
引言
概述隨著電子技術(shù)的發(fā)展和應(yīng)用,汽車的安全性、舒適性和智能性越來越高。汽車側(cè)向傾斜角度傳感器的應(yīng)用是防止汽車在行駛中發(fā)生傾翻事故的一種有效方法,是提高汽車安全性的重要措施,特別是越野車、雙層客車等重心較高的汽車更有必要。
汽車傾翻的實(shí)質(zhì)是:行駛中向外的傾翻力矩大于向里的穩(wěn)定力矩,當(dāng)重心高度一定時(shí),傾翻力矩由傾翻力(向外的側(cè)向力)決定。根據(jù)物理學(xué)知識(shí),傾翻力由路面的側(cè)向(亦稱橫向)坡度產(chǎn)生的下滑力F1和轉(zhuǎn)彎時(shí)所受向心力F2共同作用所產(chǎn)生,具體如下:
式中
m——汽車質(zhì)量
g——重力加速度
α——路面與水平面的側(cè)向夾角
v——汽車行駛速度
R——轉(zhuǎn)彎半徑
由以上2式可知,為了減小傾翻力,只有減小v是可行的,而且F2v2。根據(jù)牛頓第三運(yùn)動(dòng)定律,轉(zhuǎn)彎時(shí)汽車在受到向心力作用的同時(shí),產(chǎn)生與向心力大小相等、方向相反的離心力,因?yàn)槠囐|(zhì)量m是一定的,當(dāng)向心力不能滿足v2R的增大時(shí),傾翻力矩大于穩(wěn)定力矩,就會(huì)發(fā)生傾翻。
因此,應(yīng)降低車速,進(jìn)而減小傾翻力矩,將角度傳感器按擺動(dòng)方向在汽車上側(cè)向布置,根據(jù)角度傳感器產(chǎn)生的角位移,可得出汽車所受下滑力、向心力作用產(chǎn)生的傾翻力的大小,當(dāng)角位移達(dá)到預(yù)先設(shè)定的數(shù)值時(shí),使汽車減速。
1 角度傳感器
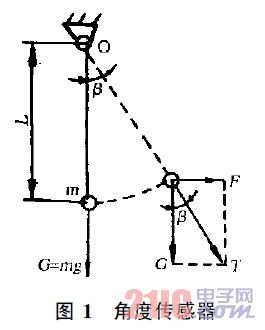
利用重力原理制造的角度傳感器如圖1所示。擺動(dòng)部分的質(zhì)量為m,重心距轉(zhuǎn)軸的距離為L,當(dāng)汽車車體傾斜或做曲線運(yùn)動(dòng)時(shí),均能使擺動(dòng)部分偏轉(zhuǎn)。設(shè)圖1中的受力分析是無任何摩擦的理想狀態(tài)下,力F為下滑力F1和向心力F2共同作用的結(jié)果,力F與傾翻力成正比,所產(chǎn)生的偏轉(zhuǎn)角度也就與傾翻力成正比。擺動(dòng)部分所受重力G與F的合力T是擺桿所受拉力,擺動(dòng)角度=tg-1(F/G),與L無關(guān),當(dāng)質(zhì)量m一定時(shí),只與F有關(guān),且成正比。實(shí)際上,由于存在轉(zhuǎn)軸等處的摩擦,則L越長,擺動(dòng)轉(zhuǎn)矩越大,精度越高。
角度傳感器在控制系統(tǒng)中通常作為采樣元件,其性能的優(yōu)劣對整個(gè)系統(tǒng)起著重要作用。電位器式角度傳感器已在各種控制系統(tǒng)中廣泛應(yīng)用,但它的缺點(diǎn)是存在觸點(diǎn)的滑動(dòng)磨損和電噪聲;磁敏電阻式角度傳感器是利用半導(dǎo)體技術(shù)制造的新型純電阻性元件,特點(diǎn)是無觸點(diǎn),當(dāng)擺動(dòng)部分偏轉(zhuǎn)時(shí),通過磁敏電阻的磁通量發(fā)生變化,使磁敏電阻的阻值發(fā)生數(shù)倍以上的變化,從根本上消除了電噪聲,并使精度得以提高。
各種角度傳感器都具有阻尼功能,使得對所測得角度的響應(yīng)有一個(gè)短暫的延時(shí)對控制系統(tǒng)來講是有益處的。
2 角度傳感器電路
圖2是側(cè)向傾斜角度傳感器的一種實(shí)用電路,主要由單電源運(yùn)算放大器(如LM324)組成,其作用是將角度傳感器中的電位器W1輸出的線性變化的模擬電量進(jìn)行處理、放大,能夠按規(guī)定輸出數(shù)字量和模擬量。令水平時(shí)電位器W1滑動(dòng)點(diǎn)Ui的電位為(12)Ec(Ec為穩(wěn)壓電源電壓,通常為9V或15V,下同),R1、R2、R3、R4為附加電阻,并使R1=R2,R3=R4,W2為調(diào)中電位器,阻值很小。調(diào)整W2,當(dāng)W1處于水平狀態(tài)時(shí),使運(yùn)放A1、A2輸出端電位為(12)Ec。運(yùn)放A1組成反相比例運(yùn)算放大器,作為電路的前置級放大,輸入電壓為Ui,輸出電壓U1=-(R7R5)Ui,且應(yīng)使R6=R5%R7;運(yùn)放A2組成反相器,電阻R10=R8,且應(yīng)使R9=R8%R10;輸出電壓U2=-U1=(R7R5)Ui。A1和A2的輸出端分別由發(fā)光二極管LED1、LED2組成或門電路輸出,使得汽車不論是左傾還是右傾,輸出端Uo1均能輸出與輸入量Ui(隨傾斜角度變化)成正比例線性關(guān)系的模擬信號(hào),即Uo1=(R7R5)|Ui|,去控制后面的電路或機(jī)構(gòu)。發(fā)光二極管還能指示傾斜方向,當(dāng)水平狀態(tài)時(shí),模擬量輸出端Uo1=(12)Ec:
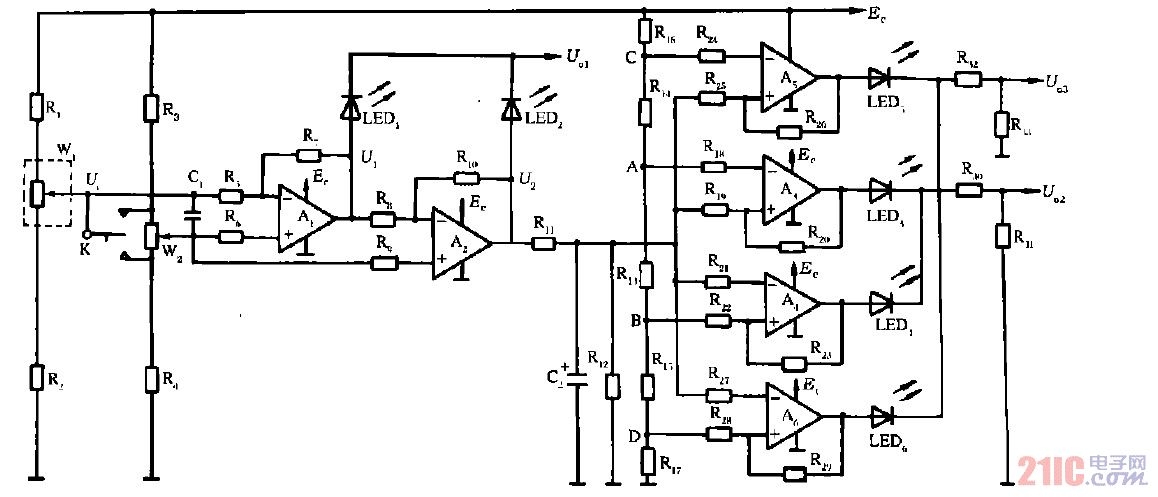
圖2 側(cè)向傾斜角度傳感器電路圖
運(yùn)放A3、A4和A5、A6分別組成窗口比較器,電阻R20、R23、R26、R29是阻值較大的正反饋電阻,以改善運(yùn)放的開關(guān)狀態(tài)工作性能,電阻R13~R17為分壓電阻,且應(yīng)R14=R15,R16=R17,電阻R13中點(diǎn)處的電位為(12)Ec,分壓電阻的阻值應(yīng)根據(jù)U2的變化所反應(yīng)的傾翻力決定,使得運(yùn)放A3和A5的反相輸入端、運(yùn)放A4和A6的同相輸入端獲得不同的開關(guān)轉(zhuǎn)換基準(zhǔn)電位,而且所反應(yīng)的左右傾斜程度是一致的。水平時(shí),U2=(12)Ec,運(yùn)放A3~A6均輸出低電平;傾斜時(shí),U2的電位發(fā)生變化,運(yùn)放A3~A6按規(guī)定要求輸出高電平。例如,電位器W1左擺時(shí),使U2電位升高,當(dāng)高于A點(diǎn)電位時(shí),運(yùn)放A3輸出高電平,二極管LED3顯示傾斜方向,若汽車?yán)^續(xù)向左傾斜,使U2電位繼續(xù)升高,當(dāng)高于C點(diǎn)電位時(shí),運(yùn)放A5輸出高電平,二極管LED5顯示傾斜方向且程度加重;同理,若電位器W1右擺,運(yùn)放A4和A6的工作亦如此。2個(gè)輸出端Uo2和Uo3輸出的數(shù)字信號(hào)所反映傾斜程度與傾斜方向無關(guān),很明顯,Uo3有高電平信號(hào)輸出時(shí),Uo2已經(jīng)輸出高電平,Uo3所反映的傾斜程度大于Uo2。
K為自動(dòng)復(fù)中位型扭子開關(guān),作為電路的檢驗(yàn)開關(guān),當(dāng)上下搬動(dòng)時(shí),應(yīng)分別使二極管LED2、LED3、LED5和LED1、LED4、LED6發(fā)亮。電容器C1為高頻旁路電容器,C2為低頻濾波電容器,并與電阻R12組成放電回路,形成延時(shí)環(huán)節(jié),在系統(tǒng)中相當(dāng)于傳感器中的阻尼作用增加。
3 應(yīng)用初探
根據(jù)前文對圖2電路的敘述可知,汽車側(cè)向傾斜角度傳感器的應(yīng)用有2種形式。一是由電路發(fā)出的數(shù)字信號(hào)Uo2,驅(qū)動(dòng)聲光信號(hào)裝置,提醒駕駛員減速;二是由電路發(fā)出的數(shù)字信號(hào)Uo3或模擬信號(hào)Uo1控制執(zhí)行機(jī)構(gòu),使汽車自動(dòng)減速,采用數(shù)字信號(hào)組成定量減速系統(tǒng),減速時(shí)略有些速度忽變,采用模擬信號(hào)組成比例減速系統(tǒng),減速的效果比較平滑,實(shí)現(xiàn)減速的方法有2種,一是減小發(fā)動(dòng)機(jī)油門開度,二是增加制動(dòng)。下文分述。
3.1 減小油門開度的定量減速系統(tǒng)
由傳感器電路發(fā)出的數(shù)字信號(hào),控制執(zhí)行元件(如電磁鐵)組成減小發(fā)動(dòng)機(jī)油門開度的定量減速系統(tǒng),如圖3所示。汽車正常行駛時(shí),油門拉桿由油門踏板控制,電磁鐵中的動(dòng)鐵心隨油門拉桿同步移動(dòng);當(dāng)汽車側(cè)向傾斜(指速度、轉(zhuǎn)彎半徑及路面坡度的綜合值,下同)超過設(shè)定值時(shí),傳感器電路輸出端Uo3發(fā)出信號(hào),經(jīng)延時(shí)環(huán)節(jié)YS(如時(shí)間繼電器,Uo3消失后,YS延時(shí)斷開,若阻尼和電路的延時(shí)足夠,可以不設(shè)),開關(guān)量放大環(huán)節(jié)KF(如繼電器),使電磁鐵DCT得電工作,動(dòng)鐵心迅速移動(dòng)至終止位置,帶動(dòng)油門拉桿,使油門開度突然減小。
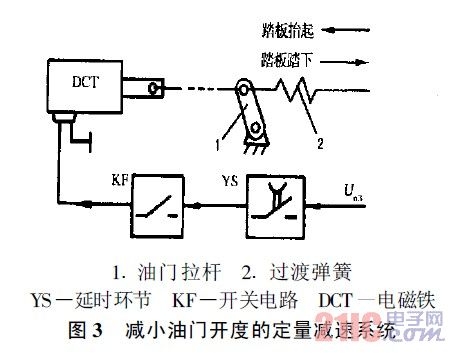
在這一系統(tǒng)中,動(dòng)鐵心移動(dòng)的起始位置不是固定的,終止位置是可以預(yù)先設(shè)定的,所獲得的減速程度有所不同。因此,應(yīng)根據(jù)不同的車型,合理地設(shè)定發(fā)動(dòng)機(jī)減速所要達(dá)到的轉(zhuǎn)速,使減速不至于過于突然。
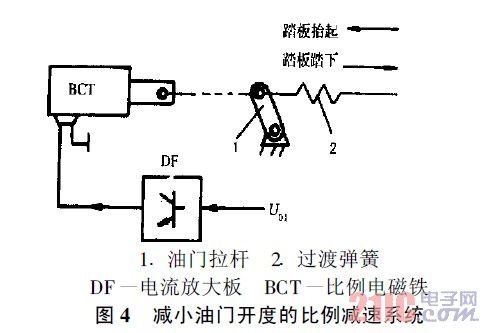
3.2 減小油門開度的比例減速系統(tǒng)
為了避免上述系統(tǒng)中減速的突變性,應(yīng)采用比例減速系統(tǒng),如圖4所示。在比例減速系統(tǒng)中,由傳感器電路Uo1端輸出模擬電壓信號(hào),控制電流放大板DF,按照輸入信號(hào)Uo1的大小,輸出不同的電流值,使比例電磁鐵產(chǎn)生不同的位移,油門開度的減小與Uo1的增大成正比關(guān)系,減速所達(dá)到的最終結(jié)果是傾斜程度所決定的。
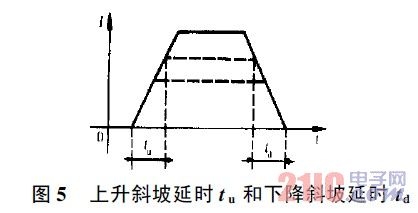
再看一下減速的過程:電流放大板輸出電流的存在或消失要經(jīng)上升斜坡延時(shí)tu和下降斜坡延時(shí)td。上升斜坡延時(shí)是指輸出電流(平均值)從0達(dá)到某一穩(wěn)定值(由Uo1決定)所需要的時(shí)間。下降斜坡延時(shí)是指控制信號(hào)Uo1消失,輸出電流從這一穩(wěn)定值減小至0的時(shí)間,詳見圖5。在電流放大板上,上升斜坡延時(shí)和下降斜坡延時(shí)可以分別調(diào)整,減速的平穩(wěn)性由上升斜坡延時(shí)所決定,上升斜坡延時(shí)越長,輸出電流的上升速率越小,比例電磁鐵移動(dòng)到終止位置(由輸出電流決定)所用的時(shí)間就越長,減速效果越平穩(wěn);異而反之。比例電磁鐵移動(dòng)到某一終止位置后,即完成減速的平穩(wěn)過渡,持續(xù)一段時(shí)間后,傾翻力矩小于設(shè)定值或消失,使Uo1減小或消失。若使Uo1減小,則輸出電流按td所決定的斜率下降,直至為0。假設(shè)Uo1突然消失,輸出電流則經(jīng)過td延時(shí)后為0,從而,實(shí)現(xiàn)了減速后重新加速的平穩(wěn)性。對于上升斜坡延時(shí)和下降斜坡延時(shí),亦應(yīng)根據(jù)不同車型和系統(tǒng)參數(shù)決定。
電流放大板輸出電流的大小通常采用脈寬調(diào)制(簡稱PMW)技術(shù)獲得,由輸入信號(hào)Uo1決定輸出電流波形的占空比,改變電流的平均值,這種直流電流中含有一定成份的顫振分量,可克服比例電磁鐵的調(diào)節(jié)滯環(huán),提高位置控制精度。
3.3 減小油門開度減速系統(tǒng)與原車油門機(jī)構(gòu)的連接
由圖3和圖4可知,減速系統(tǒng)的執(zhí)行元件所產(chǎn)生的位移與原車油門踏板所產(chǎn)生的位移的方向是相反的,當(dāng)執(zhí)行元件使油門開度減小時(shí),勢必會(huì)使油門踏板抬起,并要克服原車油門機(jī)構(gòu)的阻力,若駕駛員的腳踏在踏板上,執(zhí)行元件需產(chǎn)生較大的力量才能完成動(dòng)作,同時(shí),對傳動(dòng)機(jī)構(gòu)中機(jī)械零件的強(qiáng)度、剛度也要提高要求,使得減速系統(tǒng)不夠完善。
為了解決這一問題,在油門踏板與油門拉桿之間增加了一個(gè)過渡彈簧,詳見圖3和圖4。實(shí)際上,油門踏板作用到油門拉桿的力量較小,油門踏板的復(fù)位彈簧并不是直接作用到油門拉桿上,因此,由原來油門踏板直接帶動(dòng)油門拉桿改為增加一個(gè)剛度適中的過渡彈簧(拉簧)帶動(dòng)油門拉桿,正常工作時(shí),并不影響油門踏板對油門拉桿的控制,當(dāng)減速執(zhí)行元件動(dòng)作時(shí),使油門開度減小并將過渡彈簧拉長,假設(shè)駕駛員的腳未抬起,并不會(huì)有太大的踏板向上的感覺或沒有感覺。如果油門踏板的位置保持不變,減速階段結(jié)束后,傾翻力矩已不起作用,傳感器電路停止信號(hào)輸出,減速執(zhí)行元件停止工作,過渡彈簧縮回,帶動(dòng)油門拉桿回到原來位置,可實(shí)現(xiàn)自動(dòng)加速,在定量減速系統(tǒng)中獲得與減速程度一樣的加速,在比例減速系統(tǒng)中可獲得與下降斜坡延時(shí)相對應(yīng)的加速速率,實(shí)現(xiàn)平穩(wěn)加速。
3.4 增加制動(dòng)的減速機(jī)構(gòu)
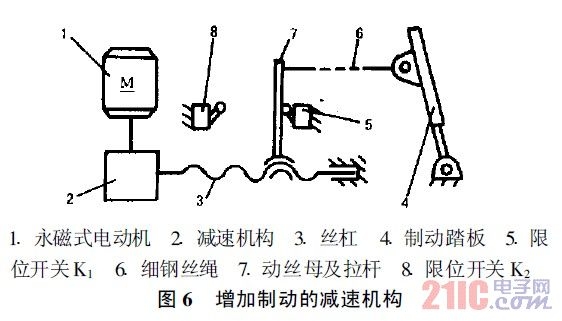
各種汽車的行車制動(dòng)均是通過制動(dòng)踏板完成的,因此,增加制動(dòng)的減速方法的動(dòng)作執(zhí)行元件應(yīng)直接作用于制動(dòng)踏板,而且執(zhí)行元件的動(dòng)作方向與制動(dòng)踏板的踏下方向是一致的,執(zhí)行元件與制動(dòng)踏板的連接可采用機(jī)械結(jié)構(gòu)實(shí)現(xiàn)傳動(dòng)。
根據(jù)踏下制動(dòng)踏板需要的作用力,采用永磁式直流微電機(jī)作為執(zhí)行元件,如圖6所示。電動(dòng)機(jī)輸出的轉(zhuǎn)速經(jīng)減速機(jī)構(gòu)后,帶動(dòng)絲杠旋轉(zhuǎn),使絲杠上的動(dòng)絲母作直線運(yùn)動(dòng),再由動(dòng)絲母上的拉桿經(jīng)一細(xì)鋼絲繩帶動(dòng)制動(dòng)踏板,電動(dòng)機(jī)未轉(zhuǎn)動(dòng)時(shí),拉桿將限位開關(guān)K1壓開,制動(dòng)踏板正常工作。
3.5 增加制動(dòng)的2種控制電路
同上,增加制動(dòng)的減速可采用2種控制方式,即增加制動(dòng)的定量減速系統(tǒng)和增加制動(dòng)的比例減速系統(tǒng),它們的控制電路分別參見圖7和圖8,執(zhí)行元件都是圖6中電動(dòng)機(jī)。所不同的是:在定量減速電路中,電動(dòng)機(jī)直接接入電源而轉(zhuǎn)動(dòng);在比例減速電路中,電動(dòng)機(jī)由電流放大板驅(qū)動(dòng),采用脈寬調(diào)制方法使電流放大板按汽車傾斜的大小,在某一時(shí)間內(nèi),達(dá)到不同的輸出電流最大值,電動(dòng)機(jī)逐漸加速到所對應(yīng)的最高轉(zhuǎn)速,所獲得的制動(dòng)效果比較平滑。具體過程分述如下。
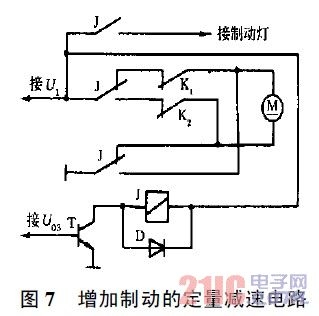
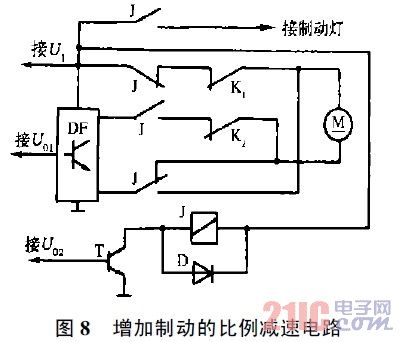
當(dāng)拉桿處于圖6中所示位置時(shí),限位開關(guān)K1被壓開(K1的狀態(tài)與圖7和圖8中的狀態(tài)相反),使電動(dòng)機(jī)處于待命狀態(tài)。當(dāng)圖2中的輸出端Uo3有高電平信號(hào)輸出時(shí),圖7中的三極管T導(dǎo)通,繼電器J得電,觸點(diǎn)轉(zhuǎn)換,使電動(dòng)機(jī)經(jīng)限位開關(guān)K2得到下正上負(fù)的電源而開始轉(zhuǎn)動(dòng),使拉桿離開限位開關(guān)K1,帶動(dòng)制動(dòng)踏板向下,產(chǎn)生制動(dòng),經(jīng)過一段時(shí)間后,Uo3無高電平輸出,繼電器J返回,使電動(dòng)機(jī)經(jīng)限位開關(guān)K1得到上正下負(fù)的電源而開始反轉(zhuǎn)(在較短的時(shí)間內(nèi),電動(dòng)機(jī)處于反接制動(dòng)狀態(tài)下,對小容量的直流電動(dòng)機(jī),在使用上不會(huì)造成影響。也可增加延時(shí)后,使電動(dòng)機(jī)反轉(zhuǎn),本文略)。
當(dāng)拉桿返回到圖6所示終止位置時(shí),K1斷開,電動(dòng)機(jī)停轉(zhuǎn),為下次制動(dòng)作準(zhǔn)備。在圖8中,三極管T的基極接于圖2中的輸出端Uo2,Uo2輸出高電平時(shí)所反映的傾翻力小于Uo3,當(dāng)Uo2輸出高電平時(shí),三極管T導(dǎo)通,繼電器J得電,觸點(diǎn)轉(zhuǎn)換;同時(shí),Uo1輸出的模擬量輸入到電流放大板DF上,使電動(dòng)機(jī)經(jīng)限位開關(guān)K2得到下正上負(fù)的脈動(dòng)直流電源(平均值),開始加速轉(zhuǎn)動(dòng),限位開關(guān)K1由斷開狀態(tài)轉(zhuǎn)為閉合(圖6所示)狀態(tài),加速達(dá)到的最高轉(zhuǎn)速由Uo1當(dāng)時(shí)的大小所決定,而加速轉(zhuǎn)動(dòng)時(shí)間由電流放大板的上升斜坡延時(shí)tu決定(忽略電動(dòng)機(jī)的起動(dòng)慣性時(shí)間),實(shí)現(xiàn)平滑制動(dòng)。隨著制動(dòng)的產(chǎn)生,Uo1下降,使制動(dòng)力減小,直到Uo2的高電平信號(hào)消失,傾翻力小于設(shè)定值,繼電器返回,使電動(dòng)機(jī)經(jīng)限位開關(guān)K1得到上正下負(fù)的電源而迅速反轉(zhuǎn)。當(dāng)拉桿返回到圖6所示終止位置時(shí),K1斷開,電動(dòng)機(jī)停轉(zhuǎn),為下次制動(dòng)作準(zhǔn)備。圖6、圖7和圖8中的限位開關(guān)K2是制動(dòng)的保護(hù)開關(guān),以防止電路失常(如元件短路、搭鐵等),使電動(dòng)機(jī)一直轉(zhuǎn)動(dòng),制動(dòng)無休止地增加,當(dāng)拉桿使K2斷開時(shí),電動(dòng)機(jī)將失去電源而停轉(zhuǎn),在正常制動(dòng)減速過程中,不會(huì)出現(xiàn)K2斷開情況,假設(shè)K2已斷開,而當(dāng)減速結(jié)束后,繼電器J將返回,電動(dòng)機(jī)亦將迅速返回待命位置將K1斷開。在圖7和圖8中,D為繼電器J的續(xù)流二極管,繼電器J觸點(diǎn)閉合時(shí),接通制動(dòng)燈,發(fā)出制動(dòng)信號(hào)。
3.6 兩種減速方法的應(yīng)用
就汽車的行駛工況而言,通常是這樣:上坡時(shí),發(fā)動(dòng)機(jī)油門加大,車速下降,坡度很陡時(shí),發(fā)動(dòng)機(jī)轉(zhuǎn)速會(huì)達(dá)到甚至超過額定轉(zhuǎn)速,車速還要下降;下坡時(shí),發(fā)動(dòng)機(jī)怠速,車速并不會(huì)太低;水平路面時(shí),有時(shí)加速行駛,發(fā)動(dòng)機(jī)轉(zhuǎn)速較高,有時(shí)滑行,發(fā)動(dòng)機(jī)怠速。從降低車速、防止傾翻的角度來講,增加制動(dòng)減速是比減小發(fā)動(dòng)機(jī)油門開度更為直接的方法,但當(dāng)發(fā)動(dòng)機(jī)的轉(zhuǎn)速很高時(shí)(如上坡),將造成發(fā)動(dòng)機(jī)堵轉(zhuǎn),只采用減小發(fā)動(dòng)機(jī)油門開度有時(shí)又會(huì)起不到減速效果(如下坡)。因此,汽車側(cè)向傾斜角度傳感器的應(yīng)用既要滿足減速要求,又不能造成發(fā)動(dòng)機(jī)堵轉(zhuǎn)。具體反映在上坡減速時(shí)。
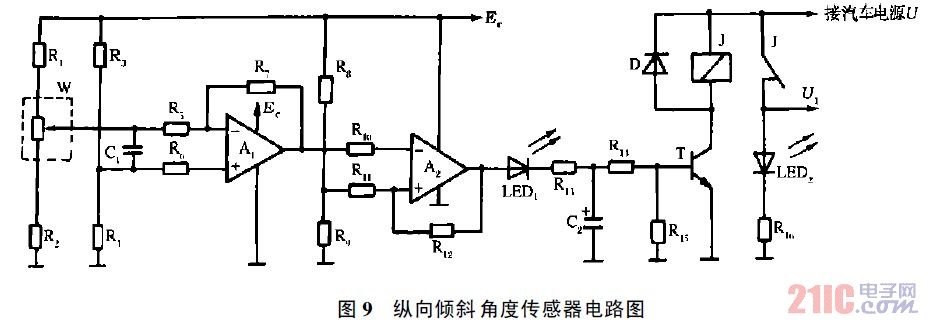
為了解決這一實(shí)際問題,再用一只角度傳感器與車輛縱向布置,其電路如圖9所示。當(dāng)上坡坡度達(dá)到所規(guī)定的數(shù)值(如最大爬坡度)時(shí),運(yùn)放A2輸出端Uo4輸出高電平,繼電器J得電,常閉觸點(diǎn)斷開,切斷了增加制動(dòng)減速電路(圖7、圖8)的電源U1,使其不能工作,因?yàn)樵谶@種工況下,只要發(fā)動(dòng)機(jī)降低轉(zhuǎn)速,就會(huì)得到很好的減速效果,又避免了發(fā)動(dòng)機(jī)堵轉(zhuǎn)。而在其余工況下(爬坡度小于規(guī)定值時(shí)),繼電器J不吸合,減小發(fā)動(dòng)機(jī)油門開度減速系統(tǒng)和增加制動(dòng)減速系統(tǒng)同時(shí)起作用,確保汽車獲得可靠的減速。在圖9電路圖中,發(fā)光二極管LED2作為增加制動(dòng)的減速系統(tǒng)工作電源指示。
4 結(jié)語
關(guān)于本文中的幾個(gè)主要電路參數(shù)歸納敘述如下,(側(cè)向傾翻力矩模擬量Uo1;)側(cè)向傾翻力矩報(bào)警數(shù)字量Uo2側(cè)向傾翻力矩減速數(shù)字量Uo3;+爬坡度數(shù)字量Uo4;,電流放大板的上升斜坡延時(shí)tu和下降斜坡延時(shí)td角度傳感器的阻尼時(shí)間及其電路延時(shí)。應(yīng)根據(jù)汽車的重心高度、輪距、質(zhì)量、速度、轉(zhuǎn)彎半徑、路面坡度及顛簸振動(dòng)等因素綜合決定,達(dá)到合理配合關(guān)系,從根本上避免汽車行駛中側(cè)向傾翻事故的發(fā)生。