
引言
圖像是用各種觀測系統(tǒng)以不同形式和手段觀測客觀世界而獲得的,可以直接或間接作用于人眼并進而產(chǎn)生視知覺的實體,是人類感知世界的視覺基礎(chǔ),是人類獲取信息、表達信息和傳遞信息的重要手段。研究表明,人類獲取的視覺圖像信息在人類接受的信息中的比重達到75%,“百聞不如一見”便是非常形象的例子之一。在高度信息化條件下的今天,數(shù)字圖像越來越得到普及和應(yīng)用。
然而,人們在獲取和傳輸數(shù)字圖像的同時,難免于圖像數(shù)據(jù)被外界噪聲所污染,妨礙了人們對圖像信息的理解。由此,圖像去噪技術(shù)應(yīng)運而生。圖像去噪,即在盡可能地不損失原圖像細節(jié)的前提下,去除圖像中無關(guān)的噪點。現(xiàn)有的圖像去噪方法[11很多,如:
1 均值濾渡器
均值濾波器是一種典型的線性去噪方法,因為其運算簡單快速,同時又能夠較為有效地去除高斯噪聲。因而適用面較廣。
許多濾除噪聲方法都是在此基礎(chǔ)上發(fā)展而來的。其缺點是嚴重破壞了圖像的邊緣,模糊了圖像。
2 低通濾波器
低通濾波器,信號或圖像的能量大部分集中在幅度譜的低頻和中頻段是很常見的;而在較高頻段,感興趣的信息常被噪聲所淹沒。因此。一個能降低高頻成分幅度的濾波器就能減弱噪聲的看的見的影響。這是一種頻域處理法。在分析圖像信號的頻率特性時,一幅圖像的邊緣、跳躍部分以及顆粒噪聲代表圖像信號的高頻分量,而大面積的背景區(qū)則代表低頻分量。用濾渡的方法濾除其高頻部分就能去掉噪聲,使圖像得到平滑。但同時,有用的高頻成分也濾除了。因此這種處理是以犧牲清晰度為代價的。
3 中值濾波器
中值濾波器是一種消除噪聲的非線性處理方法,它是由Tueky在1971年提出的。它的基本原理是把數(shù)字圖像或數(shù)字序列中一點的值用該點的一個鄰近各點值的中值代替。中值定義如下:對一個數(shù)字序列的元素進行排序,如果元素個數(shù)為奇數(shù),則取排序后序列的中間值。如果序列元素個數(shù)為偶數(shù),則取排序后序列的中間兩個值的均值。
把一個點的特定長度或形狀的領(lǐng)域稱作窗口。在一維情況下,中值濾波器是一個含有奇數(shù)個像素的滑動窗口。窗口正中問那個像素的值用窗口內(nèi)各像素值的中值代替。
該濾波器是一種典型的非線性處理方法。它的優(yōu)勢在對圖像中脈沖噪聲消除極為有效,且能夠較好地保護圖像邊緣信息。
弱點是因為涉及大量排序運算,運算速度較慢,對圖像的實時處理有影響。圖像一般要傳化成數(shù)字圖像后才可以使用計算機對其進行各種處理。數(shù)字圖像,是以數(shù)字的形式而存在的。利用MATLAB(矩陣實驗室)進行處理時,我們簡單地理解它為一定大小的數(shù)字矩陣。矩陣中的每個效字代表圖像的一個像索點。由此可以知道,對數(shù)字圖像的處理,實際上就是對一個數(shù)字矩陣的運算處理。
為了研究方便,我們的方法是人工的給原圖像添加噪聲·主要是不同強度的正態(tài)分布隨機噪聲和脈沖噪聲。在MATLAB中,正態(tài)分布噪聲是由randn函數(shù)實現(xiàn)的,而脈沖噪聲,即平常所說的椒鹽噪聲,是由imnoise(Io,’saIt 8L pepper,i)實現(xiàn)的。其中Io是原圖像矩陣,i取值。至1之間,表示噪聲的強度。
通過研究,發(fā)現(xiàn)一種新的改進的均值濾波器[2]。在考慮如何對圖像的噪聲進行處理時,難以避免的,需要面臨噪聲點的檢測問題。因為一張含噪圖像中,只有一部分的像素受到了噪聲的污染,而其余的像素仍保持原值。無條件地對所有的像素點進行濾波,顯然在去除噪點的同時,使原圖像發(fā)生了失真。所以為了更有針對性地處理圖像中的躁點,最好的做法就是先對噪聲進行檢測。然后利用非噪聲點的平均值來代替每個像素的灰度,而不是上面?zhèn)鹘y(tǒng)方法中的盲目運算。其計算公式為:
式中,S為(x,y)點領(lǐng)域中坐標的*,但不包括其本身,M為*內(nèi)坐標點的點數(shù)。下面通過實例來驗證這種方法的優(yōu)越性:
采用尺寸大小為162×120的圖像文件shoes.jpg。使用im-眥d函數(shù)將其載人到MATLAB中,為了簡便。我們先用瑁b29ray函數(shù)將其轉(zhuǎn)換為單維的灰度圖像,灰度范圍[o,255]
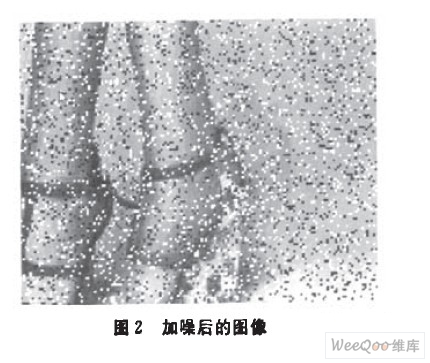
(見圖1)。在原圖基礎(chǔ)上加入噪聲密度為o.2的脈沖噪聲,可以用imnoise函數(shù)加入椒鹽噪聲,也可以用randn加入正態(tài)分布的隨機噪聲,這樣就得到了含噪的圖像。芝麻鹽狀的雪*點隨機地分布在圖像矩陣巾(見圖2)。
一般來說,圖像中像素的灰度值是連續(xù)漸變的。
而如果存在噪點,那么在原圖像素和噪點之間的灰度值會發(fā)生突然的變化。基于此,首先取待檢測點的上、下、左、右四個鄰域大小為3×3,計算各鄰域的平均值,如果四個鄰域的均值都與待檢測點的差的絕對值大于既定的閾值,則判斷該點為噪點,反之,有一個鄰域的均值與待測點的差小于閾值。則判斷該點為正常像素點。其中;闋值是我們根據(jù)圖像的含噪情況人為設(shè)定的一個值,一般在100和200之問。同時。建立與待檢測圖像大小相同的矩陣,稱為噪聲標識矩陣。其中的點與原圖像矩陣中的點一一對應(yīng)。并預(yù)設(shè)該矩陣中的值全為1,如果一像素被判斷為噪聲,則置標識矩陣中相應(yīng)元素為o.這樣,就可以實現(xiàn)前面判斷過程所得出的結(jié)果被后續(xù)的檢測所使用,已經(jīng)被判定為噪聲的像素不再參與領(lǐng)域均值的計算。
這樣,我們就可以用一個循環(huán),來對圖像矩陣中的每個像素逐個進行判斷,方便地檢測到了噪聲點。
接下來,就可以利用中值濾波的方法,去除圖像中的噪點了,將預(yù)先判斷為噪點的圖像矩陣中的點,如(a。b)=(70.S5)的點的值是230,與鄰域點的均值的差大于兩值150。因此翔斷它是一個噪點。這樣,我們就用它鄰域內(nèi)的八個點中有效的點來取均值代入。依次執(zhí)行,挨個計算、代人。這樣就得到了一個新的圖像數(shù)據(jù)矩陣,最后我們用i眥Ilow函數(shù)顯示處理后的圖像(見圖3)。可以看到。效果非常明顯。

4 結(jié)語
去噪后的圖像不僅噪聲強度受到限制,而且圖像細節(jié)得到了最大限度的保持,解決了妨礙人們獲取圖像信息的同胚。在航空航天、通信工程、生物醫(yī)學、軍事公安、文化藝術(shù)等領(lǐng)域都具有一定意義。