
企業(yè)化桑蠶選種育種目前仍由人工逐粒進(jìn)行辨別分檢完成,工作繁瑣,效率低下。隨著人力資源成本的提升,已經(jīng)成為企業(yè)生產(chǎn)過(guò)程的瓶頸,制約著企業(yè)規(guī)模的進(jìn)一步擴(kuò)大。根據(jù)企業(yè)需求,利用高速線(xiàn)陣圖像傳感器TCD1208AP(高速線(xiàn)陣圖像傳感器TCD1208AP簡(jiǎn)稱(chēng)CCD)和單片機(jī)STC12C5412(單片機(jī)STC12C5412簡(jiǎn)稱(chēng)MCU),結(jié)合桑蠶選種要求和其體型特征,開(kāi)發(fā)了基于CCD的桑蠶選種識(shí)別系統(tǒng),應(yīng)用于生產(chǎn)線(xiàn)后,收到了較好的經(jīng)濟(jì)效益和社會(huì)效益。
1 圖像識(shí)別系統(tǒng)基本工作原理
圖像識(shí)別系統(tǒng)由CCD傳感器、光學(xué)鏡頭、三色獨(dú)立控制照明燈、通信電路、電磁彈剔機(jī)構(gòu)、LCD顯示電路及MCU、電源電路等組成,如圖1所示。
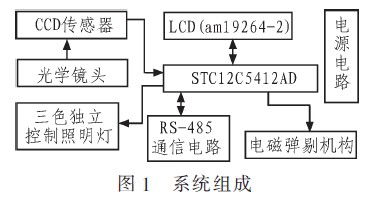
光學(xué)鏡頭與CCD構(gòu)成圖像采集電路,其線(xiàn)陣與輸送帶平行。三色獨(dú)立控制照明燈為CCD提供所需的恒定一致的光源,其紅、綠、藍(lán)三色可分別控制。LCD用于顯示工作狀態(tài)和參數(shù)設(shè)置,STC12C5412AD是系統(tǒng)的核心,不但模擬CCD工作所需的驅(qū)動(dòng)脈沖,還要對(duì)成像數(shù)據(jù)進(jìn)行分析判斷,按設(shè)定數(shù)據(jù)控制三色照明燈工作,并通過(guò)異步串行半雙工RS-485通信線(xiàn)路控制傳送帶的速度與系統(tǒng)的處理能力同步。電磁彈剔機(jī)構(gòu)將圖像識(shí)別系統(tǒng)認(rèn)為不合格品剔出傳送帶。
由專(zhuān)用機(jī)構(gòu)將預(yù)留蠶種的繭輸入到傳送帶上,通過(guò)振動(dòng),使蠶繭的軸向與傳送的運(yùn)動(dòng)方向一致,排成一列,送至圖像識(shí)別系統(tǒng)。
被檢繭通過(guò)鏡頭在CCD上成像,MCU按設(shè)定數(shù)據(jù)控制三色照明燈工作并啟動(dòng)CCD拍攝,經(jīng)CCD內(nèi)部AD轉(zhuǎn)換器對(duì)各個(gè)感光像素元進(jìn)行數(shù)字化,并送至相應(yīng)存儲(chǔ)器,供單片機(jī)讀取。占用像素元的數(shù)量與體形大小成正比,像素的數(shù)值與亮度成反比。一屏圖像2 160像素元,常被三只繭的成像所占用。MCU讀出繭在CCD的成像數(shù)據(jù),選擇其中一個(gè)完整的,分析所占像素和亮度值,得出體形數(shù)據(jù)和體色數(shù)據(jù),并與設(shè)定的數(shù)據(jù)相比較,判定是否合格,不合格者則剔出傳送帶。
優(yōu)良的繭體型大、圓潤(rùn)飽滿(mǎn)、色澤明亮潔白,當(dāng)繭內(nèi)蛹有病或已死掉時(shí),外觀(guān)色澤暗淡,有時(shí)帶有色斑。首先將優(yōu)質(zhì)繭與劣質(zhì)繭放在CCD進(jìn)行測(cè)量。MCU不斷調(diào)整三色照明燈各色的比例,并讀出相應(yīng)的成像數(shù)據(jù)進(jìn)行分析比對(duì),經(jīng)LCD(am19264—2)模擬成像。當(dāng)優(yōu)質(zhì)和劣質(zhì)繭的成像亮度值差最大時(shí),優(yōu)質(zhì)和劣質(zhì)繭的成像亮度值的中值以及所占用的像素?cái)?shù)即是判斷繭合格與否的依據(jù),三色照明燈的值即為設(shè)定值。
2 硬件電路設(shè)計(jì)
2.1 器件選擇
CCD傳感器采用日本東芝生產(chǎn)的高靈敏度、暗電流小、高速的TCD1208AP。TCD1208AP使用+5 V單電源,2 160像素元,長(zhǎng)寬14μm×14μm,輸入信號(hào)有二相CCD時(shí)鐘脈沖。一路轉(zhuǎn)移脈沖和一路復(fù)位脈沖,輸出有信號(hào)輸出和補(bǔ)償輸出,一行輸出2 212像元組成。圖2為T(mén)CD1208AP驅(qū)動(dòng)時(shí)序。

單片機(jī)選用高性能28PDIP封裝的STC12C5412AD。STC12C5412AD是新型的采用1T流水線(xiàn)/精簡(jiǎn)指令集結(jié)構(gòu),兼容MS51系列單片機(jī),工作電壓3.4~5.5 V,工作頻率高達(dá)35 MHz,相當(dāng)于普通MS51系列單片機(jī)420 MHz.12 K的用戶(hù)應(yīng)用程序空間和512字節(jié)在片內(nèi)RAM,并支持ISP和IAP編程,特別是內(nèi)部集成了E2PROM、MAX810專(zhuān)用復(fù)位電路、可編程看門(mén)狗電路、四路8 bit PWM輸出,8路10bit A/D高速轉(zhuǎn)換電路等實(shí)用特色電路,有效提高了新產(chǎn)品的可靠性。
顯示屏選用192x64點(diǎn)陣的蘭背光LCD AM19264。因CCD像元較多,LCD點(diǎn)陣少,通過(guò)多屏顯示一幀完成的圖像。該功能僅用于系統(tǒng)調(diào)試。
2.2 電路接口設(shè)計(jì)
圖3為T(mén)CD1208AP驅(qū)動(dòng)電路。SH為CCD光電荷轉(zhuǎn)移脈沖,其下跳沿即每幅圖像輸出的起始位。CLK1、CLK2為兩相交互脈沖電壓(相位差180°),它們將轉(zhuǎn)換到移位寄存器上光電荷向輸出極傳送。RS為復(fù)位脈沖,清除移位寄存器輸出電荷后所余電荷,為下一次輸出作準(zhǔn)備。OS為CCD的信號(hào)輸出,DOS為CCD的補(bǔ)償輸出。

圖4為電磁彈剔控制電路。主要功能是將經(jīng)圖像識(shí)別系統(tǒng)確定不符合要求的繭彈出傳送帶。

圖5為紅(R)、綠(G)、藍(lán)(B)三色照明電路中的紅燈一路,由PWM_R驅(qū)動(dòng)。綠、藍(lán)由PWM_G、PWM_B驅(qū)動(dòng),電路與紅燈控制線(xiàn)路一樣。通過(guò)改變脈沖寬度實(shí)現(xiàn)亮度的調(diào)整。通過(guò)改變?nèi)珶舨煌炼冉M合,實(shí)現(xiàn)特定的光色輸出,使CCD靈敏度最高,提高系統(tǒng)識(shí)別的準(zhǔn)確率。
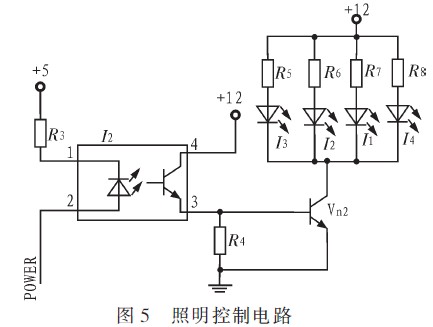
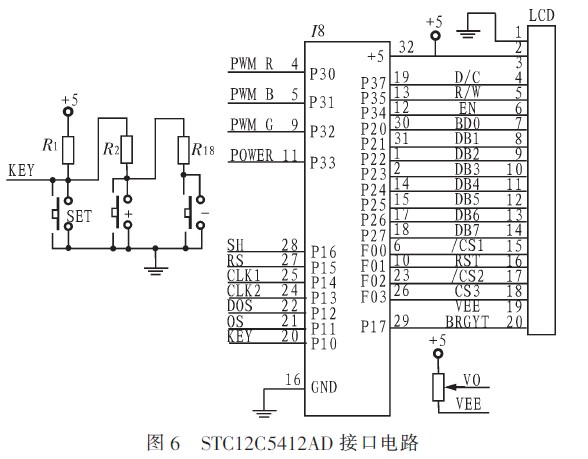
圖6為單片機(jī)的接口驅(qū)動(dòng)電路。LCD連接點(diǎn)陣液晶顯示屏AMl9264,用于設(shè)置控制參數(shù)的顯示和調(diào)試時(shí)模擬顯示成像結(jié)果。P1.0、P1.1、P1.2工作在A(yíng)/D轉(zhuǎn)換模式。按鍵采用分壓式結(jié)構(gòu),按下其中不同的鍵,在KEY端表現(xiàn)為不同的電壓,由單片機(jī)內(nèi)部集成的A/D轉(zhuǎn)換電路的P1.0數(shù)字化后進(jìn)行按鍵功能識(shí)別。按鍵用于工作參數(shù)設(shè)置和系統(tǒng)調(diào)試。P1.1和P1.2分別對(duì)CCD傳感器輸出信號(hào)和補(bǔ)償信號(hào)進(jìn)行模數(shù)轉(zhuǎn)換,處理后形成模擬圖像,通過(guò)LCD模擬顯示,并根據(jù)設(shè)置條件驅(qū)動(dòng)相應(yīng)電路工作。可調(diào)電位器P2用于調(diào)整LCD的對(duì)比度。
3 軟件系統(tǒng)設(shè)計(jì)
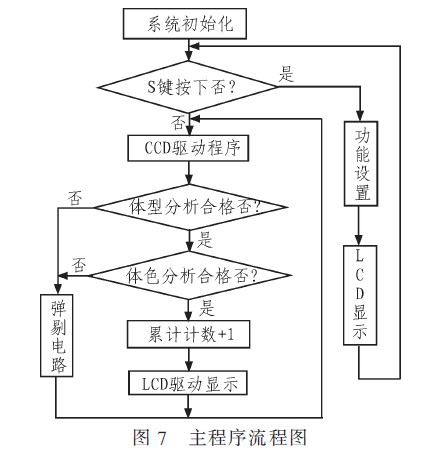
單片機(jī)控制程序采用Kile C51 V7.0編寫(xiě),全部模塊化結(jié)構(gòu),嵌入了看門(mén)狗、軟件濾波等抗干擾措施。系統(tǒng)軟件由主程序、初始化程序、CCD驅(qū)動(dòng)程序、LCD驅(qū)動(dòng)程序、體形分析、體色分析和按鍵設(shè)置程序等幾個(gè)模塊組成。主程序流程圖如圖7所示。
體形分析、體色分析程序是系統(tǒng)的關(guān)鍵。要完成繭體形分析,需要CCD對(duì)縱向圖像采樣7次以上,采樣次數(shù)代表它的直徑,縱向占用像素最多一幀則代表繭的最大長(zhǎng)度。這一參數(shù)與桑蠶選種生產(chǎn)線(xiàn)傳送帶運(yùn)行速度和MCU的性能密切相關(guān)。體形分析程序則與光的泄漏、三色照明燈的衰減、繭的個(gè)體差異、生產(chǎn)線(xiàn)傳送帶運(yùn)行速度等相關(guān)。通過(guò)在實(shí)踐中不斷修改程序,完善功能,協(xié)調(diào)各項(xiàng)參數(shù),最終達(dá)到基本目標(biāo)。
4 結(jié)束語(yǔ)
通過(guò)將微處理器與線(xiàn)陣圖像傳感器的有機(jī)結(jié)合,對(duì)軟件系統(tǒng)的合理設(shè)計(jì),初步實(shí)現(xiàn)了桑蠶選種的自動(dòng)識(shí)別,提高了生產(chǎn)效率。經(jīng)實(shí)際運(yùn)行,該項(xiàng)目設(shè)計(jì)合理,運(yùn)行可靠,成本低廉。在22只/秒速度時(shí),識(shí)別準(zhǔn)確率高達(dá)99%,在25只/秒速度時(shí)識(shí)別準(zhǔn)確率降為92%。但系統(tǒng)還存在以下兩問(wèn)題:1)初始化數(shù)據(jù)有很多人為和環(huán)境因素,難以共享,不易推廣;2)識(shí)別速度和準(zhǔn)確性還待有識(shí)之士,協(xié)助共同解決。