
CAN采用多主工作方式,節(jié)點(diǎn)之間不分主從,但節(jié)點(diǎn)之間有優(yōu)先級(jí)之分,通信方式靈活,可實(shí)現(xiàn)點(diǎn)對(duì)點(diǎn)、一點(diǎn)對(duì)多點(diǎn)及廣播方式傳輸數(shù)據(jù),無(wú)需調(diào)度。也就是說(shuō),它可向系統(tǒng)中的所有節(jié)點(diǎn)進(jìn)行報(bào)文發(fā)送廣播,即CAN系統(tǒng)中的每個(gè)節(jié)點(diǎn)均同時(shí)接收到同樣的數(shù)據(jù)。缺省情況下,CAN是基于報(bào)文而非地址的。系統(tǒng)采用分布式控制實(shí)現(xiàn)方法集成了多節(jié)點(diǎn)(見(jiàn)圖1a所示分布式網(wǎng)絡(luò))。這種拓?fù)浣Y(jié)構(gòu)的好處之一是,節(jié)點(diǎn)的增加和去除非常簡(jiǎn)單,對(duì)軟件的影響也很小。CAN網(wǎng)絡(luò)要求每個(gè)節(jié)點(diǎn)均具備智能,但智能化水平可根據(jù)節(jié)點(diǎn)所承載的任務(wù)進(jìn)行調(diào)整。因此CAN系統(tǒng)中使用的單片機(jī)通常較簡(jiǎn)單并且引腳數(shù)也較少。圖1a進(jìn)一步顯示了CAN網(wǎng)絡(luò)可實(shí)現(xiàn)分布式網(wǎng)絡(luò),從系統(tǒng)中增加或刪除節(jié)點(diǎn)只需改變少量的固件。由于使用的導(dǎo)線較少并且采用分散式智能,而且CAN網(wǎng)絡(luò)還具有較高的可靠性。這是與需用星形配置實(shí)現(xiàn)集中控制(見(jiàn)圖1b所示集中式網(wǎng)絡(luò))的以太網(wǎng)區(qū)別所在。
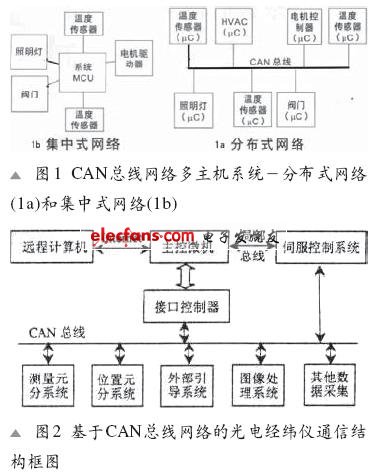
其圖1進(jìn)一步顯示了,在多任務(wù)網(wǎng)絡(luò)中,集中式網(wǎng)絡(luò)通常用于以太網(wǎng)系統(tǒng),如果在系統(tǒng)中增加節(jié)點(diǎn),則要求對(duì)系統(tǒng)MCU(多芯片單元)作很大的變動(dòng);而CAN網(wǎng)絡(luò)可實(shí)現(xiàn)分布式網(wǎng)絡(luò),從系統(tǒng)中增加或刪除節(jié)點(diǎn)只需改變少量的固件。
CAN采用的是非破壞性總線仲裁技術(shù)。按優(yōu)先級(jí)發(fā)送,可以大大節(jié)省總線沖突仲裁時(shí)間。而CAN總線上的通信結(jié)構(gòu)與實(shí)現(xiàn)技術(shù)如下述:
·CAN采用短幀結(jié)構(gòu)傳輸,每幀有效字段為6-8個(gè),傳輸時(shí)間短,受干擾的概率低。而且每幀信息都有CRC校驗(yàn)和其他檢錯(cuò)措施,保證數(shù)據(jù)出錯(cuò)率極低。當(dāng)節(jié)點(diǎn)嚴(yán)重錯(cuò)誤時(shí),具有自動(dòng)關(guān)閉功能,使總線上其他節(jié)點(diǎn)不受影響。可見(jiàn),CAN是所有總線中最為可靠的。
·CAN總線上的通信是通過(guò)報(bào)文幀來(lái)實(shí)現(xiàn)的。幀有三種類(lèi)型,即數(shù)據(jù)幀、遠(yuǎn)程幀和錯(cuò)誤幀。每一個(gè)幀內(nèi)部都具備一些字段,對(duì)發(fā)送的幀類(lèi)型做出定義并提供相關(guān)信息。比如,數(shù)據(jù)幀由6個(gè)字段組成,分別是:仲裁字段、控制字段、數(shù)據(jù)宇段、CRC(循環(huán)冗余校驗(yàn))宇段、確認(rèn)字段以及幀結(jié)束。在幀發(fā)送期間,仲裁字段被網(wǎng)絡(luò)中的每個(gè)節(jié)點(diǎn)用來(lái)識(shí)別和/或解決沖突。仲裁字段還用來(lái)識(shí)別報(bào)文的類(lèi)型及其發(fā)送目的地。控制字段定義了數(shù)據(jù)幀的長(zhǎng)度。數(shù)據(jù)幀包含數(shù)據(jù),其字節(jié)數(shù)在控制宇段中作了規(guī)定。CRC字段用來(lái)檢測(cè)數(shù)據(jù)錯(cuò)誤。最后,每次發(fā)送均需取得CAN網(wǎng)絡(luò)上所有接收節(jié)點(diǎn)的確認(rèn)幀。
基于CAN總線網(wǎng)絡(luò)的光電經(jīng)緯儀通信方案
經(jīng)緯儀利用激光、紅外、電視、雷達(dá)等探測(cè)器獲得運(yùn)動(dòng)目標(biāo)在其視場(chǎng)內(nèi)與視場(chǎng)中心的變化偏差,再通過(guò)伺服控制系統(tǒng)進(jìn)行校正跟蹤,使儀器瞄準(zhǔn)該目標(biāo)并引導(dǎo)其他跟蹤設(shè)備或根據(jù)激光測(cè)距和儀器本身位置數(shù)據(jù)計(jì)算出運(yùn)動(dòng)目標(biāo)的精確軌跡。
經(jīng)緯儀系統(tǒng)風(fēng)險(xiǎn)是主控制機(jī)要負(fù)擔(dān)大量的數(shù)據(jù)計(jì)算和交換任務(wù),控制功能不能分散,導(dǎo)致任務(wù)風(fēng)險(xiǎn)集中于主控制機(jī),一旦主機(jī)出現(xiàn)問(wèn)題將導(dǎo)致整個(gè)系統(tǒng)設(shè)備癱瘓。那種傳統(tǒng)點(diǎn)對(duì)點(diǎn)的連接方式不僅使接口結(jié)構(gòu)復(fù)雜而且大量的電纜也增加了設(shè)備內(nèi)部的電磁輻射和干擾,設(shè)備的體積龐大,布線的難度高。
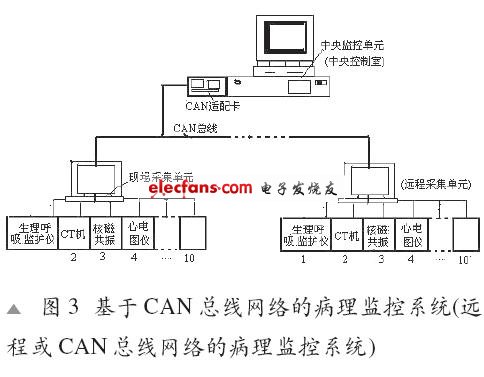
基于CAN總線網(wǎng)絡(luò)的光電經(jīng)緯儀結(jié)構(gòu)框圖如圖2所示。
其結(jié)構(gòu)特征:使用單一的串行總線結(jié)構(gòu)代替了多種通信方式的并行結(jié)構(gòu)。主控制機(jī)所需信息可以從CAN總線上取得圖像處理、位置元。其它數(shù)據(jù)采集等分系統(tǒng)通過(guò)CAN總線與主控制機(jī)交換數(shù)據(jù)的同時(shí)還可以從總線上直接獲取其他分系統(tǒng)的數(shù)據(jù),這不僅提高了總線利用率、數(shù)據(jù)傳輸?shù)膶?shí)時(shí)性還減輕了主控制機(jī)的壓力、提高了系統(tǒng)工作的穩(wěn)定性。所有的分系統(tǒng)都可以通過(guò)一對(duì)雙絞線串接在一起,節(jié)省了空間、簡(jiǎn)化了布線。由于CAN總線本身所具有的突出特性,設(shè)備的抗干擾性、可靠性、實(shí)時(shí)性等幾項(xiàng)指標(biāo)均能得到提高。CAN總線網(wǎng)絡(luò)在醫(yī)療機(jī)械上的應(yīng)用-病理分布式監(jiān)控系統(tǒng)(或病理遠(yuǎn)程式監(jiān)控系統(tǒng))
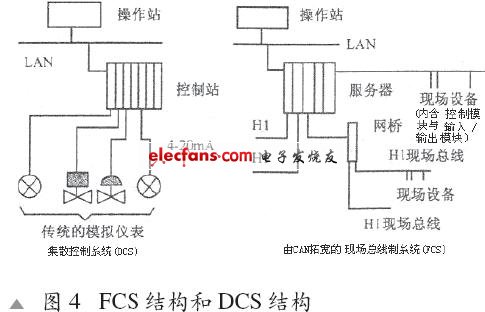
病理分布式(或遠(yuǎn)程式)監(jiān)控系統(tǒng)分別由中央控制式的中央監(jiān)控單元和現(xiàn)埸采集單元(或遠(yuǎn)程采集單元)組成(圖3)。 現(xiàn)埸采集單元對(duì)醫(yī)院各室診斷測(cè)量?jī)x器(或設(shè)備)進(jìn)行數(shù)據(jù)、圖像的實(shí)時(shí)采集,同時(shí)完成數(shù)據(jù)統(tǒng)計(jì)、存貯; 中央監(jiān)控單元可以定期或不定期地從現(xiàn)埸采集單元獲取數(shù)據(jù)并完成圖像監(jiān)測(cè)、數(shù)據(jù)統(tǒng)計(jì)、報(bào)表、打印及數(shù)據(jù)庫(kù)管理。中央監(jiān)控單元和現(xiàn)埸采集單元之間通過(guò)CAN總線連接在一起,在這個(gè)網(wǎng)絡(luò)中, 中央監(jiān)控單元處于主控位置,而現(xiàn)埸采集單元可以隨時(shí)響應(yīng)中央監(jiān)控單元的命令。其現(xiàn)埸采集單元由單片機(jī)8C552及采集、存儲(chǔ)、顯示、遙控和通信模塊組成,每個(gè)現(xiàn)埸采集單元可與10個(gè)測(cè)量?jī)x器(或設(shè)備)相接。
該病理分布式監(jiān)控系統(tǒng)可拓寬為病理遠(yuǎn)程式監(jiān)控系統(tǒng),可以監(jiān)控一個(gè)都市內(nèi)的各大醫(yī) 院或幾個(gè)城市的中心醫(yī)院。
拓寬CAN應(yīng)用的現(xiàn)場(chǎng)總線控制系統(tǒng)(FCS)
基于CAN總線結(jié)構(gòu)性能與應(yīng)用,可以拓寬出應(yīng)用CAN的現(xiàn)場(chǎng)總線控制系統(tǒng)(FCS)所具的優(yōu)越性,即大大提高了準(zhǔn)確性與可靠性。
由于現(xiàn)場(chǎng)總線設(shè)備的智能化、數(shù)字化,與模擬信號(hào)相比,它從根本上提高了測(cè)量與控制的精確度,減少了傳送誤差。同時(shí),由于系統(tǒng)的結(jié)構(gòu)簡(jiǎn)化,設(shè)備與連線減少,現(xiàn)場(chǎng)儀表內(nèi)部功能加強(qiáng),減少了信號(hào)的往返傳輸,提高了系統(tǒng)的工作可靠性。此外,由于它的設(shè)備標(biāo)準(zhǔn)化,功能模塊化,因而還具有設(shè)計(jì)簡(jiǎn)單,易于重構(gòu)等優(yōu)點(diǎn)。
為此, 通過(guò)圖4所示可以對(duì)該類(lèi)應(yīng)用CAN的現(xiàn)場(chǎng)總線控制系統(tǒng)(FCS)與集散控制系統(tǒng)(DCS)作出比較,進(jìn)而說(shuō)明FCS的優(yōu)點(diǎn)。在圖4中,可看出其FCS打破了DCS的結(jié)構(gòu)形式,這是因?yàn)椋旱谝唬現(xiàn)CS采用了智能設(shè)備,把原先DCS系統(tǒng)中處于控制室的控制模塊、輸入/輸出模塊置于現(xiàn)場(chǎng)設(shè)備中,實(shí)現(xiàn)了徹底的分散控制;第二,采用數(shù)字信號(hào)代替模擬信號(hào),可以實(shí)現(xiàn)一對(duì)電線上傳輸多個(gè)信號(hào),同時(shí)可以為多個(gè)設(shè)備供電,這樣為簡(jiǎn)化系統(tǒng)結(jié)構(gòu)、節(jié)約硬件設(shè)備、節(jié)約連接電纜與各種安裝、維護(hù)費(fèi)用創(chuàng)造了條件。
結(jié)語(yǔ)
CAN總線能通過(guò)仲裁劃分報(bào)文的優(yōu)先級(jí),其硬件和數(shù)據(jù)鏈接層的配置靈活,設(shè)計(jì)時(shí)可對(duì)許多發(fā)送細(xì)節(jié)進(jìn)行更改,而更改后整個(gè)系統(tǒng)的數(shù)據(jù)一致性仍然能夠得到保證。