
0 引 言
隨著電子計(jì)算機(jī)等科學(xué)技術(shù)的發(fā)展,醫(yī)療設(shè)備的現(xiàn)代化,、智能化研究越來越受到人們的關(guān)注,,大量的科學(xué)家及工程技術(shù)人員都積極地投入到這一場醫(yī)療設(shè)備的革命中,其中,,對各種類型射線底片觀片設(shè)備的研究也是醫(yī)療設(shè)備開發(fā)的重點(diǎn),。由于傳統(tǒng)的觀片設(shè)備亮度低、均勻性差,、容易引起視疲勞等缺點(diǎn),,已經(jīng)不能滿足現(xiàn)代化醫(yī)學(xué)診斷的要求。利用CCFL開發(fā)的觀片儀具有結(jié)構(gòu)簡單,、燈管表面溫升小,、燈管表面亮度高、使用壽命長,、顯色性好,、發(fā)光均勻等優(yōu)點(diǎn)。
本文介紹一種以C8051F350單片機(jī)作為主控芯片的全自動CCFL觀片儀亮度調(diào)節(jié)系統(tǒng),,當(dāng)環(huán)境光強(qiáng)發(fā)生變化后,,該系統(tǒng)能夠使觀片儀的背景照明光強(qiáng)與環(huán)境光強(qiáng)比值保持最佳,觀測者看到的射線底片內(nèi)容最為清晰而且不容易產(chǎn)生視覺疲勞,。觀片儀亮度與環(huán)境光強(qiáng)的比值最初可由觀測者根據(jù)自己的具體情況設(shè)定,。該系統(tǒng)還可以實(shí)現(xiàn)觀片儀的自動開關(guān),插入射線底片后自動點(diǎn)亮觀片儀,,當(dāng)系統(tǒng)閑置時,,觀片儀會自動關(guān)閉進(jìn)入省電模式,延長了冷陰極燈管的使用壽命,。
1 CCFL觀片儀調(diào)光原理
基于CCFL的觀片儀是一種由冷陰極高頻光源通過液晶背光技術(shù)(LCD)產(chǎn)生大面積的高亮度,、均勻性好、噪聲低的環(huán)保節(jié)能設(shè)備,。采用CCFL背光照明技術(shù),,將線光源轉(zhuǎn)變?yōu)榱炼染鶆虻拿婀庠础CFL發(fā)光強(qiáng)度由DC/AC逆變器控制,,通過改變逆變器控制電壓從而改變CCFL的發(fā)光強(qiáng)度,。為實(shí)現(xiàn)環(huán)境光強(qiáng)變化后觀片儀能夠自動調(diào)節(jié)到最佳觀測亮度,,利用光電傳感器動態(tài)采集環(huán)境光強(qiáng),由C8051F350對信號進(jìn)行A/D化,,根據(jù)一定的算法處理后輸出CCFL控制的電壓,,達(dá)到自動調(diào)光的目的。
2 硬件設(shè)計(jì)
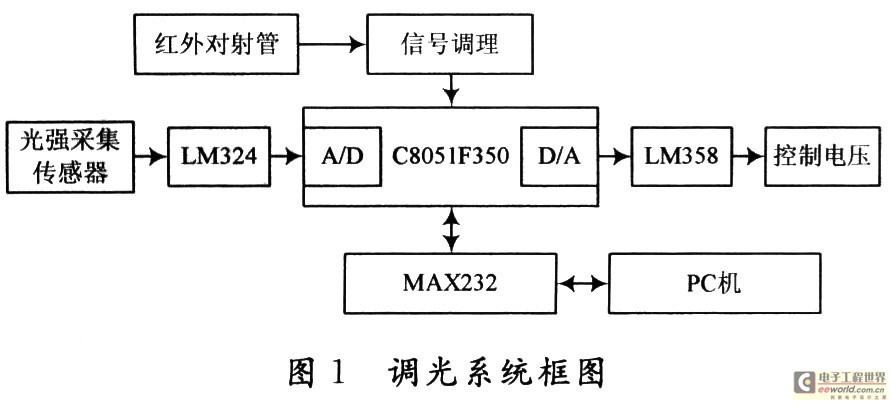
觀片儀控制系統(tǒng)主要由自動開關(guān),、調(diào)光控制,、通信接口三部分構(gòu)成,系統(tǒng)框圖如圖1所示,。系統(tǒng)采用C8051F350為主控芯片,,紅外對射管實(shí)現(xiàn)觀片儀的自動開關(guān)。單片機(jī)通過實(shí)時采集環(huán)境光強(qiáng)和背景照明光強(qiáng),,實(shí)現(xiàn)觀片儀亮度的動態(tài)調(diào)節(jié),。通信部分則采用RS 232接口方式,主要完成系統(tǒng)參數(shù)的設(shè)置以及固件程序的在系統(tǒng)升級(ISP),。
2.1 紅外對射管
觀片儀自動開關(guān)由紅外對射管傳感器實(shí)現(xiàn),。當(dāng)紅外對射管之間插入射線底片后,紅外接收管則輸出信號,,程序檢測到該信號從而打開CCFL,;當(dāng)系統(tǒng)閑置時,觀片儀則自動熄滅,。
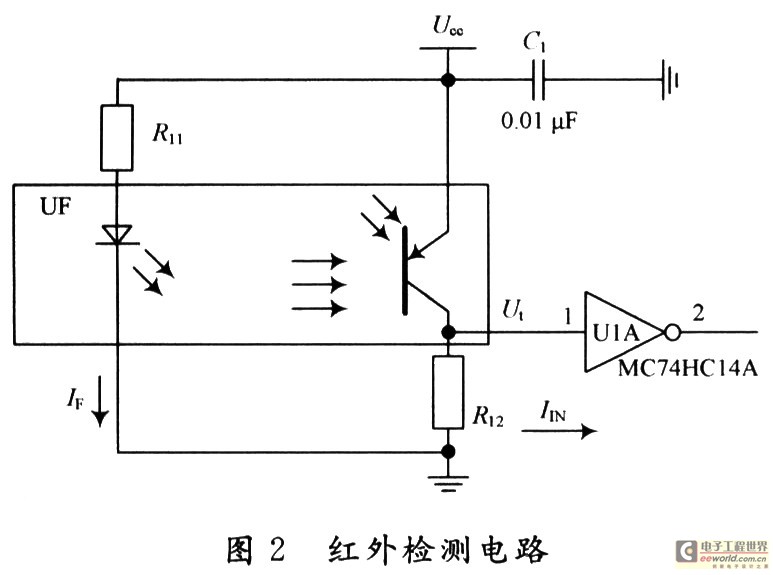
紅外對射管選擇霍尼韋爾公司的SEP8505-002,,其工作波長為935nm,材料為GaAs(砷化鎵),,發(fā)光功率為7.8mW/cm(流明),,光譜寬度為80 nm,正向壓降為1.5V,,輸出電流為20 mA,。與其配對的紅外接收管為SDP8405—002,功率為70 mW,,工作方式為三極管射極跟隨輸出方式,。光電接收管的輸出飽和電流為0.4 mA,CE極的飽和電壓為0.4V,,紅外檢測電路見圖2,。
2.2 光強(qiáng)信號采集與調(diào)理
光電傳感器在0~50 000 lux范圍的照度下產(chǎn)生O~412 mV的電壓,而單片機(jī)的A/D輸入電壓范圍為O~3.3V,,因此系統(tǒng)采用LM324對信號進(jìn)行放大調(diào)理,,其放大電路見圖3。為實(shí)現(xiàn)將0~412 mV的電壓放大到O~3.3V的范圍,設(shè)計(jì)放大倍數(shù)為8,,放大倍數(shù)由式(1)確定:
Av=1+R24/R23 (1)
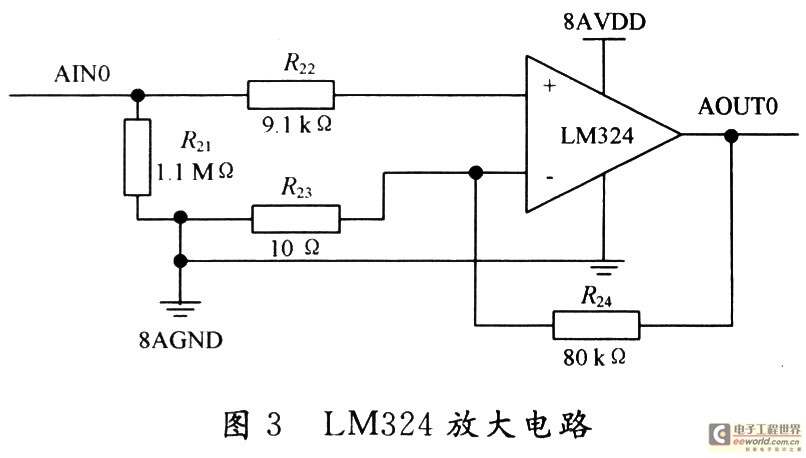
確定R23選擇10 kΩ電阻,,R24選擇80 kΩ電阻,。LM324由四個獨(dú)立的運(yùn)放組成,,為了提高采集光強(qiáng)的準(zhǔn)確度,分別用兩個光電傳感采集CCFL光強(qiáng),,兩個采集環(huán)境光強(qiáng),,對這四路分別放大后直接輸入到C8051F350的高精度AD轉(zhuǎn)換通道0~3進(jìn)行A/D化處理。
2.3 主控部分
主控芯片采用了美國Silicon Laboratories公司的混合信號ISP FLAsH微控制器C8051F350,,其內(nèi)部有一個全差分24位高精度Sigma-Delta模/數(shù)轉(zhuǎn)換器(ADC),,該ADC具有片內(nèi)校準(zhǔn)功能,保證了觀片儀亮度的高精度動態(tài)調(diào)節(jié),。為實(shí)現(xiàn)其系統(tǒng)的穩(wěn)定性和可靠性,,采用模擬和數(shù)字分開供電,減少了數(shù)字信號和模擬信號之間的干擾,。C8051F350主要控制觀片儀的自動開關(guān),、光信號的A/D轉(zhuǎn)換與處理、控制信號的輸出,、RS 232串口通信,。
編碼器技術(shù)是風(fēng)能獲取的關(guān)鍵
旋轉(zhuǎn)編碼器在風(fēng)能產(chǎn)業(yè)中起著非常重要的作用,它提供了使用當(dāng)前渦輪機(jī)中非常動態(tài)靈活的控制系統(tǒng)所必不可少的高分辨率反饋,。選擇合適的編碼器將能夠極大地增強(qiáng)系統(tǒng)以最佳功率輸出運(yùn)行的能力,,并使投資的回報最大化。
美國Lawrence Berkeley國家實(shí)驗(yàn)室的數(shù)據(jù)表明,,在2008年,,美國風(fēng)能產(chǎn)量激增了51%,新增容量達(dá)8545MW,,新增投資超過160億美元,。新建離網(wǎng)型渦輪機(jī)7800臺、并網(wǎng)型渦輪機(jī)1292臺,。每臺渦輪機(jī)的平均產(chǎn)能大約是1.7MW,。風(fēng)能產(chǎn)能比2007年增加了約46%。
風(fēng)力渦輪機(jī)的剖面圖展示了一種常用的控制系統(tǒng),,如圖1所示,。這類系統(tǒng)通常使用5個編碼器,它提供反饋,,以維持發(fā)電機(jī)在不同的風(fēng)力條件和不同的負(fù)載需求下的性能,。
圖1 風(fēng)力渦輪機(jī)控制系統(tǒng)中使用了多達(dá)5個編碼器
● 隨著風(fēng)力條件的變化,葉片距控制系統(tǒng)維持著轉(zhuǎn)子的速度。
● 偏航控制系統(tǒng)(方位)根據(jù)風(fēng)向來控制整個發(fā)電機(jī)的旋轉(zhuǎn),。
● 發(fā)電機(jī)速度是通過跟蹤發(fā)電機(jī)軸的每分鐘轉(zhuǎn)速(rpm)來進(jìn)行監(jiān)控的,。
風(fēng)力渦輪機(jī)中常用的3種類型的旋轉(zhuǎn)編碼器是增量型、絕對型和混合型,,其中每種技術(shù)都各有利弊,。下面的概述將幫助引導(dǎo)設(shè)計(jì)工程師找出對應(yīng)系統(tǒng)各個部分的最佳編碼器。
增量型編碼器
增量型旋轉(zhuǎn)編碼器是單匝設(shè)備,,在軸的每一周旋轉(zhuǎn)中都產(chǎn)生固定數(shù)量的脈沖,。這種反饋類型的一個優(yōu)點(diǎn)是它能夠?qū)崟r響應(yīng)軸轉(zhuǎn)速的變化,因此非常適用于跟蹤渦輪發(fā)電機(jī)的每分鐘轉(zhuǎn)速(rpm),。此外,,它還具有應(yīng)用范圍廣以及成本比其他類型更低的優(yōu)點(diǎn)。
增量型編碼器可以用于控制葉片距和偏航角的變化,,但是它無法保存位置數(shù)據(jù),。驗(yàn)證和跟蹤葉片及發(fā)動機(jī)的相對位置將需要在控制系統(tǒng)設(shè)計(jì)中增加來自接近開關(guān)或霍爾效應(yīng)傳感器的額外輸入當(dāng)作參考點(diǎn)。
絕對型編碼器
絕對型旋轉(zhuǎn)編碼器有單匝或多匝型,,它是通過讀取光具盤或某種類型的磁力接收系統(tǒng)上的多個記錄來分辨軸向位置的,。這種類型具有保存位置數(shù)據(jù)的能力,哪怕是控制系統(tǒng)斷電也可以,。多匝型包括用于記錄軸轉(zhuǎn)動次數(shù)(精確到千位)的齒輪級,,不再需要使用電池來保存位置信息。位置數(shù)據(jù)是直接讀取的,,而不是以增量方式讀取,,并且在上電后很快即可使用。
絕對型編碼器通過SSI,、Profibus,、DeviceNet或CANopen串行接口來提供位置反饋數(shù)據(jù)。這些接口可能會限制反饋位置數(shù)據(jù)的傳送速率,,所以它不是實(shí)時的,。因此,絕對型編碼器不能夠用于跟蹤發(fā)電機(jī)速率,。不過,,這并不影響它被用于跟蹤變化較緩慢的發(fā)電機(jī)位置,也不影響被用于某些葉片距控制系統(tǒng)中,。
混合型旋轉(zhuǎn)編碼器
混合型編碼器有單匝或多匝型,,它本身提供了增量型和絕對型編碼器技術(shù)的優(yōu)點(diǎn)。這為用戶提供了替換2個編碼器的潛在可能性,,可降低成本和占用空間,。這種類型的編碼器提供脈沖或正弦/余弦波形,非常適用于葉片距控制系統(tǒng),因?yàn)樗峁┝宿D(zhuǎn)速高達(dá)6000rpm的電機(jī)所需要的實(shí)時反饋,,同時還能夠在系統(tǒng)斷電時保存絕對的單匝或多匝位置數(shù)據(jù),。目前,有許多電機(jī)驅(qū)動已經(jīng)增加了標(biāo)準(zhǔn)輸入,,以便接收正弦/余弦波形反饋,。有時,客戶可以獲得更高的電機(jī)效率,。
縱覽
并不是所有的旋轉(zhuǎn)編碼器都同等重要,,當(dāng)今的增量型,、絕對型和混合型編碼器設(shè)計(jì)中所用到的光學(xué)和磁學(xué)技術(shù)在不斷改進(jìn)以增加分辨率,,溫度范圍和耐用性。光學(xué)編碼器設(shè)計(jì)利用Opto-ASIC等新技術(shù)進(jìn)行了改進(jìn),,第二或第三代設(shè)計(jì)提供了更高的分辨能力,,更快的工作轉(zhuǎn)速,并改善了工作溫度范圍,。此外,,Opto-ASIC通過電場可調(diào)分辨率、輸出驅(qū)動類型(TTL或HTL)和標(biāo)記物寬度,,使得用戶能夠?qū)幋a器進(jìn)行編程,。
金屬光具盤是另一個經(jīng)過改進(jìn)的重要編碼器部件,它使得編碼器能夠工作在惡劣的環(huán)境中,,并提供了更高的分辨率,。過去,增量型和絕對型編碼器需要使用玻璃光具盤來實(shí)現(xiàn)更高的分辨率,,但它降低了對震動和振動的抵抗能力,。新出現(xiàn)的金屬光具盤將分辨率提升了6倍,無須使用電子乘法器,,并具有更好的震動和振動性能,。
許多新型編碼器設(shè)計(jì)都減小了外殼的尺寸。但是,,如果設(shè)計(jì)和建造不能達(dá)到高質(zhì)量標(biāo)準(zhǔn),,那么所有這些技術(shù)改進(jìn)和體積縮減都沒什么價值。例如,,軸承的質(zhì)量,,裝配方式以及軸承之間的距離都將極大影響編碼器的壽命。