
在使用相移顯微干涉法對MEMS/NEMS結(jié)構(gòu)表面進(jìn)行測量時(shí),先通過驅(qū)動電路驅(qū)動參考鏡產(chǎn)生次波長量級的光程變化,,即可由電荷耦合器件攝像機(jī)(CCD)和圖像采集卡獲得一組時(shí)間序列上的相關(guān)干涉圖像,,然后由干涉圖的光強(qiáng)信息解算出被測表面的相位值,提取包裹的相位信息,,最后通過一定的相位解包裹算法得到被測表面真實(shí)的相位信息和相應(yīng)的表面高度,,從而得到被測結(jié)構(gòu)表面的3-D輪廓[5-6]。由此可見,,相位解包裹,,也就是相位展開是微結(jié)構(gòu)表面3-D輪廓測量中至關(guān)重要的一步.用于相位展開的方法很多,但通常都具有很強(qiáng)的針對性和局限性.而微納結(jié)構(gòu)的表面輪廓復(fù)雜,并且經(jīng)常含有孔洞,、溝槽,、突起等特征形狀,傳統(tǒng)的解包裹算法不能繞過這些非理想數(shù)據(jù)區(qū)域,,并且導(dǎo)致的誤差會在被測面內(nèi)傳播,,以致影響整個相位展開的結(jié)果。這里提出一種基于模板的廣度優(yōu)先搜索的相位解包裹方法,,它通過模板的使用來剔除對相位展開有影響的非理想數(shù)據(jù)區(qū)域,,使解包裹算法能夠繞過這些區(qū)域進(jìn)行,從而得到比較可靠的結(jié)果,。
1 基于模板的相位解包裹
1.1 相位解包裹
通過相位提取算法,,包含在光強(qiáng)中的代表被測物表面高度信息的相位值被提取出來。但在實(shí)際測量中,,由于物體表面高度的相位變化通常都遠(yuǎn)遠(yuǎn)超出一個波長周期,。因此,各種相位提取算法計(jì)算出來的相位值均是以反正切函數(shù)的形式表示,,即得到的相位分布被截?cái)喑蔀槎鄠€2π范圍內(nèi)變化的區(qū)域,,形成包裹相位。為最終得到被測表面真實(shí)的高度信息,,必須將多個截?cái)嘞辔坏膮^(qū)域拼接展開成連續(xù)相位,,這個過程稱為相位解包裹,或相位展開[6],。干涉測量中要求相鄰兩像素點(diǎn)的相位差小于2π,,否則無法恢復(fù)其真實(shí)相位。當(dāng)滿足這個要求時(shí),,真實(shí)相位的差值則與包裹相位間差值再進(jìn)行包裹運(yùn)算W2的結(jié)果相等,,即:
Δφ(n) = W2{ΔW1[φ(n)]} (n =1,2,,…,,N) (1)
式中Δ為差值運(yùn)算,φ(n)是第n個像素點(diǎn)對應(yīng)其包裹相位W1[φ(n)]的真實(shí)相位,,N為像素點(diǎn)數(shù),。因此,通過對包裹的反正切函數(shù)主值差進(jìn)行求和運(yùn)算即可實(shí)現(xiàn)相位展開[7]:
φ(m) =φ(0)+∑mn=1W2{ΔW1[φ(n)]}(2)
MEMS/NEMS表面3-D輪廓測量針對的通常都是連續(xù)變化的結(jié)構(gòu)表面,,符合相鄰像素點(diǎn)相位差小于2π的要求,,因此依據(jù)式(2)所示的原理即可逐點(diǎn)實(shí)現(xiàn)相位展開。
1.2 基于模板的相位解包裹
隨著相位展開技術(shù)的深入發(fā)展,,相位解包裹算法層出不窮[7-8],。如果僅僅應(yīng)用于簡單區(qū)域(未展開相位圖中不存在非理想數(shù)據(jù)點(diǎn))的相位展開,使用普通的基于深度的優(yōu)先搜索算法即可達(dá)到目的。它通過使用閾值來判斷2π相位跳變,,然后建立補(bǔ)償函數(shù),,最后將未展開相圖與補(bǔ)償函數(shù)相加,得到展開后的相位圖,。此算法非常簡單快捷,,圖1是應(yīng)用于一個簡單區(qū)域的相位展開結(jié)果,左邊為被測表面的包裹相位圖,,右邊為其相位解包裹后的表面輪廓圖。

圖1 使用傳統(tǒng)相位解包裹算法對簡單區(qū)域進(jìn)行相位展開的結(jié)果
然而,,MEMS/NEMS結(jié)構(gòu)經(jīng)常具有比較復(fù)雜的輪廓,,含有孔洞、溝槽,、突起等特征形狀,,被測表面也可能存在缺陷,例如表面鍍膜脫落或者粘附上灰塵等,,再加上陰影和噪聲等的影響,,用普通的相位展開方法就可能引入誤差,并且誤差會傳播到在當(dāng)前像素點(diǎn)之后展開的所有點(diǎn),。圖2為使用傳統(tǒng)相位解包裹算法對含有非理想數(shù)據(jù)點(diǎn)的圓形薄膜進(jìn)行相位展開的結(jié)果,,左邊為薄膜表面的包裹相位圖,右邊為其相位解包裹后的表面輪廓圖,。
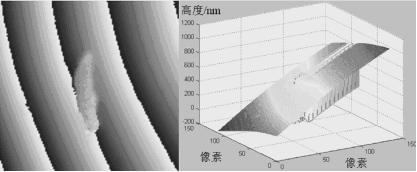
圖2 使用傳統(tǒng)相位解包裹算法對含有非理想數(shù)據(jù)區(qū)域進(jìn)行相位展開的結(jié)果
為了能在相位展開過程中繞過非相容點(diǎn)(包裹相位圖中的非數(shù)據(jù)點(diǎn)和進(jìn)行相位展開運(yùn)算時(shí)可能產(chǎn)生誤差的非理想數(shù)據(jù)點(diǎn)的總稱),,引入基于模板的廣度優(yōu)先搜索算法,它是一種逐點(diǎn)展開的生長算法.在相位展開運(yùn)算之前,,先用模板將非相容點(diǎn)標(biāo)記出來,。相位展開過程是從任意的一個相容點(diǎn)開始,然后均勻地向其鄰域彌散生長,,得出其鄰域的展開相位值,,再一周一周擴(kuò)大,直至整幅圖像,。在其遍歷過程中,,遇到由模板標(biāo)記的非相容點(diǎn)時(shí),就暫時(shí)繞過而不做處理,。用此方法處理的像素點(diǎn)都是相容點(diǎn),,即好的數(shù)據(jù)點(diǎn),因而能夠大幅度地提高相位展開的質(zhì)量,。
2 標(biāo)記模板的方法及實(shí)驗(yàn)結(jié)果
用以標(biāo)記非相容點(diǎn)的模板可以通過多種途徑獲得,。根據(jù)不同應(yīng)用的需要,可以選擇實(shí)現(xiàn)不同功能的不同復(fù)雜程度和不同靈敏程度的模板標(biāo)記方法.本文提出三種不同類型的模板標(biāo)記方法,用以在不同的應(yīng)用需求下選擇使用:1,、子區(qū)域相容性判斷法,;2、邊緣檢測法,;3,、干涉圖灰度差值提取法.對應(yīng)于不同標(biāo)記模板的方法,我們給出了它們應(yīng)用于相位解包裹算法中的具體應(yīng)用實(shí)例,,各方法均由MATLAB編程實(shí)現(xiàn),。
2.1 子區(qū)域相容性判斷法
2.1.1 方法
這種方法在包裹相位圖的基礎(chǔ)上進(jìn)行判斷。判斷一個像素點(diǎn)是否相容,,需要利用其周圍的另外三個像素點(diǎn)的信息,。這四個像素點(diǎn)組成一個2×2的子區(qū)域(圖3)。按順時(shí)針方向計(jì)算這四個像素點(diǎn)兩兩之間的灰度值之差,,得到Δ1,、Δ2、Δ3,、Δ4,;然后確定一個閾值T(如T=π),該閾值就是用來判斷相位條紋跳變邊界的那個“固定閾值”,,并由此閾值判斷Δk,,(k=1,2,,3,,4):如果|Δk|>T,即可認(rèn)為路徑穿過了跳變的界線,,此時(shí),,若Δk>0,則Δk=Δk-2π,,若Δk<0,,則Δk=Δk+2π,目的是將Δk限定在-π到π之間,;最后求ΣΔk,,再次作判斷:如果ΣΔk=0,則該點(diǎn)定義為相容點(diǎn),,如果ΣΔk≠0,,則該點(diǎn)定義為非相容點(diǎn)[6]。

圖3 標(biāo)記2×2區(qū)域相容性示意圖
2.1.2 實(shí)驗(yàn)結(jié)果
圖4是一幅通過模擬得到的包裹相位圖(左)及使用子區(qū)域相容性判斷法得到的模板圖(右),。包裹相位圖中的黑色小方塊是加入的非相容區(qū)域,,從模板圖可以看出,,使用子區(qū)域相容性判斷法可以將此非相容區(qū)域很好地提取出來,然而,,它在識別出噪聲點(diǎn)的同時(shí),,一部分相位跳變邊緣也被識別成了非相容點(diǎn),以至于相位解包裹之后一些原本好的數(shù)據(jù)點(diǎn)也被繞過,,見圖5,。

圖4 模擬的包裹相位圖(左)及使用子區(qū)域相容性判斷法得到的模板圖(右)
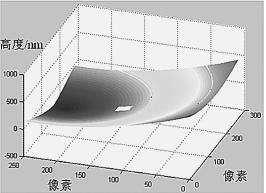
圖5 使用子區(qū)域相容性判斷法獲取模板得到的相位展開結(jié)果
子區(qū)域相容性判斷法理論上可行,但實(shí)驗(yàn)結(jié)果證明其不太適合用于實(shí)際應(yīng)用,,特別是噪聲多,,結(jié)構(gòu)復(fù)雜的測試.但由于此方法運(yùn)算速度非常快,,而且對噪聲,、斷點(diǎn)等靈敏度很高,所以當(dāng)圖像區(qū)域小,,噪聲點(diǎn)遠(yuǎn)離相位跳變邊緣時(shí),仍可以考慮使用,。
2.2 邊緣檢測法
2.2.1 方法
此方法在由干涉圖合成的亮場圖像上運(yùn)用邊緣檢測算法來提取非相容區(qū)域的邊緣.在五步相移干涉測量中,,由得到的五幅干涉圖像可以合成為被測表面的亮場圖像[9],公式為:

式中的Ii為第i幅干涉圖中一個像素點(diǎn)的灰度值(i=1,,2,,3,4,,5),,Ibf為對應(yīng)像素點(diǎn)亮場圖像的灰度值。得到整個待測區(qū)域的亮場圖像之后,,接下來選擇合適的邊緣檢測算法得到非相容區(qū)域模板,。應(yīng)用于邊緣檢測的算子有很多,最常用的有Sobel,,Prewitt,,Roberts,Canny和Laplacian ofGaussian(Log)等幾種,。由于它們使用不同的梯度算子和檢測法則來確定邊緣區(qū)域,,因此具有不同的特點(diǎn).Sobel算子和Prewitt算子類似,對噪聲有一定的抑制作用,,但容易檢測出偽邊緣并丟失有用的邊緣信息,;Roberts算子的檢測定位精度比較高,但對噪聲敏感,;Canny算子的最優(yōu)化逼近算子和雙閾值的使用使其能有效抑制噪聲,,并能精確確定邊緣位置,;Laplacian of Gaussian(LoG)算子選擇濾波的尺度參數(shù)是關(guān)鍵,小尺度的LoG算子可以得到比較準(zhǔn)確的邊緣定位,,但對噪聲較為敏感,,大尺度的LoG算子濾波效果較好,但過度平滑圖像,,容易丟失如角點(diǎn)這樣的邊緣信息[10-11],。
2.2.2 實(shí)驗(yàn)結(jié)果
圖6為圖2所示的圓形薄膜部分的一幅干涉圖像(左)和由五幅干涉圖像合成的亮場圖像(右)。使用MATLAB中的edge函數(shù),,可以很方便地得到使用不同邊緣檢測算法得到的邊緣提取結(jié)果,,如圖7(閾值均為缺省設(shè)置)。

圖6 圓形膜部分的干涉圖及亮場圖像

圖7 使用不同算法得到的邊緣檢測結(jié)果
從上圖結(jié)果可以看出,,只有使用Canny算子的結(jié)果得到了非理想數(shù)據(jù)區(qū)完整閉合的邊緣,。圖8是對Canny算法的閾值進(jìn)行改變得到的結(jié)果??梢?,當(dāng)閾值設(shè)定為(0.3,0.6)時(shí)可得到所需剔除區(qū)域的完整邊緣,。將相應(yīng)的標(biāo)記有非相容點(diǎn)邊緣的模板代入到生長法程序中,,得到解包裹結(jié)果如圖9。

圖8 更改Canny算法的閾值得到的結(jié)果

圖9 使用邊緣檢測法獲取模板得到的相位展開結(jié)果
使用邊緣檢測來獲取相位解包裹模板的方法使用方便,,并且可以根據(jù)具體應(yīng)用選擇合適的閾值來進(jìn)行靈活控制,,比較適合應(yīng)用于具有孔洞等非相容區(qū)域的被測表面的相位解包裹運(yùn)算中.然而,由于干涉測量中噪聲的影響,,合成的亮場圖像本身已含有誤差,,應(yīng)用于大范圍的比較復(fù)雜的表面時(shí)這種方法則較難在控制噪聲和精確定位邊緣之間找到平衡。
2.3 干涉圖灰度差值提取法
2.3.1 方法
這種方法在原始干涉圖的基礎(chǔ)上得到相位解包裹的模板,。在五步相移干涉測量中,,驅(qū)動電路驅(qū)動壓電陶瓷使得參考鏡步進(jìn)移動從而產(chǎn)生步進(jìn)相移,由此得到時(shí)間序列上的五幅干涉圖像,。參考光路的微小變化使得光程差發(fā)生相應(yīng)變化,,致使各幅干涉圖上被測表面的條紋產(chǎn)生相對位移。而由于非數(shù)據(jù)區(qū)沒有條紋,,或者非相容區(qū)域的條紋信息不夠理想,,所以可以根據(jù)各幅干涉圖中對應(yīng)像素點(diǎn)灰度的差值來判斷哪些是相容區(qū)域,從而將非相容區(qū)域提取出來,,得到相位解包裹的模板,。具體實(shí)施的方式為:先將各幅干涉圖對應(yīng)像素的灰度兩兩相減,得到它們之間的灰度差值,,然后設(shè)定一個合適的閾值,,當(dāng)所有的灰度差值都小于這個閾值時(shí),,此像素點(diǎn)即被判定為沒有發(fā)生干涉條紋相對變化的非相容點(diǎn)。
2.3.2 實(shí)驗(yàn)結(jié)果
如果想要對如圖10干涉圖所示的圓形薄膜進(jìn)行全視場范圍的解包裹運(yùn)算,,由于其輪廓較為復(fù)雜,,并包含有相當(dāng)部分的非數(shù)據(jù)區(qū)和非理想數(shù)據(jù)區(qū),所以使用干涉圖灰度差值提取的方法來獲得模板,。設(shè)定合適的閾值得到的模板結(jié)果如圖11,,圖中白色區(qū)域?yàn)檩^為理想的條紋區(qū)域,黑色區(qū)域?yàn)榻獍\(yùn)算中需要繞過的區(qū)域,。圖12是將圖11所示的模板以及包裹圖像代入
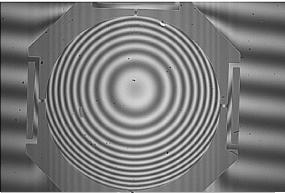
圖10 圓形膜五幅干涉圖中的一幅(1024x1528像素)

圖11 干涉圖灰度差值提取法獲得的解包裹模板圖

圖12 使用干涉圖灰度差提取法獲取模板得到的相位展開結(jié)果
生長算法得到的相位解包裹后并以圓形膜四周的基底區(qū)域作為基準(zhǔn)面調(diào)平后的圓形膜表面3-D輪廓圖像,。可以看出,,使用干涉圖灰度差值提取法獲得模板并使用生長算法在全視場范圍內(nèi)進(jìn)行相位展開獲得干涉圖灰度差值提取法的計(jì)算相對較為復(fù)雜,,但是由于它在最原始的干涉圖像信息上進(jìn)行判斷,所以成功率高,,也可以通過改變閾值靈活地控制模板的靈敏度,,并且使用范圍很廣,對于復(fù)雜輪廓,、溝槽,、噪聲等提取都適用。
3 結(jié)語
具體應(yīng)用實(shí)例的實(shí)驗(yàn)數(shù)據(jù)證明,,基于模板的廣度優(yōu)先搜索相位解包裹方法可以根據(jù)不同應(yīng)用的需要標(biāo)記模板,,從而繞過非相容區(qū)域準(zhǔn)確地實(shí)現(xiàn)相位展開.如果有必要,,可以根據(jù)被繞過區(qū)域周圍像素點(diǎn)的灰度信息,,使用濾波、插值等方法回添這些點(diǎn)的展開相位數(shù)據(jù),。此方法能夠克服普通相位展開方法的局限性,,并因其簡便、靈活,、準(zhǔn)確的特點(diǎn)而能被廣泛應(yīng)用于EMS/NEMS結(jié)構(gòu)較為復(fù)雜的輪廓表面測量的相位展開,。其不足在于不能應(yīng)用于非連續(xù)表面輪廓的測量。
致謝
感謝北京大學(xué)微米納米加工技術(shù)國家重點(diǎn)實(shí)驗(yàn)室的陳兢副教授和王莎莎同學(xué)等,,他們?yōu)楸疚牡难芯抗ぷ魈峁┝瞬糠譁y試結(jié)構(gòu),。
參考文獻(xiàn):
[1] Denhoff M W. A Measurement of Young’s Modulus and Re-sidual Stress in MEMS Bridges Using a Surface Profiler[J].Journal of Micromechanics and Microengineering,2003,,13:686-692.
[2] Lafontan X,,Pressecq F,Beaudoin F,,et al. The Advent ofMEMS in Space[J]. Microelectronics Reliability,,2003,,43:1061-1083.
[3] Jensen B D,de Boer M P,,Masters N D,,et al. Interferometryof Actuated Microcantilevers to Determine Material Propertiesand Test Structure Nonidealities in MEMS[J]. Journal of Mi-croelectromechanical Systems,2001,,10(3):336-346.
[4] Conor O’Mahony,,Martin Hill,Magali Brunet et al,,“Charac-terization of Micromechanical Structures Using White-Light Interferometry[J]”,,Measurement Science and Technology,2003,,14:1807?1814.
[5] Hu Xiaodong,,Hu Chunguang,Guo Tong,,et al. Characteri-zing the Behaviour of Micro ElectroMechanical Structures by Optical Interferometry[C] // International Workshop on Mi-crofactories. Shanghai:2004:492-497.
[6] 胡春光.利用相移顯微干涉術(shù)和頻閃成像技術(shù)研究MEMS離面運(yùn)動[J].天津:天津大學(xué),,精密儀器與光電子工程學(xué)院,2004.
[7] Dennis C. Ghiglia and Mark D. Pritt,,Two-Dimensional PhaseUnwrapping:Theory,,Algorithms and Software[M],John Wiley & Sons,,Inc.,,New York 1998:1-58.
[8] 惠梅,表面微觀形貌測量中相移干涉術(shù)的算法與實(shí)驗(yàn)研究[D],,博士學(xué)位論文,,中國科學(xué)院西安光學(xué)精密機(jī)械研究所,2001年.
[9] Hemmert W,,Mermelstein M S and Freeman D M. Nanometer Resolution of Three-Dimensional Motions Using Video Inter-ference Microscopy[C]//Twelfth IEEE International Confer-ence on Micro Electro Mechanical Systems.1999:302-308.
[10] 李弼程,,彭天強(qiáng),彭波等.智能圖像處理技術(shù)[M],,電子工業(yè)出版社,,2004:149-160.
[11] 薛軍平,何繼善.基于人體信息三維可視化的醫(yī)學(xué)圖像邊緣檢測算法研究[J].生物醫(yī)學(xué)工程研究. 2004,,23(1):7-10.