
現(xiàn)在以GPS(全球衛(wèi)星定位系統(tǒng))為核心的GIS(地理信息系統(tǒng))設(shè)備正進入普及應(yīng)用階段。隨著技術(shù)的發(fā)展,各種移動定位終端已經(jīng)深入我們的生活,而同時人們需要更多基于位置的安全保障,于是也向GPS提出了新的要求,能否提供一種嵌入式GPS,提供安防聯(lián)防諸如巡查過程中保安移動信息服務(wù),位置監(jiān)控調(diào)配服務(wù)等。不言而喻,GPS、微型嵌入式終端等新技術(shù),必然成為GIS中一個新興的重要研究領(lǐng)域。
本設(shè)計主要實現(xiàn)電子巡查系統(tǒng)(圖1)智能終端兩個關(guān)鍵技術(shù)環(huán)節(jié):GPS信息獲取以及空間位置信息、總臺命令的無線交互傳輸。
系統(tǒng)設(shè)計
以往的保安巡查沒有太多設(shè)備,人均一個對講機,一條警棍。隨著GPS的出現(xiàn),基站即總臺對每個保安的地理位置信息的掌握成為可能。即每個保安配備一套GPS定位設(shè)備,以及一套將自身位置信息發(fā)送給總臺的無線收發(fā)設(shè)備。由于給每個保安重新配備一套設(shè)備成本高昂,而且淘汰已有的對講機不夠現(xiàn)實,于是,將對講機作為已有的信道載體,便一舉兩得,只須對舊的對講機作局部電路的調(diào)整修改,就能既方便又實際地構(gòu)筑前所未有的安全體系。

圖1 電子巡查系統(tǒng)應(yīng)用
利用主板與各個功能模塊的結(jié)合組成移動智能終端。它包括MCU即單片機AT89S52、GPS接收模塊、模擬調(diào)制解調(diào)芯片MSM6882、液晶顯示模塊LCD1602、語音合成芯片XF1M01,見圖2。
移動智能終端完成正向GPS數(shù)據(jù)采集、處理和發(fā)送,以及反向?qū)偱_命令進行接收、識別、執(zhí)行。
其中GPS模塊一秒鐘輸出一次GPS信息,MCU將其收錄,并在顯示模塊上顯示自身經(jīng)緯度和時間日期。然后通過調(diào)制解調(diào)芯片將數(shù)據(jù)加載到對講機然后無線傳輸給總臺,完成正向任務(wù)。
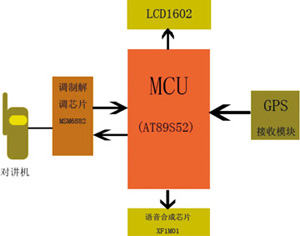
圖2 智能終端結(jié)構(gòu)
接著會有大約半秒種時間段等待總臺命令,若收到總臺的命令,即根據(jù)數(shù)據(jù)幀判斷命令類型,提取相應(yīng)數(shù)據(jù),經(jīng)MCU處理后執(zhí)行相應(yīng)的顯示操作和語音提示操作,完成反向任務(wù)。
當(dāng)終端接收到目標命令信息并處理執(zhí)行后,重新發(fā)送回總臺時前導(dǎo)碼改變以表示命令接收成功,使總臺作出相應(yīng)處理。例如前導(dǎo)碼可以從“start”變成“start1”。
和以往功能單一,界面欠缺人性化的便攜式設(shè)備相比,這個GPS數(shù)據(jù)采集處理傳輸一體化智能終端有了功能的擴展。首先,每個保安可以在LCD顯示屏上看到自己的所在經(jīng)緯度、時間日期等信息,給保安一個直觀,清晰的地理位置感。另外,可以實時接收來自總臺的命令信息,經(jīng)MCU處理后,將總臺派遣前往的地點經(jīng)緯度現(xiàn)實在LCD屏幕與自身位置加以對比,實現(xiàn)信息的透明化。另一個改進是語音提示智能化以及角度偏置的計算,通過接收總臺發(fā)出的目標派遣地點經(jīng)緯度,與自身位置比較后,明確清晰地提示保安該往什么方向走多遠。系統(tǒng)終端采用51系列的單片機作MCU。用調(diào)制解調(diào)芯片把信號加載到對講機實現(xiàn)無線傳輸代替獨立的無線通信模塊。液晶屏選取簡單易用的LCD1602。方案大大降低成本,而且穩(wěn)定可靠。
系統(tǒng)必須制定一個合理的流程(圖3)以便充分發(fā)揮MCU對數(shù)據(jù)采集、處理、傳輸?shù)裙δ堋?/p>
為了使系統(tǒng)工作盡量的穩(wěn)定,功能盡量的多(上行下行都有各自的處理執(zhí)行時間),以及數(shù)據(jù)更新盡量的快(GPS數(shù)據(jù)一秒一幀,系統(tǒng)處理不夠用可將其改成兩秒一幀),系統(tǒng)必須制定一個合理的時序以便統(tǒng)一分配時間。

圖3 終端工作流程
MCU控制各個功能模塊工作可參考圖4的時間安排。

圖4 終端MCU控制時序分配
如圖4所示,在1秒時隙內(nèi),先接收GPS信號(圖中GPS表示),經(jīng)采集后再發(fā)送給調(diào)制芯片(圖中Send_data),然后控制LCD顯示(圖中LCD),顯示完畢后開始等待接收總臺命令信號,等待直至下一秒的到來,相隔大約0.6秒。若下一秒到來前沒有命令信號則轉(zhuǎn)入下一個循環(huán);若下一秒到來前有接收到命令信號則進入接收程序(圖中Receive_data),經(jīng)過短暫的數(shù)據(jù)處理時間段(圖中process)后再啟動顯示(圖中LCD2),然后驅(qū)動語言芯片發(fā)音(圖中Speak)。成功收到命令信息后,下一周期的“Send_data”將改變前導(dǎo)碼以反饋給總臺。
硬件電路設(shè)計
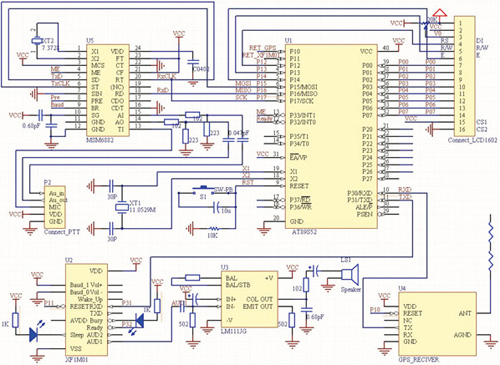
圖5 智能終端整體硬件電路
MCU
本設(shè)計采用AT89S52作為MCU,其中P0口與P1口的2,3,4控制LCD1602;P1口的5,6,7作為同步串口控制調(diào)制解調(diào)芯片MSM6882;串口的RX接收GPS數(shù)據(jù),TX發(fā)送語音數(shù)據(jù)(見圖5)。
GPS模塊
設(shè)計采用u-blox公司的GPS接收模塊nr-86,該模塊體積小重量輕,集成高靈敏度、低功耗的NemeriX芯片方案于設(shè)計中。本模塊能快速定位,1Hz導(dǎo)航更新頻率,并可以對16顆衛(wèi)星進行同時跟蹤。支持WGS-84的數(shù)據(jù)協(xié)議。它接口簡單,TTL電平串口輸出NMEA-0183格式的數(shù)據(jù),只須連接模塊的TX端與51單片機的RX端,另外單片機P1.0與模塊的RESET端相連,以控制模塊復(fù)位。本設(shè)計采用NMEA默認格式中的$GPRMC協(xié)議,是由于該協(xié)議精簡,信息覆蓋面廣,數(shù)據(jù)容易被單片機采集處理。
調(diào)制解調(diào)芯片MSM6882
在設(shè)計時,89S52單片機通過同步串口與該芯片相連,然后由芯片把信號調(diào)制到模擬信道,再將信號加載到對講機(PTT)上,由對講機實現(xiàn)無線傳輸。單片機CLK引腳的輸入時鐘周期應(yīng)在0.42μs到1.35μs范圍內(nèi),通過可調(diào)電阻調(diào)節(jié)調(diào)制信號輸入到電臺的幅值。信號一路經(jīng)信號限幅后送入MSM6882的AI引腳,另外一路經(jīng)放大、檢波、幅值比較后送入單片機,以作為載波檢測信號。當(dāng)系統(tǒng)檢測到該信號時,可以采取延時發(fā)送的方式來避免同頻干擾和信道阻塞。
語音合成芯片XF1M01
語音合成芯片XF1M01通過異步串口接收待合成的文本,它內(nèi)含GB-2312漢字字庫,外接單支三極管驅(qū)動揚聲器,即可實現(xiàn)文本到聲音(TTS)的轉(zhuǎn)換,設(shè)計中音頻輸出通過功放再送給揚聲器,以獲得較大音量,適應(yīng)戶外環(huán)境。只須送給它漢字的內(nèi)碼(即16位二進制字符),即可讀出一字,多送多讀,因此對存放空間的要求要低,適合電子巡查系統(tǒng)的應(yīng)用。芯片空閑時Ready端輸出低電平,因此將其連至單片機P3.2,單片機即可掃描該引腳,當(dāng)芯片空閑時就通過異步串口給它發(fā)送數(shù)據(jù)。傳輸波特率由Baud_0、Baud_1兩個引腳決定,設(shè)計中采用的是9600bps。單片機的P1.1與芯片RESET端相連以控制芯片復(fù)位。
結(jié)語
設(shè)計了一個嵌入式智能移動定位終端,經(jīng)過實物調(diào)試成功。巧妙利用低成本硬件實現(xiàn)了GPS的信號采集、處理、傳輸?shù)鹊墓δ堋TO(shè)計通過低成本的設(shè)備改良制作出了智能移動終端,實現(xiàn)總臺對保安位置等信息的掌握,監(jiān)控。本設(shè)計巧妙地運用原有對講機網(wǎng)絡(luò)作為數(shù)字通信媒介,使得成本更低應(yīng)用更方便。另外語音合成文本芯片的運用簡化了硬件的開發(fā)。
參考文獻:
[1] 何立民,單片機原理及應(yīng)用,北京航空航天大學(xué)出版社,1990.
[2] 劉大杰,GPS原理與數(shù)據(jù)處理,同濟大學(xué)出版社,1996,
[3] NR-86 datasheet,u-blox
[4] MSM6882 datasheet,OKI
[5] XF1M01 datasheet,科大訊飛