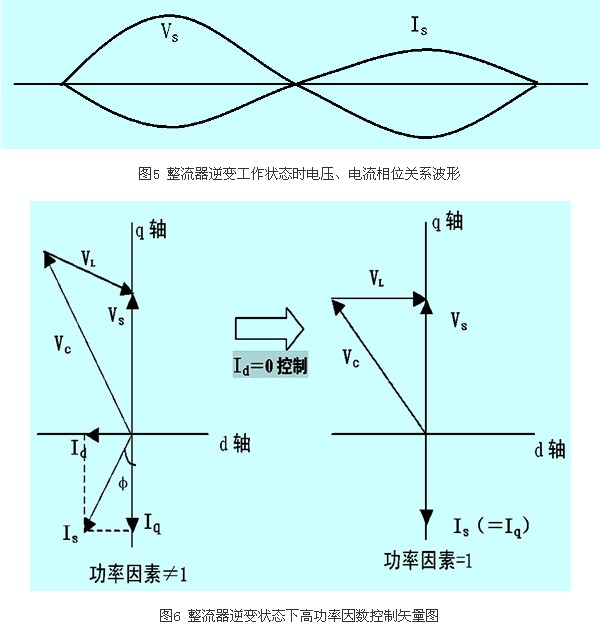
我們希望整流器不論是工作在整流狀態(tài)還是逆變狀態(tài)其功率因素都等于1.0,,因此整流器工作在逆變狀態(tài)時(shí),,只要做到is與vs的相位是反相的,功率因數(shù)同樣可控制在1.0,,這時(shí)能量是往電網(wǎng)方向流動(dòng)的,。如圖5和圖6所示。
3 ct異常對整流器的影響
整流器中電流檢測元件采用的是nnc系列有源電流互感器(簡稱ct),,整流器中使用ct情況如圖7所示,。

ct的好壞直接影響到整流器實(shí)際電流的檢測,也直接關(guān)系整流器控制的好壞,。ct的異常一般表現(xiàn)為兩種情況,,一種是ct損壞檢測不到電流(即電流檢測為0),另一種是ct檢測產(chǎn)生衰減(即電流檢測偏?。?,通常第一種情況發(fā)生的概率較大。但不管是哪種情況,,都會(huì)引起整流器工作不正常,。
整流器正常工作時(shí),r,、s,、t三相電流是互相對稱的,,即三相幅值一樣,相位將互差120°,,而且任何時(shí)刻要保持三相電流之和為0,,即ir+is+it=0,日立稱之為電流平衡控制,。當(dāng)系統(tǒng)中某處有漏電產(chǎn)生時(shí),,ir+is+it≠0,起到監(jiān)控報(bào)警作用,。
如果ct損壞檢測不到電流(即電流檢測為0,例如r相電流ir=0),,由于電流給定是一直存在的,,則因?yàn)橄嚯娏髡{(diào)節(jié)器的作用,r相電流會(huì)越來越大,,直到過流跳電或dc過壓跳電(如果dc電壓先起作用的話),。
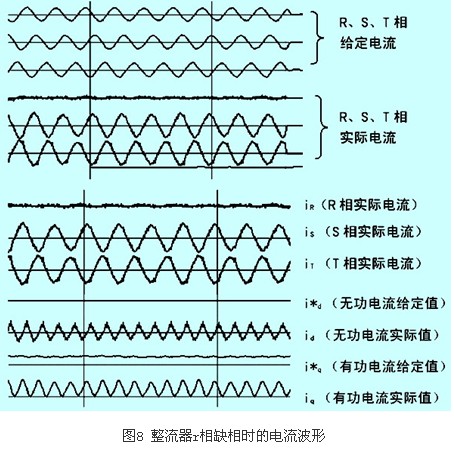
如果由于線路缺相,ct也檢測不到電流(例如r相電流ir=0),,則由于平衡控制會(huì)使另外兩相電流的相位差變?yōu)?80°,,幅值相等(當(dāng)然為補(bǔ)償“缺相”的那相電流,另兩相電流將增大),,以滿足矢量和為零的控制要求,,如圖8所示。此時(shí),,根據(jù)r,、s、t相實(shí)際電流計(jì)算出的有功分量電流iq和無功分量電流id已經(jīng)不是正常直流量,,而是含有2倍頻(相電流頻率)成份的交流量,,參見圖8,整流器無法正常工作,。
如果ct檢測有衰減,,則由于相電流調(diào)節(jié)器的作用,r相實(shí)際電流會(huì)偏大,,但此時(shí)整流器里的控制和顯示的r相電流值還是與給定值一致的,,整流器控制系統(tǒng)本身并不能判斷出該ct有問題。例如在ct正常時(shí),,整流器r相實(shí)際電流為1000a時(shí),,ct檢測輸出10v,而當(dāng)ct有衰減時(shí),,同樣1000a的電流ct輸出只有9.5v,,由于電流調(diào)節(jié)器的作用,,最終結(jié)果要把電流調(diào)節(jié)到“10v”,對應(yīng)的實(shí)際電流為10v/9.5v×1000a=1053a,。但ct和控制系統(tǒng)仍然認(rèn)為整流器r相實(shí)際電流為1000a,。
小電流測量的ct有異常時(shí),可以通過測試來判斷,。但對于大電流ct(例如5000a),,由于沒有專用的設(shè)備,現(xiàn)場一般很難判斷其好壞,,這方面問題有待于我們研究和解決,。
4 結(jié)束語
igbt高功率因數(shù)整流器在現(xiàn)場已經(jīng)得到了廣泛應(yīng)用,效果良好,,系統(tǒng)運(yùn)行穩(wěn)定,,操作維護(hù)方便。由于igbt高功率因數(shù)整流器的應(yīng)用,,保證了電網(wǎng)側(cè)輸入功率因數(shù)接近于1.0,,有效降低了諧波對電網(wǎng)的影響。