
一、引言
機(jī)械式停車設(shè)備行業(yè)在我國(guó)是近十幾年來(lái)發(fā)展起來(lái)的新興行業(yè)。隨著我國(guó)人民生活的不斷提高和汽車工業(yè)的高速發(fā)展,機(jī)械式停車設(shè)備以其獨(dú)有的優(yōu)越性,最近幾年得到了廣泛的應(yīng)用。智能電梯式機(jī)械停車設(shè)備是自動(dòng)化程度較高的機(jī)械式停車設(shè)備,為了能在提高空間利用率的同時(shí)又保證較高的存取車效率,對(duì)停車設(shè)備的設(shè)計(jì)、制造、安裝都要求有更高的標(biāo)準(zhǔn),電氣控制系統(tǒng)也更具難度。本文介紹了我單位改造的上海國(guó)際金陵大廈智能化電梯式機(jī)械停車設(shè)備電氣控制系統(tǒng)的設(shè)計(jì)。
二、總體方案設(shè)計(jì)
智能化電梯式機(jī)械停車設(shè)備采用目前國(guó)內(nèi)最先進(jìn)的智能控制系統(tǒng),司機(jī)只要將車開到旋轉(zhuǎn)升降臺(tái)上,控制系統(tǒng)便自動(dòng)安全地將其輸送到指定的空車位,完成整個(gè)停車過(guò)程。采用電梯式停車設(shè)備,無(wú)論從高度、技術(shù)水平還是整個(gè)建設(shè)規(guī)模,是創(chuàng)造更多空間的最佳選擇。上海國(guó)際金陵大廈的電梯式機(jī)械停車設(shè)備的停車層采用鋼結(jié)構(gòu),分布在電梯行走的中央通道的兩側(cè),每層停車層由左右各2個(gè)停車位組成,每個(gè)車位上均設(shè)置有停車定位架。升降機(jī)的總提升高度達(dá)42米。電梯式立體車庫(kù)平面總圖如圖1所示。
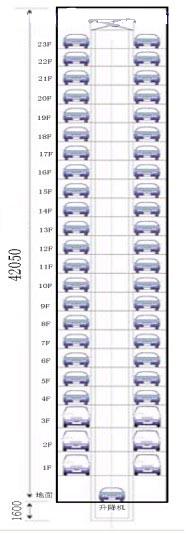
圖1 電梯式立體車庫(kù)平面總圖
1.主要技術(shù)性能指標(biāo)設(shè)計(jì)
(1)停車標(biāo)準(zhǔn)尺寸(L×W×H):5050mm×1850mm×1550mm。
(2)停車數(shù)量:46。
(3)停車重量:1700Kg。
(4)升降電機(jī)功率:22kW;速度:120m/min。橫移電機(jī)功率:2.2?kW;速度:20m/min。轉(zhuǎn)臺(tái)電機(jī)功率:1.5kW;速度:4r/min。
(5)控制方式:PLC控制。
(6)操作方式:IC卡、觸摸屏、按鈕箱。
(7)存取時(shí)間:平均85s。
2.設(shè)備特點(diǎn)分析
(1)占地少,容車量大,高層設(shè)計(jì)最高能夠達(dá)到平均一輛車僅占一平方米的空間。
(2)安全性好,采用多重安全保護(hù)裝置確保設(shè)備運(yùn)行安全。
(3)車輛存取速度快、效率高,車輛存取最長(zhǎng)時(shí)間≤120秒。
(4)采用變頻調(diào)速技術(shù),智能化程度高,可預(yù)約存取車、上下班高峰存取車和空車位導(dǎo)向。
(5)存取車輛均向前開,無(wú)需倒車。
(6)計(jì)費(fèi)、監(jiān)控、檢測(cè)全智能化,管理人員少。
三、控制系統(tǒng)工作原理
這套全自動(dòng)化系統(tǒng)的技術(shù)核心設(shè)備是升降機(jī)和鏟車,司機(jī)存取車時(shí),操作員不必具備專業(yè)技能,只需將車開到進(jìn)出口層的旋轉(zhuǎn)工作臺(tái)上,控制系統(tǒng)將自動(dòng)發(fā)出指令,旋轉(zhuǎn)工作臺(tái)自動(dòng)旋轉(zhuǎn)到升降機(jī)位置,然后升降機(jī)上升至要停放的樓層,升降機(jī)上的鏟車把車輛送到規(guī)定的停車位置,完成存車動(dòng)作。取車過(guò)程則相反,由于在車庫(kù)的進(jìn)出口室設(shè)置了一部自動(dòng)轉(zhuǎn)盤,使司機(jī)取車時(shí)不用倒車出庫(kù)。整個(gè)停車庫(kù)系統(tǒng)還配有停車收費(fèi)管理系統(tǒng),停車監(jiān)控系統(tǒng),停車報(bào)表打印系統(tǒng)等。控制系統(tǒng)總體方案圖如圖2所示。

圖2 控制系統(tǒng)總體方案圖
四、控制系統(tǒng)硬件設(shè)計(jì)
控制器采用三菱AnS系列的PLC,它是專為順序控制和數(shù)學(xué)運(yùn)算而開發(fā)的控制器。AnS系列的PLC提供多種網(wǎng)絡(luò)系統(tǒng)組合和特殊功能組件,使其更完美地適用于過(guò)程控制、定位控制和其它各種類型的控制。本系統(tǒng)中下位機(jī)PLC模塊和各部件的功能:底板(A1S38B)、電源模塊(A1S61PN)、控制單元(A2USH-CPU-S1)、輸入模塊:A1SX42(傳感器和按鈕輸入信
號(hào))、輸出模塊(A1SY10—控制輸出的信號(hào))、網(wǎng)絡(luò)通信模塊(A1SJ71AP21—進(jìn)行網(wǎng)絡(luò)通信)、高速計(jì)數(shù)模塊(A1SD62—編碼器讀數(shù)計(jì)數(shù))、模擬量輸入模塊(A1S64AD—變頻反饋信號(hào))、模擬量輸出模塊(A1S62DA—變頻輸出信號(hào))、串口通訊組件(A1SJ71UC24-R2— 觸摸屏連接的通訊接口);上位機(jī)PLC模塊和功能:底板(A1S38B)、電源模塊(A1S61PN)、控制單元(A2USH-CPU-S1)、輸入模塊(A1SX42-傳感器和按鈕輸入信號(hào))、輸出模塊(A1SY10—控制輸出的信號(hào))、網(wǎng)絡(luò)模塊(A1SJ71AP21—進(jìn)行網(wǎng)絡(luò)通信)、通訊組件(A1SJ71UC24-R2—操作界面連接的通訊接口)、通訊組件(A1SJ71UC24-R2—打印機(jī)連接的通訊接口)。
根據(jù)實(shí)際應(yīng)用情況,現(xiàn)場(chǎng)傳感器網(wǎng)絡(luò)設(shè)計(jì)包括16路傳感器輸入點(diǎn)信號(hào)連接到4個(gè)TM-4NC輸入單元,通過(guò)長(zhǎng)距離通訊線連接到TM-S16通訊單元,然后連接到PLC的輸入模塊,注意配置正確的通訊單元參數(shù)。升降電機(jī)的變頻器采用富士公司的矢量變頻器FVRVG5S-2A-37?kW,鏟車變頻器采用三菱公司的FR-A520-5.5kW。
五、控制系統(tǒng)軟件設(shè)計(jì)
軟件部分的中心任務(wù)是上位PLC操作程序和下位PLC操作程序設(shè)計(jì)。上位PLC操作程序包括:操作顯示數(shù)據(jù)程序、存取報(bào)表打印程序、數(shù)據(jù)維護(hù)程序。下位操作程序包括:自動(dòng)存車操作子程序(P101)、自動(dòng)取車操作子程序(P102)、自動(dòng)存入空板子程序(P105)、自動(dòng)取出空板子程序(P106)、維修手柄操作程序、手動(dòng)操作存取程序、觸摸屏操作程序。軟件流程圖如圖3所示。

圖3 軟件流程圖
存取車程序操作設(shè)計(jì)了自動(dòng)、手動(dòng)、檢修、只存、只取操作方式。“只存”操作方式應(yīng)用在上班高峰時(shí),此時(shí)主要是存入車輛;“只取”操作方式應(yīng)用在下班高峰時(shí),此時(shí)主要是取出車輛。上位機(jī)的應(yīng)用軟件對(duì)系統(tǒng)的報(bào)警和實(shí)時(shí)工作狀態(tài)進(jìn)行處理分析使操作管理人員充分了解停車場(chǎng)車位的可用數(shù)量、具體位置及用戶分類等,使操作管理人員合理調(diào)度,合理科學(xué)地對(duì)車場(chǎng)進(jìn)行管理。
六、控制系統(tǒng)關(guān)鍵技術(shù)說(shuō)明
1.升降機(jī)定位設(shè)計(jì)
升降機(jī)采用高速變頻矢量控制。采用編碼器(1200P/R)和定位地址芯片技術(shù),應(yīng)用輸入中斷處理,并根據(jù)不同的存取層調(diào)用不同的速度曲線數(shù)據(jù),每層的定位精度可達(dá)到±5mm,平均存取車輛時(shí)間為98秒。低速定位時(shí)矢量變頻的速度為50Hz~10Hz,矢量變頻高速運(yùn)行時(shí)的速度為700Hz,加減速時(shí)變頻輸出速度按PLC數(shù)據(jù)運(yùn)算表輸出,保證加減速平穩(wěn)。升降機(jī)矢量變頻控制如圖4所示。

圖4 升降機(jī)矢量變頻控制圖
矢量變頻控制符號(hào)說(shuō)明:
FWD——PLC輸出控制的變頻正轉(zhuǎn)指令(升降機(jī)上升);
REV——PLC輸出控制的變頻反轉(zhuǎn)指令(升降機(jī)下降);
X1——PLC輸出控制的變頻預(yù)激磁指令;
X2——PLC輸出控制的變頻停止指令;
X3——PLC輸出控制的負(fù)載補(bǔ)償偏置(+)指令;
X4——PLC輸出控制的負(fù)載補(bǔ)償偏置(-)指令;
RYA——變頻器運(yùn)行有速度時(shí),輸出信號(hào)到PLC;
30B——變頻器運(yùn)行錯(cuò)誤時(shí),輸出報(bào)警信號(hào)到PLC;
I2、I1——PLC特殊功能模塊A1S62DA輸出模擬信號(hào)(0~10V)控制矢量變頻速度;
A0、N——變頻負(fù)荷反饋信號(hào)(0~10V)輸入到PLC特殊功能模塊A1S64AD。
2.高速計(jì)數(shù)模塊應(yīng)用設(shè)計(jì)
選用高速計(jì)數(shù)特殊功能模塊A1SD62。當(dāng)接通電源或PLC復(fù)位時(shí),初始值被寫入緩存中,它有2個(gè)通道的高速計(jì)數(shù),A1SD62共使用32點(diǎn)輸入和 32點(diǎn)輸出信號(hào),比如系統(tǒng)使用X20-X3F、Y20-Y3F,那么Y34是CH1計(jì)數(shù)允許命令,Y3B是CH2計(jì)數(shù)允許命令。CH1?的采樣計(jì)數(shù)值緩存地址是4、5,CH2?的采樣計(jì)數(shù)值緩存地址是36、37。兩個(gè)通道高速計(jì)數(shù)的程序如圖5所示。
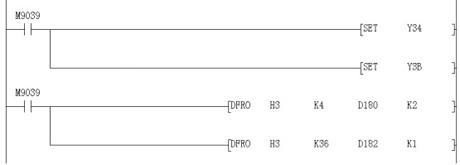
圖5 高速計(jì)數(shù)程序
3.?dāng)?shù)字-模擬變換模塊應(yīng)用設(shè)計(jì)
選用D/A特殊功能模塊A1S62DA。它有2個(gè)通道的D/A轉(zhuǎn)換,并設(shè)定數(shù)值的分辨率為1/4000,當(dāng)數(shù)值為4000時(shí),對(duì)應(yīng)的模擬輸入值為 10V,數(shù)值為2000時(shí),對(duì)應(yīng)的模擬輸入值為5V;數(shù)值為0時(shí),對(duì)應(yīng)的模擬輸入值為0V。A1S62DA共使用32點(diǎn)輸入和32點(diǎn)輸出信號(hào),比如系統(tǒng)使用X0-X1F、Y00-Y1F,那么X1是D/A變換器準(zhǔn)備好標(biāo)志,X2是出錯(cuò)標(biāo)志,Y10是CH1?D/A變換值輸出允許標(biāo)志,Y11是CH2?D /A變換值輸出允許標(biāo)志,Y18是D/A模塊出錯(cuò)復(fù)位標(biāo)志,比如兩個(gè)通道模擬量輸出的程序如圖6所示。
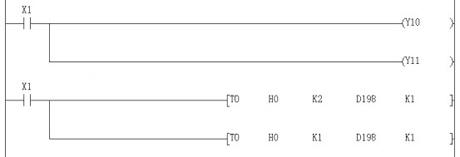
圖6 模擬量輸出程序
4.上位機(jī)和下位機(jī)通訊網(wǎng)絡(luò)設(shè)計(jì)
上位機(jī)和下位機(jī)的通訊通過(guò)網(wǎng)絡(luò)通訊模塊A1SJ71AP21連接。需要在軟件中設(shè)置網(wǎng)絡(luò)參數(shù)。選擇MelsecNet網(wǎng)絡(luò),上位機(jī)設(shè)置網(wǎng)絡(luò)類型是 MNET?II-主站點(diǎn),起始I/O號(hào)為0120總站數(shù)為1。然后進(jìn)行網(wǎng)絡(luò)范圍分配,設(shè)置主站的發(fā)信范圍為W0000~W01FF,從站的發(fā)信范圍為 W0200~W03FF。下位機(jī)設(shè)置網(wǎng)絡(luò)類型是MNET?II-本地站點(diǎn),起始I/O號(hào)為0120。
七、結(jié)束語(yǔ)
通過(guò)調(diào)試運(yùn)行,整個(gè)停車設(shè)備的結(jié)構(gòu)緊湊、設(shè)計(jì)合理、運(yùn)行良好,充分發(fā)揮了AnS系列PLC控制器的高可靠性、強(qiáng)功能性等特點(diǎn),特別是AnS系列PLC 的特殊功能模塊在停車設(shè)備中的應(yīng)用具有推廣價(jià)值,對(duì)同行業(yè)的機(jī)械式智能化電梯式停車設(shè)備的設(shè)計(jì)具有借鑒意義。這種類型的停車設(shè)備,不僅在有效節(jié)約地域空間基礎(chǔ)上科學(xué)解決了停車占地難題,而且還提升主體建筑的價(jià)值。高智能化、自動(dòng)化程度高、綠色環(huán)保等特征在行業(yè)中都有較領(lǐng)先的優(yōu)勢(shì),特別使用于城市立體車庫(kù)的建造。