
摘 要:一種基于視頻解碼芯片與CPLD" title="CPLD">CPLD的實時圖像采集" title="圖像采集">圖像采集系統(tǒng),采用視頻解碼芯片SAA7114H進(jìn)行A/D轉(zhuǎn)換,在CPLD芯片XC95216的邏輯控制下通過乒乓緩存技術(shù)" title="乒乓緩存技術(shù)">乒乓緩存技術(shù)進(jìn)行數(shù)據(jù)存儲。
關(guān)鍵詞:圖像采集 CPLD 乒乓緩存技術(shù)
圖像采集是實時圖像處理的重要步驟。目前,圖像傳感器件主要有CCD(Charge Coupled Device)和CMOS(Complementary Metal Oxide Semiconductor)。CCD技術(shù)現(xiàn)在已經(jīng)非常成熟, CCD攝像頭仍然是高端應(yīng)用的首選器件。它輸出的模擬視頻信號包括圖像信號、行與場消隱信號、行與場同步信號等七種信號。傳統(tǒng)的視頻采集系統(tǒng)由A/D 轉(zhuǎn)換電路、控制邏輯電路、數(shù)據(jù)緩存電路、地址發(fā)生器、地址譯碼電路等構(gòu)成,此類設(shè)計有電路復(fù)雜、芯片繁多、開發(fā)周期長、成本高等缺點。
本文采用視頻解碼芯片與復(fù)雜可編程邏輯器件CPLD(Complex Programmable Logic Device)設(shè)計了一套實時圖像采集系統(tǒng),克服了以上缺點。其中視頻解碼芯片可以從視頻信號中自動獲取行、場同步信號,并完成A/D轉(zhuǎn)換,而具有在系統(tǒng)編程(ISP)功能的CPLD可以通過軟件實現(xiàn)邏輯重構(gòu),將邏輯控制、地址發(fā)生器等電路全部集成在一塊芯片中。系統(tǒng)具有體積小、成本低、可靠性高、升級容易、開發(fā)周期短等優(yōu)點。
1 視頻解碼芯片SAA7114H的性能特點[1]
SAA7114H是一個高集成度的電路,在視頻采集領(lǐng)域有著廣泛的應(yīng)用。視頻解碼基于行鎖定時鐘解碼原則,能夠?qū)AL、SECAM和NTSC制式信號轉(zhuǎn)變?yōu)榕cITU601標(biāo)準(zhǔn)兼容的標(biāo)準(zhǔn)視頻信號。SAA7114H能夠接收TV的CVBS信號或VCR的S-VIDEO信號,同時通過它的擴展接口(X端口)還能夠接收MEPG碼流或VIDEO PHONE碼流的數(shù)字視頻信號。經(jīng)過SAA7114H解碼后的視頻信號,還能夠根據(jù)實際的應(yīng)用,選擇8位或16位寬度的數(shù)據(jù)輸出格式。
SAA7114H的主要任務(wù)就是捕捉和縮放視頻圖像,向顯示控制器提供標(biāo)準(zhǔn)的YUV數(shù)字視頻流輸出格式。SAA7114H的主要特點如下:
(1)對每路CVBS或Y/C輸入信號可以選用可編程的靜態(tài)增益或自動增益控制。
(2)含有兩個9位視頻A/D變換器,在擴展接口中可以接收數(shù)字CVBS信號或Y/C信號的輸入。
(3)數(shù)字鎖相環(huán)適用于各種標(biāo)準(zhǔn)和非標(biāo)準(zhǔn)視頻信號源的同步處理和時鐘的產(chǎn)生。
(4)水平和垂直同步信號的檢測。
(5)在片產(chǎn)生符合ITU601標(biāo)準(zhǔn)的行鎖定時鐘。
SAA7114H還提供一個I2C接口,用于和主控芯片相連接,從而可以對其內(nèi)部的寄存器進(jìn)行讀寫操作,控制SAA7114H的工作狀態(tài)。
經(jīng)過SAA7114H解碼后的視頻信號,必須保持正確的時序?qū)?yīng)關(guān)系,才能完整無誤地恢復(fù)原來的視頻圖像。SAA7114H輸出的時序包括行場同步信號、行場消隱信號、行頻場頻、場識別信號等。以PAL制信號為例,其行、場時序關(guān)系如圖1所示。

其中,HREF信號為行消隱信號,VGATE代表場消隱信號(可以通過對寄存器VSTO[8:0]和VSTA[8:0]的編程進(jìn)行確定),HREF與V123信號結(jié)合能判斷當(dāng)前為奇場或是偶場,F(xiàn)ID為場識別信號。以上各信號都能通過SAA7114H的相關(guān)管腳進(jìn)行輸出(如RTSO、RTSI、XRH和XRV管腳等)。
2 復(fù)雜可編程邏輯器件XC95216的性能特點[2]
XC95216是Xilinx公司的一種復(fù)雜可編程邏輯器件,具有豐富的可編程I/O引腳、在系統(tǒng)可編程、使用方便靈活的特點。不但可實現(xiàn)常規(guī)的邏輯器件功能,還可實現(xiàn)復(fù)雜的時序邏輯功能。其主要功能特點如下:多達(dá)166個用戶I/O引腳,所有引腳的腳對腳邏輯延遲為10ns,fCNT可達(dá)111MHz,216 個宏單元,具有4800個可用門。
3 實時圖像采集系統(tǒng)組成及其工作原理
本文設(shè)計的實時圖像采集系統(tǒng)是一個基于DSP的活動目標(biāo)跟蹤系統(tǒng)的圖像采集部分。DSP對圖像采集部分提供的數(shù)字圖像信號進(jìn)行相關(guān)的計算處理,識別目標(biāo),然后控制相關(guān)設(shè)備,達(dá)到跟蹤目標(biāo)的目的。系統(tǒng)要求實時性強、體積小。
設(shè)計中采用視頻解碼芯片SAA7114H將CCD攝像頭獲得的模擬視頻信號轉(zhuǎn)換為數(shù)字信號。在此實時圖像處理系統(tǒng)中,恒速的視頻解碼芯片SAA7114H與變速的DSP圖像處理之間需要加入緩沖電路。緩沖電路一般有3種結(jié)構(gòu):雙口RAM結(jié)構(gòu)、FIFO結(jié)構(gòu)、乒乓緩存結(jié)構(gòu)。前兩種緩沖結(jié)構(gòu)的存儲容量相對較小,不是特別適合高速圖像處理系統(tǒng)。乒乓緩存結(jié)構(gòu)的特點決定了可以用相對較便宜的高速大容量SRAM、外圍邏輯器件構(gòu)成比雙口RAM以及高速FIFO更適合視頻處理系統(tǒng)所需要的緩沖存儲器。采用CPLD控制兩塊SRAM以乒乓方式工作,實現(xiàn)數(shù)據(jù)流在系統(tǒng)中的高速傳輸。
3.1 視頻采集的工作流程
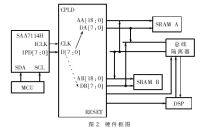
視頻采集的硬件框圖如圖2所示。系統(tǒng)復(fù)位后,單片機(MCU)通過I2C 總線對SAA7114H初始化。單片機采用Philips公司的P89C61X2BN,具有在系統(tǒng)編程功能,允許更改SAA7114H初始化程序,并可燒寫到單片機FLASH中,相當(dāng)方便。初始化成功后,SAA7114H 開始工作,將輸入的模擬視頻信號轉(zhuǎn)換成720×576 的YUV422數(shù)字信號,然后輸入CPLD。CPLD 一方面進(jìn)行格式轉(zhuǎn)換,輸出YUV4:1:1、CIF格式的數(shù)字信號,另一方面還作為地址發(fā)生器,與CIF格式數(shù)據(jù)一起輸入到SRAM。CPLD 還產(chǎn)生SRAM 的讀寫控制信號,使用兩片SRAM,以乒乓方式工作,每片保存一場圖像。圖2中指向DA[7:0]的實線箭頭與指向DB[7:0]的虛線箭頭表示CPLD的D[7:0]端口的數(shù)據(jù)輪流輸送給DA與DB端口。在保存好一場圖像后,CPLD以中斷方式通知DSP作相應(yīng)處理。
3.2 乒乓緩存控制原理
“乒乓操作”是一個常常應(yīng)用于數(shù)據(jù)流控制的處理技巧。典型的乒乓操作方法如圖3所示。乒乓操作的處理流程如下:輸入數(shù)據(jù)流通過“輸入數(shù)據(jù)選擇單元”(在本采集系統(tǒng)中,CPLD內(nèi)部邏輯結(jié)構(gòu)完成此數(shù)據(jù)選擇功能),等時地將數(shù)據(jù)流分配到數(shù)據(jù)緩沖區(qū)SRAM A和SRAM B中。在第一場的時間,將輸入的數(shù)據(jù)流緩存到SRAM A。在第二場的時間,通過“輸入數(shù)據(jù)選擇單元”的切換,將輸入的數(shù)據(jù)流緩存到SRAM B,與此同時,將SRAM A的數(shù)據(jù)(第一場圖像數(shù)據(jù)),通過“輸出數(shù)據(jù)選擇單元”的選擇,送到“數(shù)據(jù)流運算處理模塊”(DSP)運算處理。在第三個緩沖周期,通過“輸入數(shù)據(jù)選擇單元”的再次切換,將輸入的數(shù)據(jù)流緩存到SRAM A,與此同時,將SRAM B的數(shù)據(jù)(第二場圖像數(shù)據(jù))通過“輸出數(shù)據(jù)選擇單元”的切換,送到“數(shù)據(jù)流運算處理模塊”運算處理。如此循環(huán),周而復(fù)始。
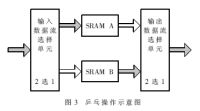
乒乓操作的最大特點是通過“輸入數(shù)據(jù)選擇單元”和“輸出數(shù)據(jù)選擇單元”,按節(jié)拍、相互配合地切換,將經(jīng)過緩沖的數(shù)據(jù)流不停頓地送到“數(shù)據(jù)流運算處理模塊”,進(jìn)行運算及處理。把乒乓操作模塊當(dāng)作一個整體,此模塊兩端的輸入數(shù)據(jù)流與輸出數(shù)據(jù)流均是連續(xù)不斷的,沒有任何停頓,因此非常適合進(jìn)行流水線式處理,完成數(shù)據(jù)的無縫緩沖與處理。
3.3 CPLD的設(shè)計
3.3.1 數(shù)據(jù)緩存
將數(shù)據(jù)保存到SRAM,需在采樣的同時產(chǎn)生地址。每塊SRAM 的地址線都有兩組,一組由CPLD 給出,一組由DSP 給出。為了解決共用存儲器時的資源沖突問題,需控制DSP和SRAM、CPLD和SRAM之間的通斷[3]。CPLD通過提供總線隔離器的控制信號,在CPLD對SRAM A操作時就將CPLD到SRAM B的地址線、數(shù)據(jù)線、片選信號都置高阻,設(shè)置隔離器使DSP與SRAM B導(dǎo)通,而與SRAM A斷開,此時DSP可以讀取SRAM B,反之亦然。實際上,SRAM的數(shù)據(jù)線也有兩組,其工作方式和地址線一樣。為了給DSP 以充裕的時間讀取RAM 中的數(shù)據(jù),還要控制將每場圖像存入不同的RAM,使兩片SRAM以乒乓方式工作。設(shè)計中選用了ISSI公司的IS61LV5128,容量為512KB。
3.3.2 接口
CPLD 的主要外圍接口如下:(1)輸入部分。圖像數(shù)據(jù)IPD[7:0]、時鐘LCLK、場同步VREF、行同步HREF、復(fù)位RES。(2)輸出部分。圖像數(shù)據(jù)IPO1[7:0]和IPO2[7:0],片選信號ce1、ce2,寫使能we1、we2,地址add1[18:0]、add2[18:0],總線隔離器的開關(guān)信號f1、f2,DSP 中斷信號dspint(這里沒有設(shè)置SRAM 的OE 信號,因為CPLD只需要將數(shù)據(jù)寫入SRAM,不需要從SRAM中讀數(shù)據(jù))。
3.3.3 VHDL實現(xiàn)
設(shè)計中采用VHDL對CPLD進(jìn)行邏輯實現(xiàn)。程序中“乒乓”控制部分代碼如下:
PROCESS (res,clk,idq)
BEGIN
IF (res=′0′) THEN
tadd1<=″0000000000000000000″;
tadd2<=″0000000000000000000″;
add1<=tadd1;
add2<=tadd2;
count<=″00″;
ELSIF (clk′EVENT AND clk=′1′) THEN
IF (idq=′1′) THEN
IF (oddoreven=′1′) THEN
tadd1<=tadd1+′1′;
add1<=tadd1;
ELSIF (oddoreven=′0′) THEN
tadd2<=tadd2+′1′;
add2<=tadd2;
END IF;
END IF;
END IF;
END PROCESS;
本文設(shè)計了一套基于視頻解碼芯片SAA7114H與CPLD的實時圖像采集系統(tǒng),其硬件結(jié)構(gòu)簡單,系統(tǒng)穩(wěn)定,完全滿足基于DSP的活動目標(biāo)跟蹤系統(tǒng)的需要,具有很強的實用性,稍加改動即可用于其他場合,如監(jiān)控系統(tǒng)等。
參考文獻(xiàn)
[1] SAA7114H DATA SHEET,2000.
[2] XC95216 In-System Programmable CPLD DATA SHEET,2001.
[3] 章 勇.CPLD 在視頻采集中的應(yīng)用和實現(xiàn).電子技術(shù),2004,(12).