
摘 要: 介紹了一種機(jī)械傳動中間隙的實(shí)時(shí)檢測方法及其具體實(shí)現(xiàn)電路。該電路結(jié)構(gòu)緊湊,方法合理、實(shí)用。經(jīng)實(shí)際使用證明,性能穩(wěn)定,完全滿足實(shí)用和研究的需要。
關(guān)鍵詞: 間隙 增量碼盤 自整角機(jī)
伺服系統(tǒng)的機(jī)械傳動部分,無論傳動形式是齒輪、鏈條、鋼索還是杠桿,在傳動過程中總存在著間隙。間隙非線性不僅會增大系統(tǒng)的靜差,而且還會影響系統(tǒng)的動態(tài)品質(zhì),使系統(tǒng)在單位階躍信號作用下過度過程時(shí)間加長,振蕩次數(shù)增多,甚至產(chǎn)生不衰減的自振蕩。因此研究間隙對系統(tǒng)的影響具有很大的實(shí)際意義。
研究間隙的影響,就需要獲取傳動中的間隙。本文正是在某型坦克炮塔的控制算法研究中產(chǎn)生的。
1 間隙的獲取方法
系統(tǒng)的組成框圖如圖1所示。

間隙是由機(jī)械傳動裝置產(chǎn)生的。由電機(jī)軸反饋回來的位置信號是不包含間隙的,而由負(fù)載軸反饋回來的位置信號包含有間隙成份。電機(jī)軸和負(fù)載軸的速比是固定的,所以我們可以通過如下方法獲取間隙:由電機(jī)軸位置乘以和兩軸速比對應(yīng)的“電子速比”得到負(fù)載軸的理想的無間隙位置,然后再與由負(fù)載軸反饋來的實(shí)際位置相減即是對應(yīng)時(shí)刻的間隙。
2 電路的組成
計(jì)算機(jī)可選任意型號,本系統(tǒng)為研究方便選用的是系統(tǒng)機(jī)486PC兼容機(jī)。
接口電路主要包括用于檢測電機(jī)軸位置的碼盤信號整形、判向、計(jì)數(shù)緩沖部分;用于檢測負(fù)載軸位置的自整角機(jī)信號接收轉(zhuǎn)換模塊;命令輸出(D/A)以及開關(guān)量I/O。
2.1 電機(jī)軸位置的檢測電路
電機(jī)軸位置的檢測選用與電機(jī)軸同軸的增量式碼盤作傳感器。增量式碼盤體積小、精度高且易于安裝。如瑞士生產(chǎn)的一種碼盤,外觀尺寸是Φ44mm,厚度僅22mm,而精度最高可達(dá)9000 脈沖/轉(zhuǎn)。本系統(tǒng)選用的是FANUC公司生產(chǎn)的電機(jī)配套碼盤,2000脈沖/轉(zhuǎn)。負(fù)載軸位置的檢測選用自整角機(jī),采用粗精組合技術(shù)也可達(dá)相當(dāng)高的精度。本系統(tǒng)中的精度最高可達(dá)19位的分辨率,實(shí)際只用了16位。
電機(jī)軸位置檢測相關(guān)電路框圖如圖2所示。
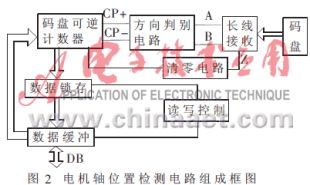
碼盤計(jì)數(shù)器選用74LS193二進(jìn)制可逆計(jì)數(shù)器級聯(lián)組成。193具有加減計(jì)數(shù)控制端、清零端、置數(shù)控制端,正好滿足電路的需要。增量式碼盤產(chǎn)生的A、B、Z三相信號經(jīng)長線驅(qū)動變換成三組差動信號送至長線接收電路。其中A、B脈沖信號相位相差90度,用于判向和計(jì)數(shù);Z脈沖信號電機(jī)軸每轉(zhuǎn)一圈一個(gè)用于清零(測間隙不用,與清零電路配合用于伺服系統(tǒng)歸零位)。這里的長線接收器選用AM26ls32。
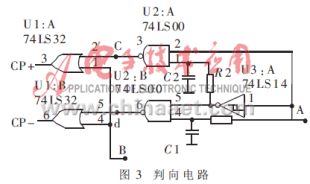
判向電路組成如圖3所示。
具體的判向過程如圖4所示。
 ?
? 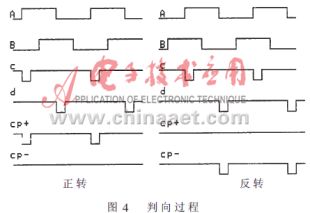
由圖4可以看出,碼盤輸出的脈沖經(jīng)方向判別電
機(jī)械傳動間隙的實(shí)時(shí)檢測電路設(shè)計(jì)路被分解為cp+、cp-兩路脈沖,正轉(zhuǎn)cp+脈沖,cp-為高電平,反轉(zhuǎn)則相反。
數(shù)據(jù)鎖存選用74LS374,緩沖用245。由于碼盤的脈沖是隨時(shí)產(chǎn)生的,為避免CPU在計(jì)數(shù)期間來讀數(shù),需要把CP+、CP-引入鎖存電路,具體電路示于圖5。
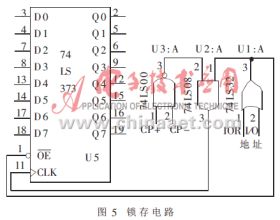
這里我們利用cp+、cp-脈沖的前沿鎖存數(shù)據(jù),而計(jì)數(shù)利用的是cp+、cp-的后沿,故鎖存的數(shù)據(jù)是可靠的。同時(shí)CPU讀取的是鎖存后的數(shù)據(jù),這就解決了兩者的同步問題。應(yīng)注意的是,由于把讀信號引入產(chǎn)生鎖存信號的與門,這可能引起A/D轉(zhuǎn)換一個(gè)碼的誤差。一般這也是符合A/D轉(zhuǎn)換器的設(shè)計(jì)精度要求的。
2.2 負(fù)載軸位置的檢測電路
負(fù)載軸位置的檢測電路組成框圖示于圖6。
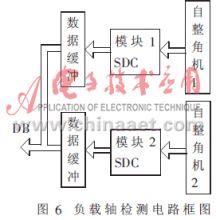
自整角機(jī)1、自整角機(jī)2分別安裝在負(fù)載軸和與其相連的傳動軸上,構(gòu)成粗精組合檢測電路。SDC模塊選用英國產(chǎn)的SDC1704。SDC1704是模擬的連續(xù)跟蹤的自整角機(jī)/旋轉(zhuǎn)變壓器數(shù)字轉(zhuǎn)換器,廣泛應(yīng)用于軍事和工業(yè)領(lǐng)域。它具有以下特點(diǎn):
·參考電壓頻率可選:60Hz,400Hz,2.6kHz;
·低厚度(0.4英寸);
·360°全角轉(zhuǎn)換對應(yīng)數(shù)字量14位;
·高跟蹤速度(75轉(zhuǎn)/分);
·實(shí)際電壓隨外加電阻變化;
·與角速度成比例的直流電壓輸出;
·重量輕(30盎司)。
根據(jù)選擇,其輸入信號可為3路自整角機(jī)信號+參考信號或4路旋轉(zhuǎn)變壓器信號+參考信號。輸出信號為與TTL電平兼容的并行自動二進(jìn)制碼。
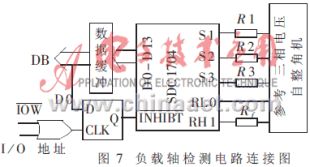
SDC1704模塊與自整角機(jī)的連接共有5根線(示于圖7)。其中三跟相電壓線上的信號相位互差120°,而線線間的線電壓直接決定著三個(gè)電阻R1、R2、R3阻值的選擇。參考電壓的大小決定著電阻Rf的阻值。電阻的選擇原則是:對R1、R2、R3,信號電壓在規(guī)定的額定值基礎(chǔ)上每增加1V,應(yīng)串1.11kΩ;對Rf,參考電壓在額定值基礎(chǔ)上每增加1V,應(yīng)串2.2kΩ。例如,若線間電壓額定值11.8V,參考電壓額定值26.0V,希望使用60V線電壓和115V參考電壓,則電阻的計(jì)算過程為:
R1,R2,R3:60-11.8=48.2V
48.2×1.11=53.5kΩ
Rf: 115-26.0=89V
89×2.2=195.8kΩ
這里應(yīng)注意的是,對R1、R2、R3,電阻間的比例誤差比單純的阻值更重要。1%的比例誤差將導(dǎo)致17弧分的不精確度!
SDC1704模塊與計(jì)算機(jī)間的接口非常簡單(示于圖7)。數(shù)據(jù)緩沖選用兩片244即可,兩片的數(shù)據(jù)輸出控制連在一起由一個(gè)地址選通。為防止CPU在模塊轉(zhuǎn)換期間讀數(shù),使用如圖邏輯控制其INHIBT引腳。由于該腳為低電平禁止轉(zhuǎn)換,故讀數(shù)前應(yīng)向相應(yīng)的I/O口送一數(shù)據(jù),確保D觸發(fā)器Q為0。
由兩塊SDC1704模塊讀回的粗精兩個(gè)14位數(shù)據(jù),需要根據(jù)其變比組合成一個(gè)負(fù)載軸對應(yīng)的角度,在組合過程中還須考慮粗大誤差進(jìn)行糾錯(cuò)處理,關(guān)于具體細(xì)節(jié),這里不再贅述,但給出一個(gè)實(shí)用的經(jīng)驗(yàn)公式:

3 關(guān)于電路中的16位數(shù)據(jù)選通信號I/OCS16
如果使用PC或PC兼容機(jī),16位數(shù)據(jù)輸入輸出就必須給出I/OCS16信號。該信號一般教科書上都是按圖8給出的。實(shí)際使用時(shí)發(fā)現(xiàn)此種方法不可靠,容易引起死機(jī)或誤操作。主要原因是這種方式構(gòu)成的電路之間很易相互干擾。如某電路1要進(jìn)行16位讀或?qū)懖僮鳎鋵?yīng)的端口地址1為0,相應(yīng)的I/OCS16信號在讀或?qū)戇^程中就應(yīng)為低電平0。而實(shí)際上另一電路2此時(shí)沒I/O請求(肯定不會有),但由于電路1的讀或?qū)懖僮魇闺娐?相應(yīng)的三態(tài)門打開,電路2要強(qiáng)行把I/OCS16信號拉高。這樣如果門電路負(fù)載能力稍差,勢必會造成I/OCS16信號該高的不高,該低的不低。換成圖9所示電路,類似問題就不復(fù)存在。
4 正確使用電路
在編制應(yīng)用程序時(shí),應(yīng)注意開始時(shí)讓碼盤的0位與自整角機(jī)的0位相一致。我們采用的方法是送指令使系統(tǒng)啟動,采集負(fù)載軸的位置,等到其為0時(shí),通過置數(shù)端給193置0。
該電路結(jié)構(gòu)合理、實(shí)用,已被成功應(yīng)用于有關(guān)間隙的項(xiàng)目研究中。經(jīng)實(shí)際使用證明,工作可靠,性能良好。
參考文獻(xiàn)
1 張宇河.計(jì)算機(jī)控制系統(tǒng).北京:北京理工大學(xué)出版社,1996
2 胡佑德.伺服系統(tǒng)原理與設(shè)計(jì).北京:北京理工大學(xué)出版社,1993 ???????
?