
目前,我國(guó)在役長(zhǎng)距離油氣輸送管道總長(zhǎng)兩萬公里左右,腐蝕導(dǎo)致的油氣泄漏事故時(shí)有發(fā)生,造成了經(jīng)濟(jì)損失、能源浪費(fèi)。因此,對(duì)油氣管道進(jìn)行檢測(cè)在國(guó)民經(jīng)濟(jì)中占有極為重要的地位。漏磁檢測(cè)法是國(guó)家863高科技項(xiàng)目“管道檢測(cè)爬行器”采用的主要技術(shù)。其中的關(guān)鍵部件——InSb霍爾傳感器由于半導(dǎo)體材料的固有特性和制造工藝的缺陷,對(duì)溫度敏感,需要采用一定的溫度補(bǔ)償措施[1]。該文針對(duì)已研制成功的檢測(cè)設(shè)備,采用多傳感器數(shù)據(jù)融合方式消除溫度誤差。構(gòu)建了多傳感器融合模型,選用徑向基函數(shù)(Radial Basis Function,RBF)網(wǎng)絡(luò)對(duì)磁敏傳感器和溫度傳感器的輸出進(jìn)行融合,并通過實(shí)驗(yàn)驗(yàn)證了該方法的有效性。檢測(cè)系統(tǒng)的準(zhǔn)確度和穩(wěn)定性有了明顯的提高。
1漏磁檢測(cè)裝置及傳感器溫度特性
1.1漏磁檢測(cè)原理及裝置
漏磁檢測(cè)法是近年來廣泛應(yīng)用于輸油輸氣管道檢測(cè)的有效方法,原理如圖1所示。如果被測(cè)管壁沒有缺陷,磁力線閉合;如果有缺陷,磁力線將穿出管壁而產(chǎn)生漏磁場(chǎng)[2]。磁敏傳感器將漏磁場(chǎng)的大小轉(zhuǎn)化為電壓數(shù)據(jù)輸出,輸出波形的幅度同缺陷的深度、波形的峰峰水平間距同缺陷寬度均是近似的線 性關(guān)系。因此,由漏磁信號(hào)波形可以反演出缺陷的形狀[3]。

已研制的管道檢測(cè)裝置由驅(qū)動(dòng)機(jī)器人、系統(tǒng)控制器、供電部件、漏磁檢測(cè)部件、數(shù)據(jù)預(yù)處理部件和定位裝置6部分組成。檢測(cè)時(shí),系統(tǒng)控制器控制驅(qū)動(dòng)機(jī)器人帶動(dòng)各個(gè)部件在管道中爬行,漏磁檢測(cè)傳感器組獲取管道狀態(tài)信息并將檢測(cè)數(shù)據(jù)送預(yù)處理部件放大、去噪、壓縮并存儲(chǔ),以備離線分析反演。定位裝置用于確定檢測(cè)系統(tǒng)當(dāng)前位置。
1.2InSb溫度特性
漏磁檢測(cè)傳感器組選用了InSb霍爾元件作為敏感元件。霍爾元件與其他常用的磁敏傳感器相比體積小、功耗小、耐震動(dòng)、不怕油污、水汽等的污染或腐蝕,靈敏度高。但是該檢測(cè)裝置工作于溫度、壓力較高,且經(jīng)常變化的環(huán)境下,霍爾傳感器的輸出電壓誤差較大。圖2是不同材料構(gòu)成的霍爾傳感器輸出電壓與溫度變化的關(guān)系曲線[1]。InSb非線性嚴(yán)重。

多傳感器融合實(shí)現(xiàn)誤差補(bǔ)償
多傳感器信息融合是20世紀(jì)70年代興起的一個(gè)新學(xué)科,已廣泛應(yīng)用于目標(biāo)識(shí)別、狀態(tài)估計(jì)、威脅估計(jì)等領(lǐng)域。該技術(shù)將來自多個(gè)傳感器的數(shù)據(jù)進(jìn)行多級(jí)別、多方面、多層次的處理,從而產(chǎn)生新的有意義的信息,這種信息是任何單一傳感器無法獲得的[4]。
2.1補(bǔ)償模型
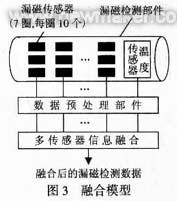
該文嘗試將多傳感器信息融合應(yīng)用于誤差補(bǔ)償中。在檢測(cè)裝置的漏磁傳感器部件中加入一個(gè)溫度傳感器,實(shí)時(shí)記錄工作環(huán)境的溫度。國(guó)內(nèi)輸油輸氣管道管徑普遍較小,設(shè)備已排列7圈,共70個(gè)漏磁傳感器,空間緊張。而且,部件密封,內(nèi)部環(huán)境溫度變化緩慢,因此只加入一個(gè)溫度傳感器。將軸向分布的10排(每排7個(gè))漏磁傳感器分別和溫度傳感器的輸出進(jìn)行融合,得到管道各個(gè)部分缺陷的特征參數(shù)和反演圖形,其模型見圖3所示。信息融合策略采用RBF神經(jīng)網(wǎng)絡(luò),其融合來自8個(gè)傳感器的數(shù)據(jù)。
2.2RBF神經(jīng)網(wǎng)絡(luò)原理
RBF網(wǎng)絡(luò)是一種典型的局部逼近神經(jīng)網(wǎng)絡(luò),它不像全局逼近神經(jīng)網(wǎng)絡(luò)那樣,對(duì)每個(gè)輸入輸出數(shù)據(jù)對(duì)、每一個(gè)權(quán)值均需要調(diào)整,而是調(diào)整對(duì)輸出有影響的少量幾個(gè)權(quán)值,從而使局部逼近網(wǎng)絡(luò)在逼近能力和學(xué)習(xí)速度方面有明顯的優(yōu)勢(shì)[5]。
該RBF網(wǎng)絡(luò)結(jié)構(gòu)為8-20-1形式。輸入層8個(gè)節(jié)點(diǎn)只是傳遞輸入信號(hào)到隱層,隱層20個(gè)單元通過徑向基函數(shù)實(shí)現(xiàn)變換后輸出到輸出層。輸出層節(jié)點(diǎn)只是簡(jiǎn)單的線性函數(shù)。最常用的徑向基函數(shù)是高斯核函數(shù)(Gaussian kernel function),如式(1)所示。
![]()
其中,uj是j個(gè)隱層節(jié)點(diǎn)的輸出,X=(x1,x2,…,xn)T是輸入樣本,Tj是高斯函數(shù)的中心值,σj是標(biāo)準(zhǔn)化常數(shù),即徑向基寬度,M是隱層節(jié)點(diǎn)數(shù)。節(jié)點(diǎn)的輸出范圍在0和1之間,且輸入樣本越靠近節(jié)點(diǎn)的中心,輸出值越大。
網(wǎng)絡(luò)的輸出yi為隱層節(jié)點(diǎn)輸出uj的線性組合,如式(2)所示。
2.3訓(xùn)練方法
由式(1)可知,該網(wǎng)絡(luò)要學(xué)習(xí)的參數(shù)有3類:RBF的中心、寬度和連接權(quán)重。可以分別訓(xùn)練,也可同時(shí)進(jìn)行。在隱節(jié)點(diǎn)數(shù)確定的情況下,采用遺傳算法同時(shí)訓(xùn)練中心Tj、寬度σj以及隱層與輸出層的連接權(quán)重Wij。
遺傳算法是模擬生物進(jìn)化過程的計(jì)算模型。它對(duì)包含可能解的群體反復(fù)使用選擇、交叉和變異操作,不斷生成新的群體,使種群不斷進(jìn)化。當(dāng)輸入節(jié)點(diǎn)較多時(shí),該算法比傳統(tǒng)BP算法的全局最優(yōu)性更佳,速度更快[6]。算法的適應(yīng)度函數(shù)見式(3)。
![]()
其中,N為樣本數(shù)量,M為隱層節(jié)點(diǎn)數(shù),b為待定系數(shù)(一般取較大的值,以保證適應(yīng)度大于零),d為期望的輸出,y為網(wǎng)絡(luò)的實(shí)際輸出。 ![]()
擇概率S(j)見式(4)。其中,fj表示個(gè)體j的適應(yīng)度。S為群體規(guī)模。
文中采用單點(diǎn)交叉,將兩個(gè)基因串對(duì)應(yīng)交叉位的值相結(jié)合生成新的基因串。
重復(fù)選擇交叉和變異操作,直到網(wǎng)絡(luò)達(dá)到精度要求。
3實(shí)驗(yàn)
用簡(jiǎn)化的海底管道檢測(cè)裝置(漏磁檢測(cè)部件中僅安裝一排7個(gè)漏磁傳感器和一個(gè)溫度傳感器),在實(shí)驗(yàn)室條件下,取10個(gè)溫度點(diǎn)(-10~80℃,每10℃一個(gè)點(diǎn)),分別對(duì)一個(gè)半剖管道進(jìn)行檢測(cè)。該管道和實(shí)際海底管道具有相同材質(zhì)和管徑(195 mm),并按美國(guó)無損檢測(cè)標(biāo)準(zhǔn)要求,用電火花加工的方法,在其內(nèi)表面加工了多處不同尺寸、形狀和類型的缺陷。在每個(gè)溫度點(diǎn)處,每個(gè)漏磁傳感器取55個(gè)數(shù)據(jù),組成55組數(shù)據(jù),取44組作為訓(xùn)練樣本數(shù)據(jù),11組作為測(cè)試數(shù)據(jù),用上述神經(jīng)網(wǎng)絡(luò)方法進(jìn)行訓(xùn)練和測(cè)試,實(shí)現(xiàn)溫度誤差的融合補(bǔ)償。由于是多維輸入,訓(xùn)練速度較慢。在網(wǎng)絡(luò)誤差設(shè)為0.001的情況下,用高斯函數(shù)訓(xùn)練,一般需要經(jīng)過2 300步左右網(wǎng)絡(luò)才可以滿足要求。用遺傳算法訓(xùn)練,只需要1 700步。
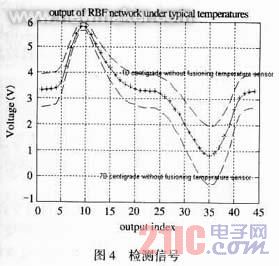
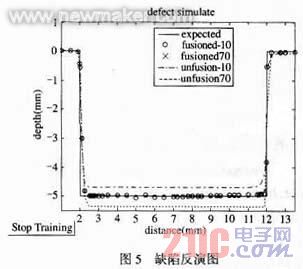
對(duì)一個(gè)長(zhǎng)10 mm,深5 mm的標(biāo)準(zhǔn)矩形缺陷進(jìn)行檢測(cè),在兩個(gè)典型溫度點(diǎn)下的網(wǎng)絡(luò)輸出見圖4。圖中實(shí)線是期望的輸出,兩條虛線分別是70℃和-10℃下,未融合的輸出,“ ○”線和“+”線是這兩個(gè)溫度點(diǎn)下融合后的輸出。由圖可見,融合前的兩條輸出波形偏離目標(biāo)曲線,而且表示缺陷特征的波峰波谷的水平和豎直間距與目標(biāo)值有一定的差距。融合后的輸出與期望值幾乎重合,補(bǔ)償效果顯著。圖5是反演后的缺陷圖。線型的意義與圖4相同。-10℃和70℃下的數(shù)據(jù)融合后反演出的缺陷與實(shí)際缺陷基本重合。未融合數(shù)據(jù)反演出的缺陷與實(shí)際缺陷深度有偏差。
定義傳感器的溫度敏感系數(shù)αS為在工作溫度范圍內(nèi),溫度變化1 K所引起的輸出電壓最大相對(duì)變化的平均值。
![]()
其中,S∈(1,2,…,44)為測(cè)量點(diǎn)序號(hào),隨著裝置在管道內(nèi)爬行,代表不同的檢測(cè)位置。t1、t2是工作溫度的上、下限值,U(t1)、U(t2)是S處溫度分別為t1、t2時(shí)傳感器的輸出值。用測(cè)試數(shù)據(jù)對(duì)網(wǎng)絡(luò)進(jìn)行校驗(yàn),檢驗(yàn)網(wǎng)絡(luò)的靈敏度和適應(yīng)能力。融合前后7個(gè)傳感器的平均溫度敏感系數(shù)分別為3.1×10-3K-1和2.3×10-5K-1。可見,多傳感器融合進(jìn)行溫度補(bǔ)償后傳感器的溫度敏感系數(shù)降低了兩個(gè)數(shù)量級(jí)。
4結(jié)論
該文將數(shù)據(jù)融合理論和神經(jīng)網(wǎng)絡(luò)方法應(yīng)用到漏磁傳感器誤差補(bǔ)償中,大大提高了漏磁檢測(cè)傳感器的穩(wěn)定性和準(zhǔn)確性。對(duì)多個(gè)漏磁傳感器和溫度傳感器檢測(cè)數(shù)據(jù)融合后,輸出值的溫度敏感系數(shù)降低了兩個(gè)數(shù)量級(jí),為整個(gè)檢測(cè)系統(tǒng)在高溫環(huán)境下測(cè)得高準(zhǔn)確度的結(jié)果提供了保障。當(dāng) 輸入節(jié)點(diǎn)多時(shí),用遺傳算法比用高斯函數(shù)訓(xùn)練網(wǎng)絡(luò)速度快。