
1 引言
礦用電機車是煤礦工業(yè)的重要運輸工具。由于煤礦井下的工作環(huán)境十分惡劣,對電機車的電氣驅(qū)動系統(tǒng)要求很高。然而,當前礦用電機車采用結(jié)構(gòu)復(fù)雜、造價昂貴、故障率高、維修費用大的直流電機驅(qū)動,調(diào)速系統(tǒng)還是采用的原始落后的電阻降壓調(diào)速方式,這種多級觸頭變阻調(diào)速器常因觸頭產(chǎn)生較強火花而燒損,所以維修量大。同時,電機車帶電阻運行導(dǎo)致電能浪費很大。對于高瓦斯礦井,普遍采用防爆型蓄電池電機車作為運輸材料和矸石的工具。多年來,蓄電池電機車一直采用直流電動機串電阻調(diào)速方式,從而使20~25%的電能消耗在電阻上,造成電能的浪費。特別是蓄電池電機車,由于電能消耗過快,使蓄電池的充電間隔縮短,蓄電池壽命減少。近幾年來,隨著科學(xué)技術(shù)的發(fā)展,交流電機的調(diào)速問題已經(jīng)獲得圓滿的解決。交流電機的調(diào)速系統(tǒng)不但性能同直流電機的性能一樣,而且成本和維護費比直流電機系統(tǒng)更低,可靠性更高。用交流電動機取代直流電動機進行調(diào)速勢在必行,并且交流電動機有著直流電動機無法比擬的優(yōu)勢。由于直流調(diào)速帶有電阻器運行,電能消耗較大,交流變頻調(diào)速由于不用高耗能的電阻,節(jié)電率可達35%。如果電機車設(shè)置成再生回饋制動,可以利用電機車減速或下坡時將電機發(fā)出的電能回饋給蓄電池,這樣可以大大節(jié)約電能,延長充電時間。
2 異步電動機的四象限特性及能量再生
三相交流異步電機傳動系統(tǒng)具有結(jié)構(gòu)簡單、工作可靠、造價低廉,效率高,節(jié)約能源等優(yōu)點,因而被廣泛用語蓄電池電機車的改造工程中。
由于礦用電機車工作于井下惡劣的環(huán)境中,調(diào)速系統(tǒng)處于頻繁的起動、制動、加減速等狀態(tài),這樣一來,我們就能充分利用三相交流異步電動機的四象限特性進行調(diào)速制動:第一象限和第三象限是電動機的運行狀態(tài),分別為正、倒轉(zhuǎn);第二象限和第四象限是電動機的發(fā)電狀態(tài),分別為正、倒轉(zhuǎn)。由于蓄電池電機車采用的是直接轉(zhuǎn)矩的方式進行變頻調(diào)速。
電機車在減速運行過程或急剎車時都將發(fā)生能量再生。先假定三相異步電動機定子繞組中通以三相電流,極性為i1a>0、i1b<0、i1c<0(下標:“1”表示定子,“2”表示轉(zhuǎn)子,字母上加點表示向量),該電流將在電動機氣隙內(nèi)形成按正弦規(guī)律分布,并以同步轉(zhuǎn)速旋轉(zhuǎn)的磁動勢f1,如圖1。f1先建立氣隙主磁場bm(фm),bm是個旋轉(zhuǎn)磁場。當變頻器驅(qū)動異步電動機減速運行時,旋轉(zhuǎn)磁場同步轉(zhuǎn)速no總是先于轉(zhuǎn)子轉(zhuǎn)速n下降,即n0m切割定子、轉(zhuǎn)子繞組,并在定子、轉(zhuǎn)子繞組內(nèi)感應(yīng)出定子電動勢e1a、e1b、e1c和轉(zhuǎn)子電動勢e2a、e2b、e2c,于是轉(zhuǎn)子回路中就有三相電流i2a、i2b、i2c。與氣隙磁通фm相互作用,產(chǎn)生了電磁制動轉(zhuǎn)矩,方向與n0相反,制止轉(zhuǎn)子旋轉(zhuǎn)。i1形成的勵磁磁動勢f1,i2形成的勵磁磁動勢f2。設(shè)相序為a—b—c的定子電流所產(chǎn)生的旋轉(zhuǎn)磁場為逆時針方向,由于n0o。由于轉(zhuǎn)子以轉(zhuǎn)速n逆時針旋轉(zhuǎn),因此f2的實際轉(zhuǎn)速為n2=n-△n=no,方向為逆時針,即f1和f2都逆時針旋轉(zhuǎn),轉(zhuǎn)速都為n2。換句話說,f1和f2保持相對靜止,兩者之間無相對運動。
異步電動機帶負載時氣隙內(nèi)產(chǎn)生旋轉(zhuǎn)磁場bm的正是這兩個相對靜止的磁動勢f1和f2的合成磁動勢fm作用的結(jié)果,即f1=fm+(-f2),此式表示:異步電動機的定子磁動勢包含兩個分量:產(chǎn)生氣隙主磁通φm的勵磁磁動勢fm和抵消由于轉(zhuǎn)子電流產(chǎn)生的轉(zhuǎn)子磁動勢f2的部分(-f2)。
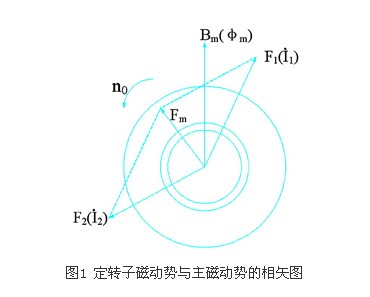
因為n00-n/n<0,所以轉(zhuǎn)子感應(yīng)電動勢se’2反向。i’2落后于e’2的φ2角度處于90°~180°之間,轉(zhuǎn)子電流的有功分量i’2a《0,而轉(zhuǎn)子電流的無功分量i’2r》0。
異步電動機處于減速時相當于異步發(fā)電機,即其向量圖如圖所示。u1和i1之間的相角φ1》90°,此時定子的有功功率為負值,即定子繞組向直流側(cè)回饋電能,而定子的無功功率為正值。站在電動機的角度上看,異步電動機吸收了負的有功功率和滯后的無功功率,前者輸出給電網(wǎng),后者用于勵磁。
3 電機車回饋制動的控制
電動機等效電路如圖2所示。
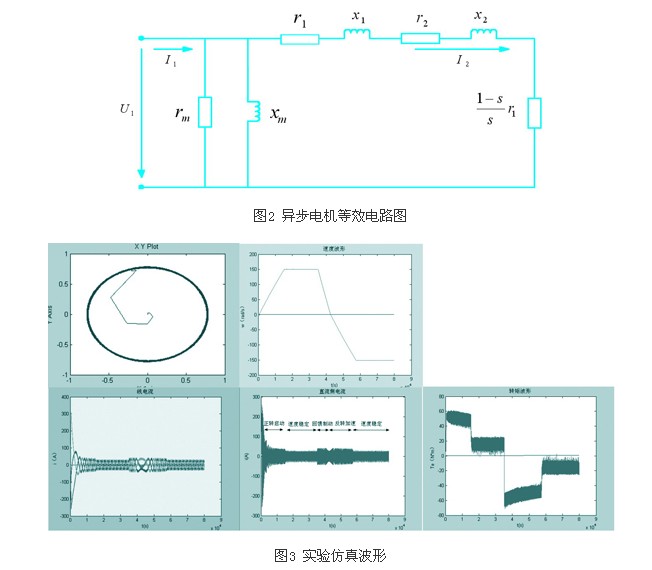
假設(shè)電機所帶負載的機械能基本上被電機內(nèi)部所消耗,于是有
當電機負轉(zhuǎn)差率位于范圍時,系統(tǒng)的機械能經(jīng)電機轉(zhuǎn)化為電能向蓄電池回饋。同時電機不出現(xiàn)過流,也就是反饋的電能不能被電池吸收的部分,可以由電機本身承受消耗而不出現(xiàn)過流當轉(zhuǎn)差率變化超過該范圍時,機械能經(jīng)電機轉(zhuǎn)化的電能無法有效回饋給電池,而剩余部分的能量在電機的線圈內(nèi)阻中又無法完全消耗,因此容易出現(xiàn)過流。所以,從簡化控制的角度出發(fā),當控制轉(zhuǎn)差率在s1≥s≥s2范圍內(nèi)變化時,再生制動過程就可以避免出現(xiàn)過流。
本文提出的再生制動方法在直接轉(zhuǎn)矩控制(dtc)中。首先觀測定子磁鏈,控制定子磁鏈的幅值為恒定然后選擇零矢量、非零矢量來調(diào)節(jié)瞬時轉(zhuǎn)差,控制輸出轉(zhuǎn)矩恒定,所以,由磁鏈環(huán)節(jié)觀測定子磁鏈的幅值及相位,并且選擇矢量控制磁鏈幅值大小;轉(zhuǎn)矩控制環(huán)節(jié)(與磁鏈控制環(huán)節(jié)相結(jié)合)選擇矢量控制磁鏈的旋轉(zhuǎn)速度。系統(tǒng)采用了直接轉(zhuǎn)矩控制方式,其磁鏈控制環(huán)節(jié)可以有效的控制磁鏈的偏差,在這種情況下可以保證輸出的電流諧波少,運行平穩(wěn)。而在直接轉(zhuǎn)矩控制的基礎(chǔ)上實現(xiàn)的再生制動控制,就是使定子頻率跟蹤轉(zhuǎn)子速度變化,只要能保證轉(zhuǎn)差率的變化范圍,就可以實現(xiàn)系統(tǒng)在制動過程中不出現(xiàn)過流。而且制動效果的強弱可以通過調(diào)節(jié)轉(zhuǎn)差率和定子磁鏈負值來實現(xiàn)。
4 仿真結(jié)果
對以上建立的新型直接轉(zhuǎn)矩控制異步電動機變頻調(diào)速系統(tǒng)進行仿真實驗。三相逆變器開關(guān)器件采用igbt,反并聯(lián)反饋二極管,igbt的緩沖電阻rs=10kω,緩沖電容cs=10-3μf。仿真實驗所采用的異步電動機參數(shù)為:額定功率pn=12kw,額定頻率fn=50hz,ψn=0.95wb,rs=0.16891ω,rr=0.13973ω,ls=0.02877h,lm=0.02777h,lr=0.0289h,np=2,j=0.1349kg.m2。控制系統(tǒng)參數(shù):ψ*s=0.95wb,速度給定為150rad/s,負載轉(zhuǎn)矩給定tm=15n.m,轉(zhuǎn)矩限幅值為80n.m,pi調(diào)節(jié)器的比例系數(shù)kp=50,積分系數(shù)ki=130,直流側(cè)電壓udc=600v。
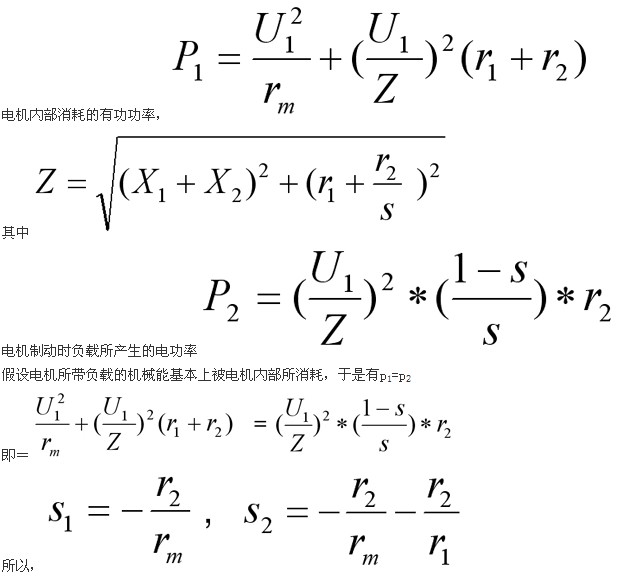
首先速度給定設(shè)為150rad/s,等到系統(tǒng)穩(wěn)定以后,再將速度給定設(shè)為-150rad/s,觀察其磁鏈,速度,轉(zhuǎn)矩,線電流,直流側(cè)電流波形。
從圖3波形可以看出,異步電動機處于加速減速反轉(zhuǎn)等運行狀態(tài),從正向加速到回饋制動,最后到反向加速至穩(wěn)定狀態(tài),實現(xiàn)異步電動機的四象限特性。
5 結(jié)束語
我國礦用蓄電池電機車多數(shù)采用的是直流電動機串電阻調(diào)速,若是課題的成功得以順利的應(yīng)用于煤礦實際中,無論是電機車的調(diào)速性能,牽引能力,承載量和維修量等方面都有全面的提升,另外,從經(jīng)濟效益出發(fā),蓄電池電機車利用制動對蓄電池進行充電,節(jié)約了大量的電能,延長蓄電池電機車的工作時間,減少了蓄電池年平均充電數(shù),延長了蓄電池的使用壽命,大大提高了經(jīng)濟效益。