
1、引 言
鋼水的真空處理應用于鋼水的脫氫、脫氮、去氧(輕處理)和脫硫,同時具有合金微調(diào)和溫度調(diào)整的功能。攀鋼生產(chǎn)特殊鋼,如軌道鋼、低合金結(jié)構(gòu)鋼、齒輪鋼、氧氣瓶鋼等都需要經(jīng)過真空處理,是方坯連鑄生產(chǎn)的重要環(huán)節(jié)。頂槍應用于真空非處理狀態(tài)下,對真空室進行保溫,減少溫降,祛除真空室內(nèi)壁表面結(jié)瘤。根據(jù)煉鋼廠對真空系統(tǒng)的生產(chǎn)要求,控制系統(tǒng)要具有高可靠性、易操作性、維修方便、控制功能全面的特點,真空控制系統(tǒng)的可編程控制器采用SEIMENS公司的SIMATIC S7-400 PLC。SIMATIC S7-400 PLC是具有中高檔性能的PLC,具有模塊化和用戶易于掌握的特點,并具有高速的指令處理、人機界面、CPU的智能化診斷、具有網(wǎng)絡(luò)通信、軟件編程語言豐富的特點。
2、自動化級控制系統(tǒng)
根據(jù)真空的工藝設(shè)備情況,真空控制系統(tǒng)設(shè)計采用SIEMENS公司的SIMATIC PCS7過程控制系統(tǒng),系統(tǒng)主要由一套S7 400 PLC、兩臺監(jiān)控站和二級計算機系統(tǒng)構(gòu)成。
RH控制系統(tǒng)采用兩級控制系統(tǒng)組成,一級基礎(chǔ)自動化系統(tǒng)和二級計算機控制系統(tǒng),在一級基礎(chǔ)自動化系統(tǒng)中完成其邏輯控制和控制回路的調(diào)節(jié)控制,二級計算機系統(tǒng)從基礎(chǔ)自動化系統(tǒng)采取過程生產(chǎn)數(shù)據(jù),根據(jù)生產(chǎn)計劃和來鋼情況進行模型運算,優(yōu)化出生產(chǎn)參數(shù)下送到基礎(chǔ)自動化系統(tǒng)執(zhí)行操作。RH基礎(chǔ)自動化系統(tǒng)采用西門子公司的S7 400系列的PLC控制器組成過程控制系統(tǒng),網(wǎng)絡(luò)系統(tǒng)采用西門子公司的工業(yè)以太網(wǎng)來連接LF系統(tǒng)、合金下料系統(tǒng)、中控室的操作站、報表打印機和RH的二級計算機等設(shè)備。過程控制系統(tǒng)采用西門子公司的S7 400系列組成PLC控制系統(tǒng),操作臺采用ET200M利用PROFIBUS-DP網(wǎng)絡(luò)接入PLC主控器以減少電纜布線。機電一體設(shè)備采用RS232協(xié)議與PLC的主控器通訊。操作站與PLC系統(tǒng)之間采用工業(yè)以太網(wǎng)協(xié)議通訊,一級操作站和二級計算機采用西門子OPC協(xié)議來完成數(shù)據(jù)交換。為了對控制設(shè)備的精確定位,其傳動系統(tǒng)采用VVVF技術(shù)來進行調(diào)速控制。
3、頂槍加熱過程描述研究
頂槍在非處理期間由停放位開始下降,當下降到預設(shè)加熱高度時,加熱煤氣和氧氣閥打開,煤氣點火燃燒,調(diào)節(jié)煤氣和氧氣流量到給定值對真空室進行加熱或除瘤。

圖1 頂槍加熱過程
位置和加熱控制以及輔助控制的核心設(shè)備是PLC,軟件是RH PLC使用的軟件,控制程序是用STEP 7編程語言編寫的,使用梯形圖、功能框圖、語句表語言。程序編寫使用了模塊化編寫方式。
3.1 PLC對操作方式的實現(xiàn)
(1)事故操作方式(氣動馬達):在事故狀態(tài)下,將氣動馬達耦合手柄打到氣動馬達位置,用N2升降頂槍。電動操作和氣動馬達操作,通過一個耦合器進行切換,有一個行程開關(guān)檢測頂槍處于氣動或電動狀態(tài)。(2)就地操作方式(現(xiàn)場操作箱):在現(xiàn)場操作箱上選擇“就地”,按“上升”按鈕(自復位按鈕),槍以給定速度上升,當槍運行到緊急上限時,自動停止;按“下降”按鈕(自復位按鈕),槍以給定速度下降,當槍運行到緊急下限時,自動停止。操作完畢,將選擇開關(guān)置于“遠控”(現(xiàn)場操作臺)方式。當現(xiàn)場操作箱選擇“就地”操作時,現(xiàn)場操作臺、PLC和LEVEL 2均不能對頂槍進行操作。(3)本地手動操作方式(現(xiàn)場操作臺):在現(xiàn)場操作臺上將鑰匙開關(guān)置于“本地”(LOCAL)上升過程:首先將膨脹密封圈松開,當槍離預定位置較遠時,按“高速上升”按鈕(自復位按鈕),槍高速上升,當槍快接近預定位置時,改按“低速上升”按鈕,槍低速上升,到預定位置松開按鈕,槍停止運行。鎖緊膨脹密封圈。上升過程中,當槍到達上極限時,槍自動停止運行。下降過程:首先將膨脹密封圈松開,當槍離預定位置較遠時,按“高速下降”按鈕(自復位按鈕),槍高速下降,當槍快接近預定位置時,改按“低速下降”按鈕,槍低速下降,到預定位置松開按鈕,槍停止運行。鎖緊膨脹密封圈。下降過程中,當槍到達下極限時,槍自動停止運行。在現(xiàn)場操作臺上設(shè)有1個BCD碼數(shù)字顯示表,顯示頂槍的槍位(距真空室底部的距離),設(shè)有“本地/遠程”、“高速上升”、“低速上升”、“高速下降”、“低速下降”及位置極限等指示燈。操作完畢,應將現(xiàn)場操作臺上的鑰匙開關(guān)置于“遠程”(REMOTE)方式。操作臺設(shè)有PLC的遠程I/O站,使用PROFIBUS-DP網(wǎng)絡(luò)與主站相連,傳輸速率是12M/S。使用PROFIBUS-DP協(xié)議。(4)遠程操作方式(OSM操作站操作):只有當實際槍位≤停放位(Parking Position)時,可以進行遠程操作操作員直接在操作站上輸入槍位設(shè)定值,在PLC中將實際槍位與設(shè)定槍位進行比較,控制頂槍的升降;當槍位差值>100mm時,頂槍高速運行(上升/下降),當槍位差值<100mm時,頂槍低速運行(上升/下降);當槍位差值<10mm時,頂槍停止運行,保證位置控制精度在+/-10mm。遠程操作時操作站通過工業(yè)以太網(wǎng)與PLC相連,傳輸速率是100M/s。使用TCP/IP協(xié)議。
3.2 頂槍位置控制
頂槍位置控制是按位置偏差控制的閉環(huán)控制,在頂槍自動方式運行下,操作人員根據(jù)真空室的溫度情況對頂槍要到達的加熱位在操作站上進行槍位值的預設(shè)定,數(shù)據(jù)由以太網(wǎng)傳送到CP模板,CP模板將數(shù)據(jù)傳送到CPU的存儲區(qū),STEP7軟件編制的應用程序執(zhí)行相應的控制程序,通過編碼器反饋的值進行頂槍槍位的偏差控制。頂槍的槍位通過絕對編碼器進行測量,編碼器產(chǎn)生的脈沖信號由FM451計數(shù)模板讀入,CPU通過功能塊將FM451計數(shù)模板的信號讀出到程序中,將計數(shù)值轉(zhuǎn)換成對應的高度值,與預設(shè)的高度值相減得到偏差值,根據(jù)偏差值來控制頂槍的快慢速及停止。在程序中使用數(shù)值運算、比較運算就可得到控制信號,由信號模板輸出到變頻器去控制電機,從而實現(xiàn)對頂槍的升降控制。頂槍在下極限對槍位進行初始校正。頂槍的行程為0~6米;OMS和現(xiàn)場現(xiàn)場操作臺上顯示的槍位是:頂槍槍頭距離真空室底部的距離。100mm以上是快速,10~100mm之間是慢速,10mm以下PLC發(fā)出停止指令。軟件程序控制設(shè)計框圖如下。
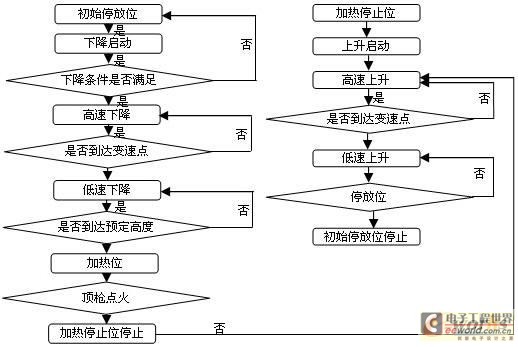
圖2 軟件程序控制設(shè)計框圖
3.3 燃燒加熱控制
燃燒加熱控制是頂槍在非處理期間在大氣加熱下對真空室進行加熱或除瘤化渣。對真空室進行保溫,以及除去真空室的殘渣。加熱啟動時,當頂槍到達預定加熱高度時,PLC控制燃燒控制單元打開切斷閥,燃氣燃燒,PLC控制調(diào)節(jié)閥調(diào)節(jié)流量,達到給定流量。火焰檢測器檢測頂槍火焰的燃燒情況,不滿足燃燒強度則自動提槍。給定流量在操作站設(shè)定。
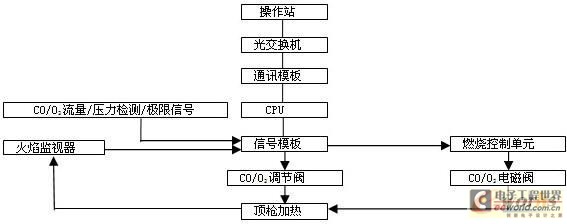
圖3 信號傳遞結(jié)構(gòu)簡圖
頂槍中通過的氣體有N2、O2和CO。燃燒加熱控制是控制CO和O2的比例和流量,流量調(diào)節(jié)是個簡單閉環(huán)控制系統(tǒng),控制采用PID算法控制,數(shù)學模型如下:
e=PV-SV (1)
![]() (2)
(2)
PV:流量實際值;SP:流量設(shè)定值;e:流量差;OUT:控制器輸出;δ:比例度;Ti積分時間;Td:微分時間。
在程序中,直接調(diào)用PID功能塊就能很好的實現(xiàn)數(shù)據(jù)運算。這里使用的是FB41連續(xù)控制PID功能塊,能非常方便的對其進行參數(shù)組態(tài)。在適當調(diào)整δ,Ti,Td三個參數(shù)值后,就能獲得較好的控制質(zhì)量。加熱時由流量計檢測流量,控制器得出調(diào)節(jié)閥的開度值輸出控制調(diào)節(jié)閥的開度,來控制燃氣流量達到預定值。也可用手動方式控制調(diào)節(jié)閥的開度,來調(diào)節(jié)流量,此時是個開環(huán)控制。處理開始時和結(jié)束后,需要用N2對頂槍進行吹掃,清掃管道中的煤氣,氣體通斷由PLC通過電磁閥進行控制。處理完畢,要對CO、O2管道進行壓力測試,分別由電接點壓力表和切斷閥來完成,保證氣體管道無泄漏。

圖4 軟件程序設(shè)計框圖
3.4 頂槍冷卻控制
頂槍用MCW進行冷卻,冷卻水進出口流量用電磁流量計測量。遠程手動打開進水閥,當進水流量>98t/h或進出水流量差>900L/h自動關(guān)閉進水閥。
3.5 膨脹密封圈控制
頂槍升降時,膨脹密封圈應松開,頂槍停止時,膨脹密封圈應充氣密封,防止真空室內(nèi)高溫燒壞密封圈。膨脹密封圈松開時,同時對槍孔用N2吹掃,防止密封圈被燒。
4、結(jié) 語
過去在工廠的實際運用中,有些地方發(fā)生了燒壞模板的事故,導致了生產(chǎn)中斷的事件。本文作者創(chuàng)新點:系統(tǒng)有較強的數(shù)據(jù)處理實現(xiàn)數(shù)據(jù)報表的自動生成、數(shù)據(jù)庫的訪問等多種功能。頂槍系統(tǒng)的可編程控制器控制以微處理器為基礎(chǔ),綜合計算機技術(shù)、自動控制技術(shù)和通訊技術(shù),具有可靠性、易操作性、靈活性、機電一體化和較強的適應惡劣環(huán)境的特點。目前實際運用當中PLC系統(tǒng)的供電系統(tǒng)非常可靠,人機界面友好,易操作,使用維護方便。PLC滿足了頂槍各項控制功能的需要,體現(xiàn)了其強大和可靠的控制功能,在攀鋼獲得廣泛的應用,為企業(yè)每年節(jié)約成本近百萬元。